Изобретение относится к навигации и может быть использовано для определения глубины установки маяка-ответчика.
Целью изобретения является повышение точности определения глубины установки маяка-ответчика и сокращение времени определения глубины установки маяка-ответчика.
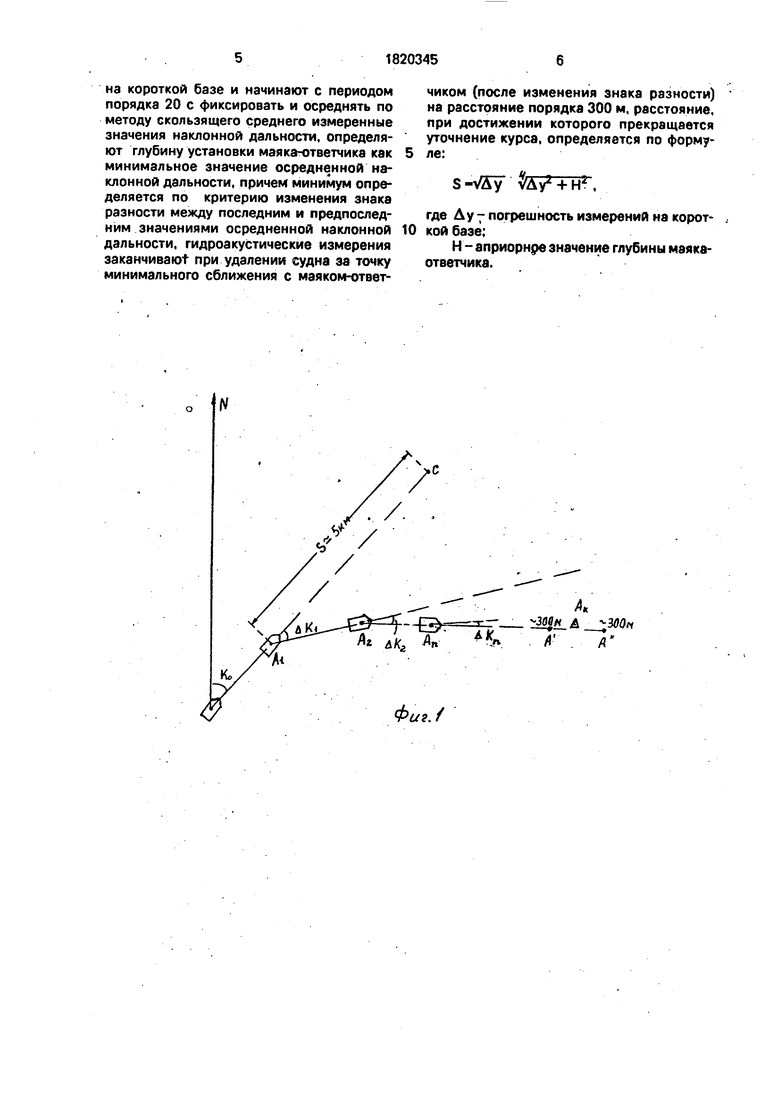
На фиг.1 обозначены действительное и предполагаемое места маяка-ответчика, а также точки изменения курса, скорости и производства гидроакустических измерений для осуществления маневра прохода над точкой нахождения маяка-ответчика или вблизи нее, где
АО - исходное положение судна,
С - априорное место маяка-ответчика;
Ак - фактическое место маяка-ответчика;
Ко - начальный курс на маяк-ответчик;
N - направление на север;
S - расстояние до априорной точки расположения маяка-ответчика;
AI - точка начала гидроакустических измерений и уточнений курса судна;
AKi, ДК2... ДКп - вычисленные поправки к курсу;
А - точка увеличения частоты измерений ГАС и начала фиксации и обработки наклонных дальностей ( 300 м до маяка- ответчика);
А - точка конца гидроакустических измерений ( Ј300 м после прохождения мая- . ка-ответчика).
00
ho О
CJ
Ь.
На фиг.2 - схема реализации предлагаемого способа, где 1 - навигационный комплекс; 2 - блок определения дальности и направления на точку априорных координат маяка-ответчика; 3 - блок анализа условий; А - гидроакустическая система; 5 - блок выработки поправок к курсу; 6 - 8 - блоки осреднения по алгоритму скользящего среднего; 9 - блок выработки уточненного заданного курса К3ад,на маяк-ответчик; 10- блок выработки заданий скорости движения судна; 11 - блок анализа осредненной наклонной дальности Он на минимум; 12 - блок выработки оценки глубины установки маяка-ответчика Нмо.
Основную информацию для решения задачи вырабатывает навигационный комплекс 1. Блок 2 rio информации о координатах судна фс, Ас и априррных координатах маяка-ответчика РМО , Амо вырабатывает априорный заданный курс на маяк-ответчик Кзад и расстояние до маяка-ответчика S.
Основным управляющим звеном является блок анализа условий 3. Блок 3 в функции расстояний до маяка-ответчика и результатов измерений и обработки информации вырабатывает сигналы управления режимами работы гидроакустической системы 4 и величину скорости судна.
В начале решейием задачи по данным о кйордикатах судна ,иЛс и априорных координатах рмъ , и Амо вырабатывается начальное значение заданного курса и назначается скорость движения.
В процессе движения блоком 3 контролируется расстояние S судна до маяка-ответчика и при достижении дальности, соответствующей энергической дальности гидроакустической станции, снижает скоро,- сть судна до необходимой и начинает измерение в режиме короткая база.
В этом режиме гидроакустическая система 4 вырабатывает координаты маяка-ответчика - Хмо, YMO в связанной с судном горизонтальной системе координат. По этим данным вырабатываются поправки ю курсу судна Л К в блоке 5 и осредненная поправка А К для обеспечения прохождения судна над маяком-ответчиком или возможно ближе к этой точке.
Величины Хмо, YMO, А К, Он осредняют- . ся по алгоритму скользящего среднего в блоках 6,7,8.
Осредненная величина Хмо попадает в блок 3 и анализируется. При достижении заданного малого расстояния до маяка-ответчика ( 300 м) блок 3 выдает команду на увеличение частоты измерений гидроакустической системой на короткой базе. При
этом наклонные дальности осредняются по методу скользящего среднего. Осреднен- ные значения Он поступают в блок 11, осуществляющий анализ на минимум.
Минимум определяется по критерию изменения знака разности последнего и предпоследнего значений скользящего среднего значения Он. Анализируется и устойчивость изменения знака разности с учетом шумов и ошибок. Для этого измерения Он продолжаются еще 300 м после первой фиксации изменения знака разности.
В блоке 12 в качестве глубины маяка-ответчика Нмо принимается минимальное ос- 0едненное значение наклонной дальности Он.
Изобретение позволяет повысить точ- ность определения глубин маяка-ответчика
и сократить продолжительность времени осуществления маневра для прохода судна над точкой нахождения маяка-ответчика. Формулаизобретения Способ определения глубины установки
гидроакустического маяка-ответчика, включающий определение наклонных дальностей до маяка-ответчика, формирование заданных параметров движения судна в зависимости от наклонных дальностей, стабилизацию движения судна с .заданными параметрами, определение горизонтального расстояния до маяка-ответчика, отличающийся тем, что, с целью повышения точности определения глубины установки
маяка-ответчика и уменьшения времени выполнения работ при достижении расстояния, соответствующего энергетической дальности маяка-ответчика, снижают скорость хода и производят измерение гидроакустической системой в режиме короткой базы, определяют продольную и поперечную координаты маяка-ответчика в связанной с судном системе координат с периодом порядка 1 мин, по результатам каждого измерения вырабатывают поправку к заданному курсу как арктангенс отношения поперечной и продольной составляющих координат маяка-ответчика, поправку осредняют по методу скользящего среднего, уточняют за0 данный курс с учетом осредненной поправки, осредняют по методу скользящего среднего измеренные значения продольной координаты маяка-ответчика и сравнивают осредненное значение продольной коорди5 наты с расчетным значением горизонтального расстояния S, при достижении которого прекращают уточнение курса, при достижении измеряемым горизонтальным расстоянием заданного малого значения
(S 300 м) увеличивают частоту измерений
на короткой базе и начинают с периодом порядка 20 с фиксировать и осреднять по методу скользящего среднего измеренные значения наклонной дальности, определяют глубину установки маяка-ответчика как минимальное значение осредненной наклонной дальности, причем минимум определяется по критерию изменения знака разности между последним и предпоследним значениями осредненной наклонной дальности, гидроакустические измерения заканчивают при удалении судна за точку минимального сближения с маяком-ответчиком (после изменения знака разности) на расстояние порядка 300 м, расстояние, при достижении которого прекращается уточнение курса, определяется по форму- ле:
S foy2 Ч- И2 ,
где А у 7 погрешность измерений на корот- кой базе;
Н - априорное значение глубины маяка- ответчика.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЛЕДНОГО ПРИЕМА СИГНАЛОВ СПУТНИКОВЫХ НАВИГАЦИОННЫХ СИСТЕМ ПРИ НАХОЖДЕНИИ ПОДВОДНОГО ОБЪЕКТА НА ГОРИЗОНТЕ ПЛАВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГИДРОАКУСТИЧЕСКОГО КАНАЛА ПЕРЕДАЧИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2008 |
|
RU2398316C2 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| Способ гидроакустического поиска автономного донного подводного объекта | 2019 |
|
RU2727331C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| УТОЧНЕННОЕ ПОЗИЦИОНИРОВАНИЕ В ПОДВОДНОМ НАВИГАЦИОННОМ ПРОСТРАНСТВЕ, ОБРАЗОВАННОМ ПРОИЗВОЛЬНО РАССТАВЛЕННЫМИ ГИДРОАКУСТИЧЕСКИМИ МАЯКАМИ-ОТВЕТЧИКАМИ | 2011 |
|
RU2488842C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ НАЧАЛЬНЫХ КООРДИНАТ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2016 |
|
RU2629916C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |

Изобретение относится к навигации и может быть использовано для определения глубины установки маяка-ответчика. Цель изобретения - повышение точности определения глубины установки маяка-ответчика и сокращения времени, определения глубины установки маяка-ответчика. Цель изобретения достигается измерением продольной с поперечной координат маяка-ответчика вычислением поправки к заданному курсу как арктангенс отношения поперечной к продольной составляющей координат маяка-ответчика,, осреднением поправки к курсу методом скользящего среднего, осреднением стабилизированных параметров движения судят по методу скользящего среднего, а также осреднением по методу скользящего среднего наклонной дальности до маяка- ответчика. Глубину установки маяка-ответчика определяют как минимальное значение осредненной наклонной дальности, причем максимум определяется по критериям изменения знака разности между последним и предпоследним значениями осредненной наклонной дальности. 2 ил.
Л -
ft . A
Фиг./
Т
:
Коррект. коорд.
eye™Ши,:г
| Бородин В.И | |||
| и др | |||
| Гидроакустические навигационные средства | |||
| Л.: Судостроение, 1983, с.83-85. |
