Изобретение относится к измерительной технике и может быть использовано в системах стабилизации различных подвижных объектов.
Цель изобретения - повышение точности стабилизации.
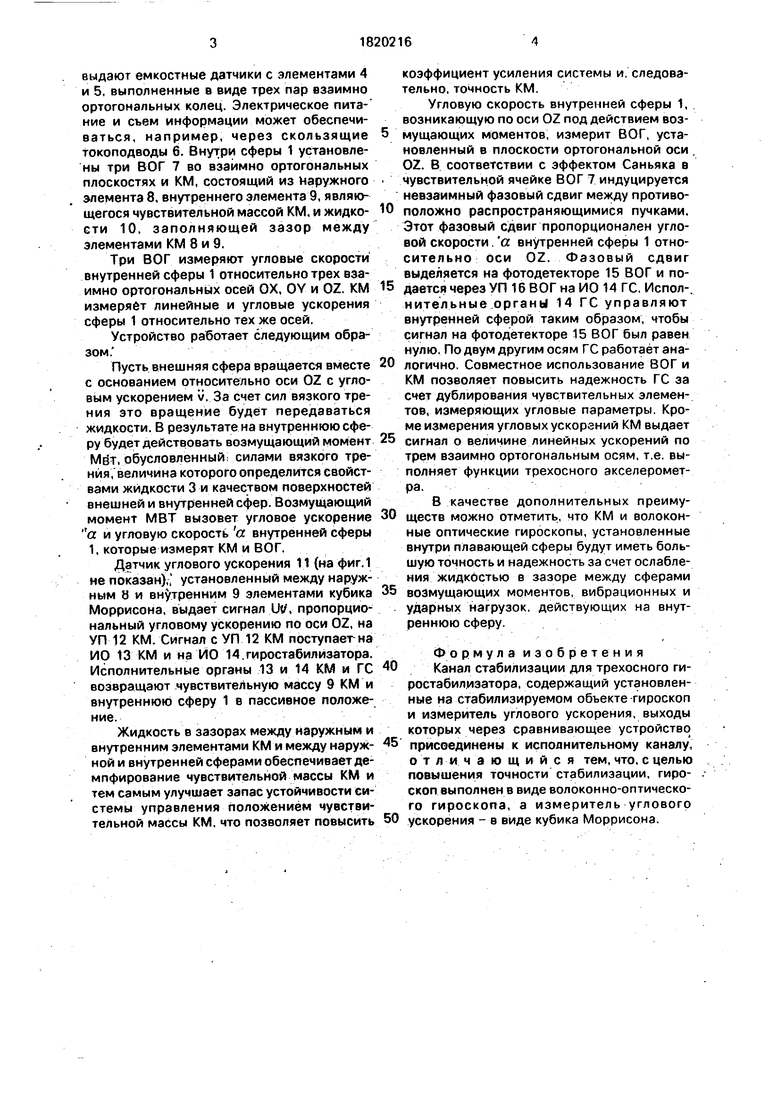
На фиг.1 представлена конструктивная схема гиростабилизатора; на фиг.2 представлена Структурная схема, поясняющая работу устройства, где 1 - внутренняя сфера; 2 - внешняя сфера; 3 - жидкость в зазоре между сферами; 4 - кольца трехосного емкостного датчика внутренней сферы: 5 - кольца трехосного емкостного датчика внешней сферы, 6 - скользящие токопрово- ды; 7 - чувствительные ячейки волоконных оптических гиросокопов (ВОГ); 8 - наружный элемент кубика Моррисона; 9- внутренний элемент кубика Моррисона; 10 - жидкость в зазоре между внутренним и наружным элементами кубика Моррисона; 11
-датчик углового ускорения; 12 - усилитель- преобразователь (У П) кубика Моррисона; 13
- исполнительные органы (ИО) кубика Моррисона; 14 - исполнительные органы гиростабилизатора (ГС); 15 - фотодетектор волоконно-оптического гироскопа; 16 - усилитель-преобразователь (УП) волоконно-оптического гироскопа; 17 - сравнивающее устройство.
Представленное на фиг.1 устройство содержит три канала стабилизации, являющиеся предметом настоящего изобретения.
Внутренняя сфера 1 нейтрально плавает внутри наружной сферы 2 в маловязкой жидкости 3. Использование маловязкой жидкости 3 обеспечивает пассивную стабилизацию внутри внутренней сферы 1 с размещенными в ней чувствительными элементами активной стабилизации. Полезную информацию о положении внутренней сферы 1 относительно наружной сферы 2
00
ISD
о
to
CN
выдают емкостные датчики с элементами 4 и 5, выполненные в виде трех пар взаимно ортогональных колец. Электрическое питание и съем информации может обеспечиваться, например, через скользящие токоподводы 6. Внутри сферы 1 установлены три ВОГ 7 во взаимно ортогональных плоскостях и КМ, состоящий из наружного элемента 8, внутреннего элемента 9, являющегося чувствительной массой КМ, и жидкости 10. заполняющей зазор между элементами КМ 8 и 9.
Три ВОГ измеряют угловые скорости внутренней сферы 1 относительно трех взаимно ортогональных осей OX, OY и OZ. КМ измеряет линейные и угловые ускорения сферы 1 относительно тех же осей.
Устройство работает следующим образом.
Пусть внешняя сфера вращается вместе с основанием относительно оси OZ с угловым ускорением v. За счет сил вязкого трения это вращение будет передаваться жидкости. В результате на внутреннюю сферу будет действовать возмущающий момент Мит, обусловленный: силами вязкого трения, величина которого определится свойствами жидкости 3 и качеством поверхностей внешней и внутренней сфер. Возмущающий момент МВТ вызовет угловое ускорение а и угловую скорость а внутренней сферы 1, которые измерят КМ и ВОГ.
Датчик углового ускорения 11 (на фиг.1 не показан),, установленный между наружным В и внутренним 9 элементами кубика Моррисона, выдает сигнал W, пропорцио нальный угловому ускорению по оси OZ, на УП 12 КМ. Сигнал с УП 12 КМ поступаегна ИО 13 КМ и на ИО 14.гиростабилйзатора. Исполнительные органы 13 и 14 КМ и ГС возвращают .чувствительную массу 9 КМ и внутреннюю сферу 1 в пассивное положение.
Жидкость в зазорах между наружным и внутренним элементами КМ и между наружной и внутренней сферами обеспечивает демпфирование чувствительной массы КМ и тем самым улучшает запас устойчивости системы управления положением чувствительной массы КМ, что позволяет повысить
коэффициент усиления системы и, следовательно, точность КМ.
Угловую скорость внутренней сферы 1, возникающую по оси OZ под действием возмущающих моментов, измерит ВОГ, установленный в плоскости ортогональной оси OZ. В соответствии с эффектом Саньяка в
чувствительной ячейке ВОГ 7 индуцируется невзаимный фазовый сдвиг между противо
положно распространяющимися пучками.
Этот фазовый сдвиг пропорционален угловой скорости. а внутренней сферы 1 отно- сительно оси OZ. Фазовый сдвиг выделяется на фотодетекторе 15 ВОГ и подается через УП 16 ВОГ на ИО 14 ГС. Испол-. нительные,органы 14 ГС управляют внутренней сферой таким образом, чтобы сигнал на фотодетекторе 15 ВОГ был равен нулю. По двум другим осям ГС работает аналогично. Совместное использование ВОГ и КМ позволяет повысить надежность ГС за счет дублирования чувствительных элементов, измеряющих угловые параметры. Кроме измерения угловых ускорений КМ выдает
сигнал о величине линейных ускорений по трем взаимно ортогональным осям, т.е. выполняет функции трехосного акселерометра.
В качестве дополнительных преимуществ можно отметить, что КМ и волоконные оптические гироскопы, установленные внутри плавающей сферы будут иметь большую точность и надежность за счет ослабления жид кбстью в зазоре между сферами
возмущающих моментов, вибрационных и ударных нагрузок, действующих на внутреннюю сферу.
Формула изобретения Канал стабилизации для трехосного ги- ростабилизатора, содержащий установленные на стабилизируемом объекте гироскоп и измеритель углового ускорения, выходы которых через сравнивающее устройство присоединены к исполнительному каналу, отличающийся тем, что, с целью повышения точности стабилизации, гироскоп выполнен в виде волоконно-оптического гироскопа, а измеритель углового ускорения - в виде кубика Моррисона.
3
Z
ы.-/
AL
М
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339002C1 |
| СПОСОБ КОНТРОЛЯ ДРЕЙФА ГИРОСКОПИЧЕСКОГО ПРИБОРА | 1994 |
|
RU2115094C1 |
| Двухступенчатый трехосный поплавковый гиростабилизатор | 1991 |
|
SU1820217A1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2341419C2 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ СТАБИЛИЗАЦИИ СЛАБОДЕМПФИРОВАННОГО НЕУСТОЙЧИВОГО ОБЪЕКТА УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2581787C2 |
| Акселерометр-кубик Моррисона | 1990 |
|
SU1781617A1 |
Изобретение относится к измерительной технике, в частности к системам стабилизации различных подвижных обьектов. Целью изобретения является повышение точности стабилизации. Поставленная цель достигается тем, что в канале стабилизации для трехосного гиростабилизатора, содержащем установленные на стабилизирующем объекте гироскоп и измеритель углового ускорения, а также сравнивающее устройство и исполнительный канал, гироскоп выполнен волоконно-оптическим, а измеритель углового ускорения выполнен в виде кубика Моррисона. 2 ил.
| Александер А | |||
| Миниатюрная поплавковая инерциэльная платформа | |||
| - Вопросы ракетной техники, 1970, № 5, с.75-87 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пельлор Д.С | |||
| Гироскопические при- боры и автоматы | |||
| М.: Машиностроение, 1964, с.. | |||
