Изобретение относится к электромеханике, преимущественно к орбитальным электромеханическим системам торцевого типа, находящих применение преимущественно в приводах промышленных роботов с торцевыми электродвигателями (дискового типа), т. е. к многофункциональным многороторным электромеханическим преобразователям, имеющим общую магнитную систему и ряд роторов, оси которых разнесены по замкнутой орбите.
Известны орбитальные системы, содержащие дисковые роторы, взаимодействующие с магнитным полем, которое создается в кольцевом воздушном зазоре магнитных систем [1] . Недостатком данного устройства является возможность его использования только с двухполюсными роторами.
К заявляемому изобретению по совокупности существенных признаков наиболее близка орбитальная электромеханическая система, содержащая обмотки полюсов, установленные на сердечниках, снабженная блоком коммутации обмоток полюсов и датчиком положения вращающегося основания, выход которого соединен с входом блоком коммутации обмоток, при этом полюса выполнены в виде радиально расположенных сердечников, а роторы выполнены в виде дисков с осями, расположенными перпендикулярно оси вращения вращающегося основания [2].
Недостатком данного устройства являются его низкие массогабаритные показатели, вызванные большим воздушным зазором, который в свою очередь обусловлен цилиндрическим характером рабочей плоскости модульной магнитной системы, кривизна которой не совпадает с плоскостью дискового якоря, кроме этого, недостатком является необходимость наличия большого числа сердечников для организации полюсных зон (минимум 12 у двигателей шестиполюсного исполнения).
Изобретение направлено на упрощение конструкции, повышение надежности орбитальной электромеханической системы.
Это достигается тем, что орбитальная электромеханическая система промышленного робота, содержащая вращаемое основание, установленные на нем роторы торцевых электродвигателей и кольцевые концентрические магнитные системы, взаимодействующие с роторами, снабжена четырьмя кольцевыми концентрическими магнитными системами с плоской рабочей поверхностью, при этом две внутренние магнитные системы выполнены секционированными.
Достижение технического результата - упрощение конструкции, повышение надежности - обусловлено тем, что внешние и внутренние магнитные системы выполняются обычного типа, применяемого в торцевых асинхронных электродвигателях, они имеют секционированные обмотки, но несекционированный магнитопровод, в отличие от двух внутренних магнитопроводов.
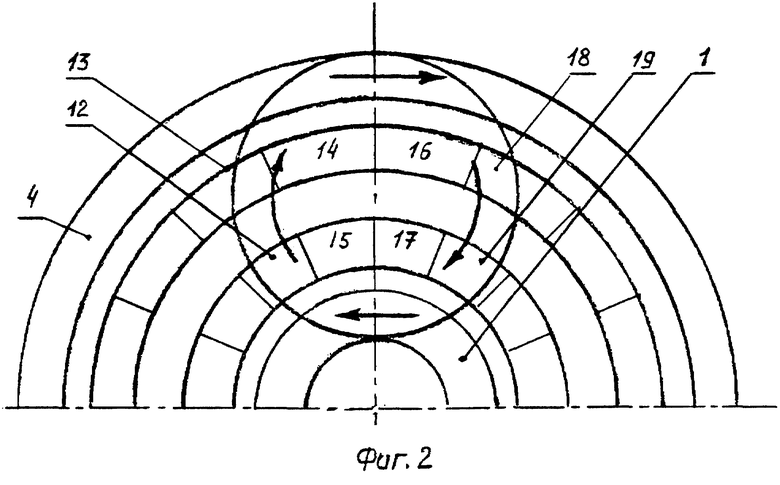
Сущность изобретения иллюстрируется чертежами, где на фиг.1 изображена орбитальная электромеханическая система промышленного робота с торцевыми двигателями, разрез в вертикальной диаметральной плоскости, на фиг.2 показано расположение в плане четырех концентричных магнитопроводов с наложением зоны диска ротора, вид сверху.
Орбитальная электромеханическая система, т.е. многоэлементный, многороторный, многофункциональный электромеханический преобразователь, в данном случае торцевого типа, содержит внутреннюю магнитную систему 1, концентрично расположенные секционированные магнитные системы 2 и 3 и внешнюю магнитную систему 4, выполненную по типу магнитной системы 1 и отличающуюся от нее лишь диаметром. Все магнитные системы содержат секционированные обмотки с лобовыми частями 5. Торцевые асинхронные электродвигатели имеют дисковый ротор (диск) 6, выполненный, как обычно, в виде ферромагнитного диска с пазами, пазы залиты алюминием. Диск соединен с редуктором 7 посредством вала 8. Совокупность дисков укреплена на вращающемся основании 9, которое, в свою очередь, вращается в подшипнике, закрепленном на центральной опоре 10. Центральная опора 10 и магнитные системы 1, 2, 3, 4 закреплены на общем основании 11. Магнитные системы 2 и 3 секционированы по своей длине, т.е. составляющие их элементы выполнены в виде сегментов 12, 15, 17, 19 и т.д. для магнитной системы 2 и сегментов 13, 14, 16, 18 и т.д. для магнитной системы 3. Имеется также стандартная система управления роботом, датчик поворота и коммутатор секций.
Устройство работает следующим образом. Рассмотрим для примера вариант с вращением диска по часовой стрелке - см. фиг.2. При этом, как показано на фиг. 2, направление вращения магнитного поля во внешней магнитной системе 4 совпадает с направлением вращения диска, т.е. по часовой стрелке. Направление вращения магнитного поля в магнитной системе 1 противоположное, т.е. против часовой стрелки относительно центральной опоры 10. Что же касается магнитных систем 2 и 3, то у них задействованы лишь радиальные сегменты, координаты которых определяются габаритами диска 6 и положением вращающегося основания 9, контролируемым датчиком положения (поворота робота). Так, например, для случая, показанного на фиг.2, сегменты 12 и 13 коммутируются таким образом, что электромагнитное поле перемещается от центра к периферии, а сегменты 18 и 19 - в противоположном направлении. Таким образом, для диска 6 существует четыре зоны перемещения магнитного поля: верхняя и нижняя стрелки, расположенные в зоне диска на фиг.2, обусловлены действием систем 4 и 1 и правая и левая стрелки обусловлены действием сегментов 18, 19 и 12, 13 магнитных систем 2 и 3. В результате диск 6 приходит во вращение и посредством вала 8 вращает редуктор 7, который далее через кинематическую связь приводит во вращение то или иное звено промышленного робота. При реверсе направление коммутации рассмотренных четырех зон меняется на противоположное. Аналогичная картина будет наблюдаться и для всех остальных двигателей, установленных на основании 9.
Введение данной орбитальной электромеханической системы упрощает конструкцию внешней 4 и внутренней 1 магнитных систем, которые выполняются несекционированными в магнитном отношении, т.е. обычного типа. Кроме того, секционированность внутренних магнитных систем 2 и 3 допускает относительно малое число секций, обусловленное лишь габаритами диска, что вполне может быть реализовано технологически.
Источники информации:
1. Авторское свидетельство СССР 1465305 / А.М. Литвиненко. Промышленный робот / опубл. Б. И. 10, 1989, В 25 J 11/00, заявка 4198381/31 -08 от 24.02.87.
2. Авторское свидетельство СССР 1459921 / А.М. Литвиненко. Промышленный робот / опубл. Б.И. 7, 1989, В 25 J 11/00, заявка 4224478/31-08 от 08.04.87.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМЕХАНИЧЕСКАЯ ОРБИТАЛЬНАЯ СИСТЕМА ТОРЦЕВОГО ТИПА | 2001 |
|
RU2184029C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ТОРЦЕВОГО ТИПА | 2001 |
|
RU2190518C1 |
| СИСТЕМА ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПРОМЫШЛЕННОГО РОБОТА | 2001 |
|
RU2182534C1 |
| ОРБИТАЛЬНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ СИСТЕМА | 2001 |
|
RU2206954C2 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2217856C2 |
| ВОЛНОВОЙ ОРБИТАЛЬНЫЙ ПРИВОД | 2001 |
|
RU2213894C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| ОРБИТАЛЬНЫЙ ШАГОВЫЙ МОТОР-РЕДУКТОР | 2001 |
|
RU2215358C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ВИНТОВОЙ ПРИВОД | 2001 |
|
RU2190791C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
Изобретение относится к приводам промышленных роботов с торцевыми электродвигателями. Система содержит вращаемое основание, установленные на нем роторы торцовых электродвигателей и четыре кольцевые концентрические магнитные системы с плоской рабочей поверхностью, взаимодействующие с роторами. При этом две внутренние магнитные системы выполнены секционированными. Изобретение позволит упростить конструкцию, повысить надежность системы. 2 ил.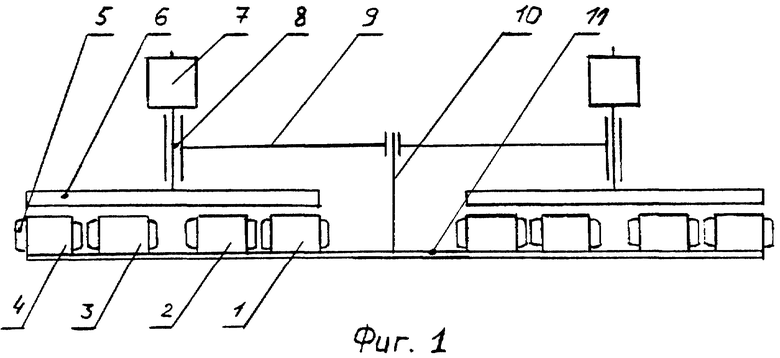
Орбитальная электромеханическая система промышленного робота, содержащая вращаемое основание, установленные на нем роторы торцевых электродвигателей и кольцевые концентрические магнитные системы, взаимодействующие с роторами, отличающаяся тем, что она снабжена четырьмя кольцевыми концентрическими магнитными системами с плоской рабочей поверхностью, при этом две внутренние магнитные системы выполнены секционированными.
| Промышленный робот | 1987 |
|
SU1465305A1 |
| Промышленный робот | 1987 |
|
SU1459921A1 |
| ОРБИТАЛЬНЫЙ МОТОР-РЕДУКТОР | 1994 |
|
RU2071631C1 |
| US 4067998, 26.08.1986. | |||
