Изобретение относится к области точного приборостроения и может использоваться в пространственных гиростабилизаторах, имеющих три и более осей карданова подвеса.
Известен способ [1] стабилизации гироскопической платформы путем компенсации внешнего возмущающего момента стабилизирующим двигателем на оси стабилизации, который управляется через усилитель стабилизации сигналом с датчика угла прецессии гироскопа, установленного на платформе осью чувствительности параллельно оси стабилизации.
Недостатком использования такого способа в трехосных и других пространственных гиростабилизаторах является рассогласование осей чувствительности гироскопов с осями стабилизации при поворотах корпуса прибора относительно стабилизируемой платформы. Это приводит к появлению перекрестных связей между каналами системы стабилизации и увеличению динамических ошибок.
Известен способ [2], [3] стабилизации платформы трехосного гиростабилизатора, при котором сигналы с датчика угла прецессии гироскопов, оси чувствительности которых отклоняются от осей стабилизации, подаются на входы усилителей стабилизации через синуснокосинусные преобразователи координат (сигналов) на осях карданова подвеса, позволяющие устранить влияние рассогласования осей чувствительности гироскопов с осями стабилизации. Этот способ принят за прототип.
Недостатком этого способа является возникновение дополнительной статической погрешности гиростабилизатора в виде угловых смещений платформы от положения стабилизации при повороте корпуса гиростабилизатора относительно оси, на которой установлен преобразователь координат.
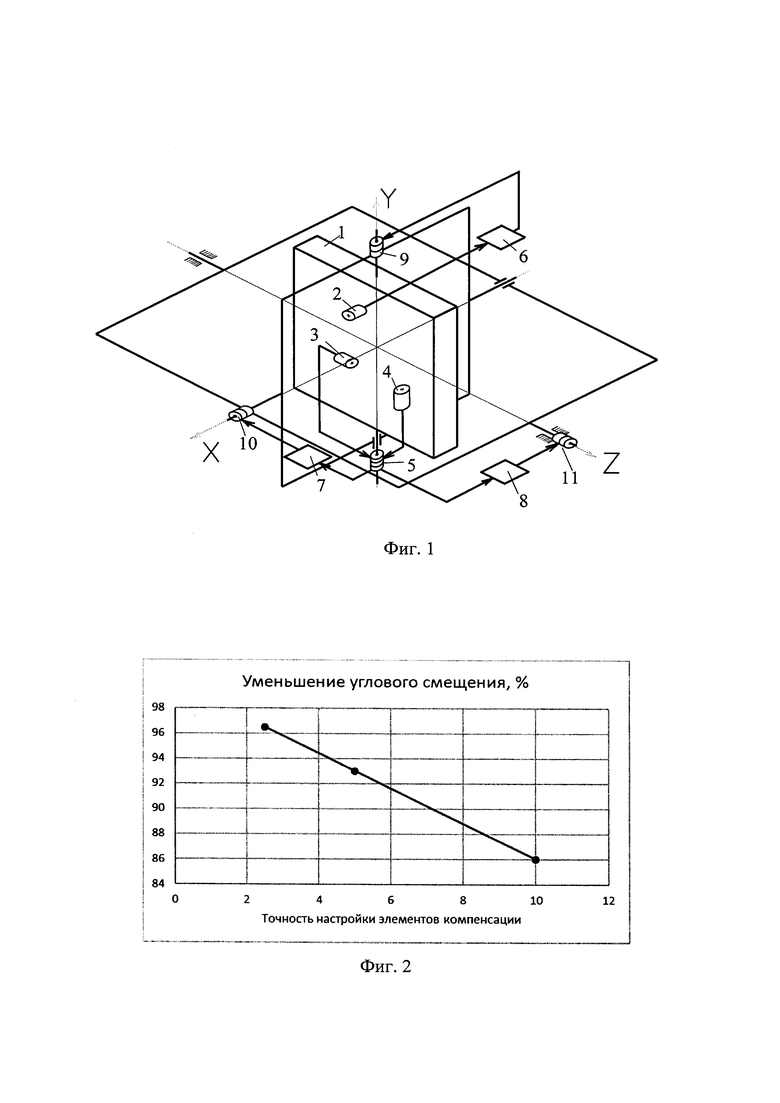
Рассмотрим причину возникновения такой погрешности на примере трехосного гиростабилизатора, структурно-кинематическая схема которого приведена на фиг. 1.
На стабилизируемой платформе 1 установлены двухстепенные гироскопы, снабженные датчиками угла прецессии (гироблоки) 2, 3, 4. Оси чувствительности гироскопов параллельны осям Y, X, Z карданова подвеса, являющимися осями стабилизации. При действии по осям Y, X, Z внешних возмущающих моментов происходит отклонение платформы от положения стабилизации на углы  , Δψ, Δϑ и соответствующий поворот гироскопов по оси прецессии в результате которого на выходе датчика угла прецессии гироблоков появляется напряжение ошибки.
, Δψ, Δϑ и соответствующий поворот гироскопов по оси прецессии в результате которого на выходе датчика угла прецессии гироблоков появляется напряжение ошибки.
Напряжение с выхода гироблока 2 внутренней оси Y непосредственно подается через усилитель стабилизации 6 на вход стабилизирующего двигателя 9, а напряжения с выходов гироблоков 3 и 4 промежуточной X и наружной Z осей подаются на входы усилителей стабилизации 7, 8 через преобразователь координат 5, установленный на оси Y и выполняющий преобразование сигналов по следующему закону [2]:

где  - угол поворота платформы по внутренней оси Y с установленным преобразователем координат,
- угол поворота платформы по внутренней оси Y с установленным преобразователем координат,
 - выходные напряжения датчиков угла прецессии (ДУП) гироблоков промежуточной оси X и наружной оси Z соответственно,
- выходные напряжения датчиков угла прецессии (ДУП) гироблоков промежуточной оси X и наружной оси Z соответственно,
UX, UZ - напряжения на входах усилителей стабилизации.
В качестве преобразователя координат может использоваться синуснокосинусный вращающийся трансформатор, синусно-косинусный потенциометр или преобразователь типа вал-цифра с обработкой сигнала в вычислительном устройстве [3].
Напряжения с выходов усилителей стабилизации 7, 8 подаются на входы стабилизирующих двигателей 10 и 11 осей X и Z соответственно.
Гироблоки, преобразователь координат, усилители стабилизации и стабилизирующие двигатели образуют систему стабилизации, коэффициенты усиления которой настраиваются с учетом требований к точности гиростабилизатора.
Система стабилизации прототипа работает следующим образом.
Действие на осях подвеса внешних возмущающих моментов вызывает прецессию соответствующих гироскопов и отклонение платформы по осям стабилизации гиростабилизатора.
Поэтому можно записать соотношения
где:
βY, βX, βZ - углы отклонения гироскопов Y, X, Z по оси прецессии,
 , Δψ, Δυ - углы отклонения платформы по осям стабилизации,
, Δψ, Δυ - углы отклонения платформы по осям стабилизации,
КГ - коэффициент передачи гироблока.
На выходе ДУП гироблоков возникают сигналы
где  , UΔψ, UΔυ - выходные напряжения ДУП гироблоков внутренней оси Y, промежуточной оси X и наружной оси Z соответственно,
, UΔψ, UΔυ - выходные напряжения ДУП гироблоков внутренней оси Y, промежуточной оси X и наружной оси Z соответственно,
Кдуп - коэффициент передачи датчика угла прецессии гироблока.
Под действием преобразованных и усиленных сигналов с ДУП гироблоков стабилизирующие двигатели создают моменты, компенсирующие моменты возмущения и прецессия гироскопов прекращается.
При этом настройкой коэффициентов усиления усилителей стабилизации обеспечиваются малые значения углов отклонения платформы от положения стабилизации и, соответственно, углов прецессии гироскопов.
Для статического режима гиростабилизатора можно записать
где KPY, KPX, KPZ - коэффициенты передачи регулятора по осям Y, X, Z, равные произведению коэффициента передачи усилителя стабилизации на коэффициент передачи стабилизирующего двигателя,
MBY, MBX, MBZ - моменты возмущения по осям Y, X, Z,
δUY, δUX, δUZ - напряжения смещения нулевого сигнала, приведенные ко входам усилителей стабилизации осей Y, X, Z соответственно.
Полагая коэффициенты регулятора по осям стабилизации одинаковыми KPY=KPX=KPZ=KP и разрешая уравнения (4) относительно напряжений на выходе ДУП, получаем равенства:
Учитывая, что реализуемое значение KP много больше MBY, MBX, MBZ, можно допустить, что
При таком допущении выражения (5) примут вид:

Используя известное равенство

из выражений (6) получаем
Учитывая, что напряжение на выходе ДУП гироблока связано с углом поворота платформы через коэффициенты передачи КГ, и Кдуп, из уравнений (2), (3), (7) получаем
Из соотношений (9), (10) видно, что постоянное смещение нулевого сигнала δUX, δUZ в каналах X и Z при рассогласовании осей чувствительности гироблоков с осями стабилизации, приводит к смещениям платформы от исходного положения на углы Δψ, Δϑ, изменяющихся по гармоническому закону в зависимости от угла поворота корпуса гиростабилизатора по оси Y, на которой установлен преобразователь координат.
Целью изобретения является повышение точности стабилизации за счет уменьшения угловых смещений гироскопической платформы, возникающих при повороте корпуса гиростабилизатора.
Указанная цель достигается компенсацией смещения нулевого сигнала в усилителях стабилизации за счет использования специальных регулировочных элементов компенсации (на чертеже не указаны).
Параметры специальных регулировочных элементов компенсации (регулировочные элементы компенсации) выбираются при настройке гиростабилизатора.
Из причин смещения нулевого сигнала усилителей стабилизации можно выделить следующие:
- погрешность балансировки каскадов усилителей стабилизации;
- фазовый сдвиг квадратурной составляющей сигнала датчика угла прецессии гироблоков относительно опорного напряжения демодулятора усилителей стабилизации.
В качестве регулировочных элементов компенсации могут быть использованы следующие элементы:
1. элементы схемы усилителей стабилизации, обеспечивающие изменение уровня нулевого сигнала усилителей стабилизации;
2. формирователи напряжения компенсации, дополнительно вводимые в состав гиростабилизатора, позволяющие изменять уровень нулевого сигнала на входе усилителей стабилизации.
Так как смещение нулевого сигнала определяется не только точностью настройки усилителя стабилизации (балансировкой каскадов), но и взаимодействием элементов системы стабилизации, операции компенсации смещения нулевого сигнала необходимо выполнять после окончательной сборки гиростабилизатора и настройки коэффициентов усиления усилителей стабилизации.
Заявляемый способ стабилизации гироскопической платформы предусматривает следующую последовательность действий:
1. Гиростабилизатор включается в режиме стабилизации по всем осям с компенсацией видимых уходов: режим работы, при котором сигналы с датчика угла прецессии гироскопов подаются через преобразователи координат (сигналов), установленных на осях карданова подвеса, и через усилители стабилизации на стабилизирующие двигатели, при этом компенсируются видимые уходы стабилизируемой платформы относительно корпуса гиростабилизатора, вызванные вращением Земли.
2. Выбирается ось с установленным преобразователем координат, последовательно от внутренней оси к наружной.
3. Производится поворот корпуса гиростабилизатора в диапазоне углов прокачки относительно выбранной оси с установленным преобразователем координат.
При этом контролируется угловое положение платформы и определяются углы поворота корпуса, при которых углы отклонения платформы от положения стабилизации достигают максимальных значений (углы Δψ, Δϑ из выражений (9), (10)).
4. В найденных положениях корпуса при помощи изменения параметров регулировочных элементов компенсации, позволяющих изменять уровни нулевого сигнала усилителей стабилизации, достигается минимизация контролируемых углов смещения платформы по абсолютному значению.
5. Операции по пунктам 3-4 выполняются с каждой из других осей с установленным преобразователем координат, последовательно от внутренней оси к наружной, после чего определение параметров регулировочных элементов компенсации завершается.
При повторении действий по пунктам 2-5 настраиваются параметры регулировочных элементов компенсации, обеспечивающие минимальные угловые смещения платформы при поворотах корпуса гиростабилизатора.
Техническим результатом заявленного решения является повышение точности стабилизации гироплатформы.
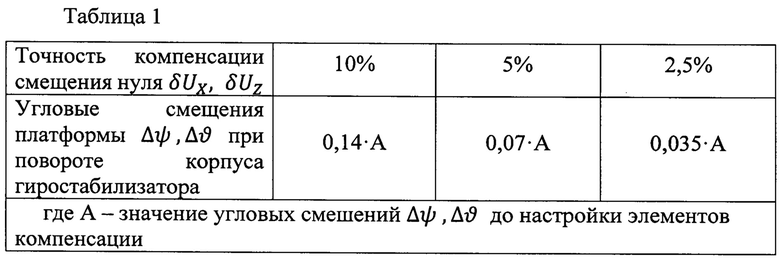
Из выражений (9), (10) следует, что при точности компенсации напряжений смещения нулевого сигнала усилителей δUX, δUZ с точностью от 10% до 2,5% значения углов смещения платформы от исходного положения Δψ, Δϑ уменьшаются на 86-96%, что подтверждается экспериментальными результатами.
Зависимости уменьшения углового смещения платформы при повороте корпуса гиростабилизатора от точности компенсации смещения нуля усилителей стабилизации приведены в таблице 1 и на графике фиг. 2.
Таким образом, заявлен способ стабилизации гироскопической платформы, заключающийся в подаче сигналов с датчика угла прецессии гироскопов через преобразователи координат (сигналов), установленных на осях карданова подвеса, и через усилители стабилизации на стабилизирующие двигатели, в котором для уменьшения угловых смещений платформы при поворотах корпуса гиростабилизатора выполняется настройка регулировочных элементов компенсации смещения нулевого сигнала усилителей стабилизации, а именно, гиростабилизатор включается в режиме стабилизации по всем осям с компенсацией видимых уходов, при котором сигналы с датчика угла прецессии гироскопов подаются через преобразователи координат (сигналов), установленных на осях карданова подвеса, и через усилители стабилизации на стабилизирующие двигатели, при этом компенсируются уходы стабилизируемой платформы относительно корпуса гиростабилизатора, вызванные вращением Земли, далее выбирается ось с установленным преобразователем координат последовательно от внутренней оси к наружной, после чего последовательно выполняются операции для каждой из выбранных осей, при повторении которых настраиваются параметры регулировочных элементов компенсации, в качестве которых используются элементы схемы усилителей стабилизации или формирователи напряжений компенсации, дополнительно вводимые в состав гиростабилизатора, позволяющие изменять уровень нулевого сигнала усилителей стабилизации: производится поворот корпуса гиростабилизатора в диапазоне углов прокачки относительно выбранной оси с установленным преобразователем координат, при этом контролируется угловое положение платформы и определяются углы поворота корпуса, при которых углы отклонения платформы от положения стабилизации достигают максимальных значений, в найденных положениях корпуса при помощи изменения параметров регулировочных элементов компенсации достигается минимизация углов смещения платформы по абсолютному значению; после выполнения описанных выше действий с каждой из осей с установленным преобразователем координат определение параметров регулировочных элементов компенсации завершается.
| название | год | авторы | номер документа |
|---|---|---|---|
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |
| ОДНООСНЫЙ СИЛОВОЙ ГИРОСТАБИЛИЗАТОР | 2008 |
|
RU2382331C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| СПОСОБ АВТОНОМНОЙ НАЧАЛЬНОЙ ВЫСТАВКИ СТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА В ПЛОСКОСТЬ ГОРИЗОНТА И НА ЗАДАННЫЙ АЗИМУТ | 2015 |
|
RU2608337C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| Устройство управления стабилизирующими моторами курсовертикали | 2022 |
|
RU2787311C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
| Установка для настройки одноосного силового горизонтального гиростабилизатора малогабаритного путеизмерительного устройства в лабораторных условиях | 2020 |
|
RU2743640C1 |
| Гироскопический стабилизатор с контуром управления усилием в опорах гироблока | 2022 |
|
RU2789307C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
Изобретение относится к области точного приборостроения и может использоваться в пространственных гиростабилизаторах, имеющих три и более осей подвеса. Способ стабилизации гироскопической платформы заключается в подаче сигналов с датчика угла прецессии гироскопов через преобразователи координат (сигналов) и усилители стабилизации на стабилизирующие двигатели, при этом в усилителях стабилизации выполняется компенсация смещения нулевых сигналов из условия минимизации абсолютного значения контролируемых углов отклонения платформы от положения стабилизации при поворотах корпуса относительно осей с преобразователями координат. Техническим результатом заявленного решения является повышение точности стабилизации гироплатформы. 2 ил., 1 табл.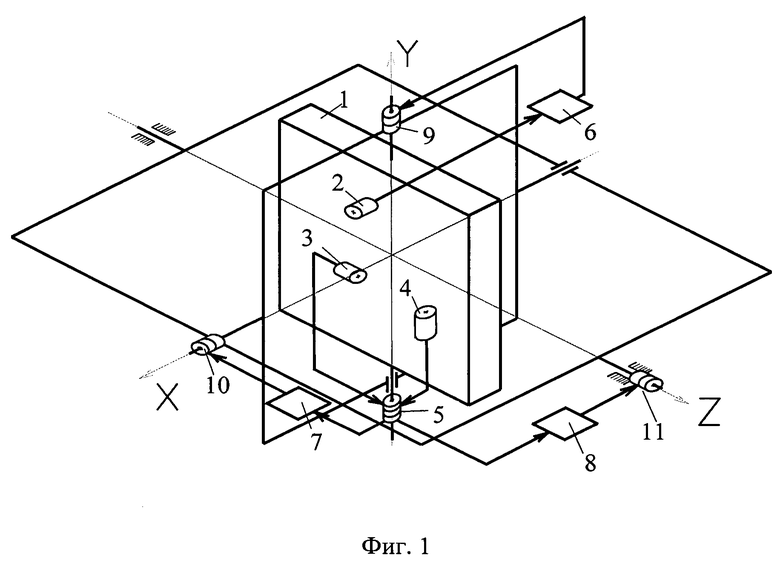
Способ стабилизации гироскопической платформы, заключающийся в подаче сигналов с датчика угла прецессии гироскопов через преобразователи координат (сигналов), установленных на осях карданова подвеса, и через усилители стабилизации на стабилизирующие двигатели, отличающийся тем, что для уменьшения угловых смещений платформы при поворотах корпуса гиростабилизатора выполняется настройка регулировочных элементов компенсации смещения нулевого сигнала усилителей стабилизации, а именно: гиростабилизатор включается в режиме стабилизации по всем осям с компенсацией видимых уходов, при котором сигналы с датчика угла прецессии гироскопов подаются через преобразователи координат (сигналов), установленных на осях карданова подвеса, и через усилители стабилизации на стабилизирующие двигатели, при этом компенсируются видимые уходы стабилизируемой платформы относительно корпуса гиростабилизатора, вызванные вращением Земли, далее выбирается ось с установленным преобразователем координат последовательно от внутренней оси к наружной, после чего последовательно выполняются операции для каждой из выбранных осей, при повторении которых настраиваются параметры регулировочных элементов компенсации, в качестве которых используются элементы схемы усилителей стабилизации или формирователи напряжений компенсации, дополнительно вводимые в состав гиростабилизатора, позволяющие изменять уровень нулевого сигнала усилителей стабилизации: производится поворот корпуса гиростабилизатора в диапазоне углов прокачки относительно выбранной оси с установленным преобразователем координат, при этом контролируется угловое положение платформы и определяются углы поворота корпуса, при которых углы отклонения платформы от положения стабилизации достигают максимальных значений, в найденных положениях корпуса при помощи изменения параметров регулировочных элементов компенсации достигается минимизация углов смещения платформы по абсолютному значению; после выполнения описанных выше действий с каждой из осей с установленным преобразователем координат определение параметров регулировочных элементов компенсации завершается.
| Способ стабилизации гироскопической платформы и устройство для его осуществления | 2015 |
|
RU2614924C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| US 8005635 B2, 23.08.2011 | |||
| US 5379223 A1, 03.01.1995 | |||
| Соединительный блок для подрывных инициирующих устройств | 2016 |
|
RU2645061C1 |

