Физ.1
Изобретение относится к области волновых электрических двигателей.
Цель изобретения - расширение функциональных возможностей и обеспечение герметичности конструкции.
На фиг. 1 показан линейный электродвигатель (общий внешний вид); на фиг. 2 - местный продольный разрез электродвигателя (первый вариант исполнения двигателя): на фиг. 3 - местный продольный разрез электродвигателя (второй вариант исполнения двигателя); на фиг. 4 - двигательное устройство, составленное из линейных электродвигателей (первый вариант двигательного устройства); на фиг. 5 - двигатель- ное устройство (первый вариант двигательного устройства, вид с торца); на фиг. 6 - двигательное устройство, составленное из линейных электродвигателей (второй вариант двигательного устройства, вид с торца); на фиг. 7 - двигательное устройство, составленное из линейных электродвигателей (второй вариант устройства, общий продольный вид); на фиг. 8 - двигательное устройство, составленное из линейных электродвигателей (третий вариант двигательного устройства, общий продольный вид); на фиг. 9 - возвратно-поступательная кинематическая пара звеньев с линейными электродвигателями; на фиг. 10 дана шарнирная кинематическая пара звеньев с линейными электродвигателями (первый вариант расположения электродвигателей); на фиг. 11 - шарнирная кинематическая пара звеньев с линейными электродвигателями (второй вариант расположения электродвигателей); на фиг. 12 - шарнирная кинематическая пара звеньев с линейными электродвигателями (третий вариант расположения электродвигателей); на фиг. 13 - насос, выполненный на линейном электродвигателе (общий вид); на фиг, 14 - местный продольный разрез насоса, выполненного на линейном электродвигателе,
Линейный электродвигатель (фиг. 1-3), являющийся двигателем волнового типа, содержит гибкую оболочку 1, надетую на стержень, выполненный в виде гибкой трубы 2. На стенках трубы 2 установлена многофаз- ИЯР (или многосекционная) обмотка 3, витки которой могут быть вделаны в стенки трубы 2 (фиг. 2, 3). В стенки трубы 2 могут быть также вделаны магнитопроводные каркасы секций обмотки 3. Иными словами, гибкая труба 2 может быть армирована обмоткой 3 и гибкими магнитопроводиыми частями. Оболочка 1 может быть ферромагнитной или неферромагнитной, например, из резины или полимера.
В продольном внутреннем канале 4 (или полости) трубы 2, а также между внешней стенкой трубы 2 и гибкой оболочкой 1 помещена ферромагнитная жидкость 5 (или ферромагнитная суспензия).
Оболочка 1 может быть соединена с гибкой трубой 2, например, с торцов.
С торцов к оболочке 1 крепятся и разъемы 6 и 7 (фиг. 1), к одному из которых можно
подсоединять датчик 8, а к другому подключать разъем 9 кабеля 10 питания и управления двигателем.
Электродвигатель (фиг. 1-3) работает следующим образом.
5 Многофазная или многосекционная обмотка 3 создает бегущее вдоль трубы 2 магнитной поле (показано на фиг. 2, 3 прерывистыми линиями или в виде контура), которое создает пучности ферромагнитной
0 жидкости 5 между трубой 2 и оболочкой 1. Пучности или волны ферромагнитной жидкости 5 бегут вдоль трубы 2 вслед за бегом магнитного поля. От бога волн ферромагнитной жидкости 5 гибкая оболочка 1 также
5 приобретает соответствующее волнообразное состояние, приводящее к волновому сцеплению оболочки 1 с грунтом (фиг. 1). Вследствие бега волн по оболочке 1, весь двигатель (фиг. 1), заключенный в оболочку
0 1, ползет вперед, волнообразно отталкиваясь от грунта, Как нетрудно видеть из указанного, движение электродвигателя с гибкой оболочкой 1 (фиг. 1) напоминают движение червя. Изменением частоты питания
5 данного электрического двигателя-червя можно изменять скорость его передвижения. При изменении направления бега волн оболочки 1 двигагель-черьь переходит в реверс (т.е. может ползти в обратную сторону).
0 Двигатель-червь (фиг. 1) полностью элект- роуправляем.
Если требуется повышенная маневренность объекта, то на базе вышеуказанного двигателя-червя (фиг. 1 -3) можно построить
5 двигательные устройства, например, по вариантам фиг. 4-7. Так, по первому варианту (фиг. 4,5) высокоманевренное двигательное устройство строится на, например, трех червях-электродвигателях 11, 12, 13(вышеопи0 санной конструкции, фиг. 1-3), которые соединены друг с другом продольными эластичными перемычками-застежками типа молния. По другому варианту (фиг. 6, 7) четыре двигателя-червя 11, 12, 13. 14, между
5 которыми установлена продольная капсула-контейнер 15с полезным грузом или аппаратурой, соединены друг с другом посредством торцевых пластин 16. соединенных с торцевыми разъемами двигателей. В вариантах по фиг 4. 5 и 6 7 сочетанием
запитывания определенных из червей-двигателей всего пучка можно легко менять направление движения всего двигательного устройства. Так, если в устройстве по фиг. 6, 7 запитывать червь-двигатель 11, а двигатель 14 обесточивать, то все устройство при движении будет поворачивать в соответствующую сторону. Аналогично работает и устройство по фиг. 4, 5. Таким образом устройства (фиг. 4-7), составленные из пучков червей-двигателей вышеуказанной конструкции, позволяют легко маневрировать и перемещать полезные грузы в трехмерном пространстве.
Если тяги или длины одного электродвигателя-червя не хватает, то двигательное устройство можно удлинять путем, например, последовательного соединения червей-двигателей 11 и 12 через их унифицированные торцевые разъемы. Это показано на фиг. 8.
Помимо самостоятельных передвигающихся устройств, черви-двигатели описанных конструкций можно применять и в двигательном аппарате различных роботов и манипуляторов, эти варианты показаны на фиг. 9-12.
Так, если требуется реализовать воз- врйтно-постунательную кинематическую пару робота, то можно применить вариант по фиг. 9. В этом случае (фиг. 9) берется скелет кинематической пары, состоящий из звена 17 и звена 18, и на данный скелет надевается двигательный аппарат, выполненный на черзях-электродвигателях 11 и 12 и дополнительных трубах. Левые концы червей-двигателей 11, 12 через торцевую панель 19 соединяются со звеном 17. Правые части червей-двигателей 11, 12 входят внутрь дополнительных (более жестких по отношению к гибким оболочкам 1 червей 11, 12) труб 20 и 21, которые, в свою очередь, соединены со звеном 18, служащим направ- ляющими для звена 17. Правые концы двигателей 11,12 могут соединяться с панелью 22, соединенной со звеном 17, на одном из концов которого может находиться полезная нагрузка 23. При работе варианта по фиг. 9 черви-двигатели 11 и 12 проползают через дополнительные трубы 20 и 21, от чего звено 17, соединенное с двигателями 11,12, может совершать линейное перемещение относительно звена 18 в ту или иную сторону (показано обоюдоострой стрелкой на фиг. 9).
Если реализовывать шарнирную пару робота, то здесь можно отметить несколько вариантов, показанных на фиг. 10-17.
Так по варианту фиг. 10, где показана плоская шарнирная пара робота, берется
скелет шарнирной кинематической пары, состоящей из звена 24, звена 25 и вала или шарнира 26, соединяющего звенья 24 и 25. и на данный скелет надевается двигатель5 ный аппарат, выполненный на червях-двигателях 11, 12, 13, 14 и дополнительных трубках 20, 21 и 27, 28, которые соединены со звеном 25. При этом черви-двигатели 11, 12 и 13, 14 продеты через указанные (еоот10 ветствующие) трубы 20, 21 и 27, 28, а левые концы двигателей через соответствующие разьемы соединяют двигатели 11-14 со эвеном 24. При работе варианта по фиг. 10 черви -двигатели 11-14, проползая через
5 трубы 20, 21, 27, 28, поворачивают звено 24 относительно звена 25 в ту или иную сторону вращения. При указанном можно заметить, что когда черви-двигатели 11, 12 проползают сквозь трубы 20, 21 слева на0 право, то черви-двигатели 13, 14 должны проползать сквозь трубы 27, 28 справа налево (и наоборот).
В другом варианте шарнирной пары, показанной на фиг. 11, на скелет, выполнен5 ный на звеньях 24, 25 и вале или шарнире 26, надевается двигательный аппарат, выполненный на червях-электродвигателях
11,12 и дополнительных трубах 20, 21, сквозь которые продеты двигатели 11, 12,
0 все концы которых через панель 29 соединены со звеном 25. При работе варианта фиг. 11 черви-двигатели 11,12, проталкивая, трубы 20, 21 в какую-либо сторону, вызывают поворот звена 24 относительно звена 25,
5
Вариант по фиг. 12 строится на базе ранее описанного варианта фиг. 10, только в варианте фиг. 12 шарнирная пара выполняется объемной, т.е. имеет объемный шар0 нир 30. Для движения звена 24 в плоскости, перпендикулярной плоскости чертежа фиг.
12,в двигательном аппарате фиг. 12 добавляется новый червь-двигатель 31, продетый через трубу 32. Аналогичные элементы мо5 гут располагаться и с противоположной (невидимой на фиг. 12) стороны от шарнира 30. При работе варианта по фиг. 12 двигатели 11, 12, 13, 14 вращают звено 24 в плоскости чертежа фиг. 12, а двигатель 31, проползая
0 через трубку 32, вращает звено 24 в плоскости, перпендикулярной плоскости чертежа фиг. 12. В результате действия всех двигателей звено 24 может совершать поворот на значительный объемный (или телесный) угол
5 относительно звена 25.
В ряде случаев двигательный аппарат робототехнических устройств можно (для большей пылезащищенности) накрывать сверху легкой полимерной кожей-пленкой 33 (фиг. 12).
Помимо функций перемещения твердых тел, настоящий электрический двигатель- червь можно применять и как насос перистальтического типа (фиг. 13, 14). Для этого червь-электродвигатель 11 (фиг. 13, 14) помещают внутрь дополнительной трубы 34 (электродвигатель 11 может сам туда заползти) и прикрепляют концы электродвигателя 11 к трубе 34 (например, с помощью торцевых разьемов б и 7, соединяемых с разъемами 35 и 36 трубы 34). При работе червь-электродвигатель 11, создавая волновые деформации своей оболочки и находясь в трубе 34, способствует перекачиванию жидкости между внешней оболочкой двигателя 11 и внутренними стенками трубы 34. т.е. действует как простой перистальтический насос.
Как нетрудно видеть из вышеизложенного, во всех вариантах двигательных устройствможноиспользоватьунифицированные электродвигатели-черви очень простой конструкции (фиг. 1-3). Это позволяет строить на базе этих двигателей самые различные двигательные и робото- технические системы. Расширенные функциональные возможности данного двигателя позволяют использовать его в самых различных областях науки и техники. Формула изобретения 1. Линейный электродвигатель, содержащий линейный магнитопровод с обмоткой, распределенной вдоль его оси. в котором размещен деформируемый элемент, состоящий из стержня с надетой на него эластичной оболочкой, отличаю щи й- с я тем, что, с целью расширения функциональных возможностей и обеспечения герметичности, обмотка магнитопровода размещена на деформируемом элементе, стержень которого выполнен в виде гибкой трубы, эластичная оболочка выполнена замкнутой и охватывает с зазором гибкую трубу, при этом оболочка размещена на всей
поверхности гибкой трубы, а полость трубы и промежуток между гибкой трубой и замкнутой оболочкой заполнены подвижным ферромагнитным веществом. 2. Электродвигатель по п. 1, о т л и ч аю щ и и с я тем, что он снабжен электрическими разъемами, прикрепленными к оболочке у торцов гибкой трубы.
3.Электродвигатель по п. 2, о т л и ч а- 0 ю щ и и с я тем, что к одному торцевому
разъему подсоединен датчик, а к другому - кабель источника питания и управления.
4.Электродвигатель по пп. 1-3, отличающийся тем, что он снабжен по
5 крайней мере одним дополнительным деформируемым элементом, расположенным параллельно основному деформируемому элементу, и соединен с ним.
5.Электродвигатель по п. 4, о т л и ч а- 0 ю щ и и с я тем, что деформируемые элементы соединены друг с другом продольными эластичными перемычками.
6.Электродвигатель по п. 4, о т л и ч а- ю щ и и с я тем, что деформируемые эле5 менты соединены друг с другом при помощи торцевых пластин, к которым прикреплены торцевые электрические разъемы.
7.Электродвигатель по п. 1, о т л и ч а- 0 ю щ и и с я тем, что он снабжен по крайней
мере одной дополнительной трубой и кинематической парой, к одному из звеньев которой прикреплена дополнительная труба, а к другому - коней деформируемого эле- 5 мента.
8.Электродвигатель по п. 7, о т л и ч а- ю щ и и с я тем, что кинематическая пара выполнена шарнирной.
9.Электродвигатель поп. 1, о т л и ч а- 0 ю щ и и с я тем, что он снабжен дополнительной гибкой трубой, открытой с обоих торцов охватывающей деформируемый элемент и закрепленной неподвижно относительно него.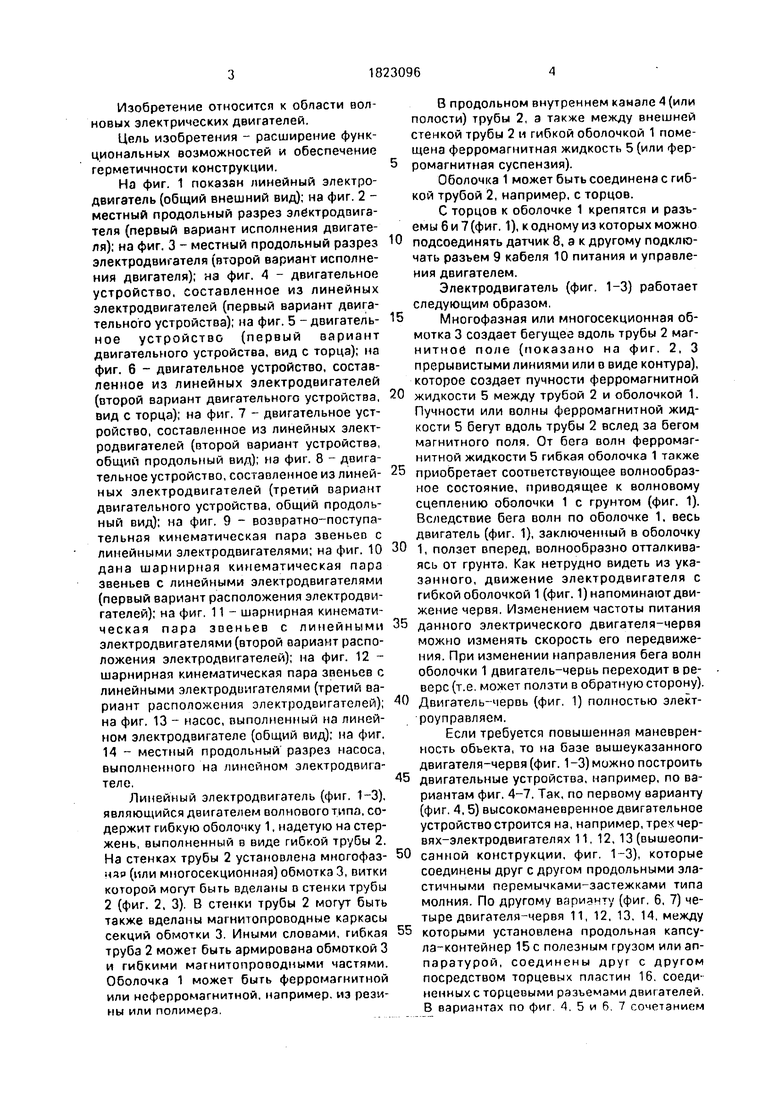


| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическое двигательное устройство | 1989 |
|
SU1697235A1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1994 |
|
RU2074491C1 |
| СПОСОБ ПЕРЕДВИЖЕНИЯ УСТРОЙСТВА (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237590C2 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2184028C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| Индуктор асинхронного электродвигателя | 1982 |
|
SU1083304A1 |
| СПОСОБ ВВЕДЕНИЯ КАБЕЛЯ ВНУТРЬ ФЕРРОМАГНИТНОЙ ТРУБЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572802C1 |
| ЛИНЕЙНЫЙ ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2002 |
|
RU2222091C1 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СИСТЕМА | 2017 |
|
RU2752456C2 |
| ЭЛЕКТРОНЕФТЕКАЧАЛКА | 2006 |
|
RU2308615C1 |



Изобретение относится к электромашиностроению и может быть использовано в автоматизированном электроприводе. Целью изобретения является расширение функциональных возможностей и обеспечение герметичности. Устройство состоит из замкнутой гибкой оболочки 1, закрепленной на гибкой трубе 2, на которой размещена многофазная коаксиальная обмотка 3. Полость 4 трубы 2 промежуток между гибкой оболочкой 1 и гибкой трубой 2 заполнен подвижной ферромагнитной средой 5, например феррожидкостью. Гибкая оболочка 1 и подвижная среда 5 образуют деформируемую часть устройства. Оболочка 1 должна располагаться на какой-либо поверхности, которая будет представлять статор устройства. При подаче питания на обмотку 3 создается бегущее вдоль гибкой трубы 2 электромагнитное поле, которое, в свою очередь, создает волны в гибкой оболочке 1 за счет пучностей в ферромагнитной подвижной среде 5. Волны деформации перемещаются по гибкой оболочке 1 вдоль трубы 2 синхронно с магнитным полем. Поскольку гибкая оболочка 1 лежит на поверхности, являющейся статором устройства, то оболочка 1 вместе с трубой 2 будет север шать линейное перемещение как единое целое. Устройство может перемещаться по поверхности любой формы, что расширяет его функциональные возможности и обладает герметичностью за счет размещения всей конструкции в замкнутой оболочке. 8 з.п. ф-лы, 14 ил. Ё
ю
А
Фис.1
2 5 J
II
гг it ог 91
fftncb
/ .
ж
/ ц
1гпф
Т 91
/
.
950CZ6L
и
& //
/
-
/ /
згпсь
-1} 2Г1ф
26
Фиг. 10
//
Фиг.11
32 25 го Я
/ / /
Фиг. 12
м
Ы
If
б м
11
it
Фиг.12
ФигЛ
| Волновой электродвигатель | 1971 |
|
SU609188A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электродвигатель | 1987 |
|
SU1577005A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
