Изобретение относится к геофизическим исследованиям скважин и предназначено для определения формы и размеров скважин и подземных полостей, заполненных жидкостью.
Цель изобретения - повышение точности определения размеров скважины за счет уверенного выделения сигнала в направлении оси чувствительности акустического преобразователя.
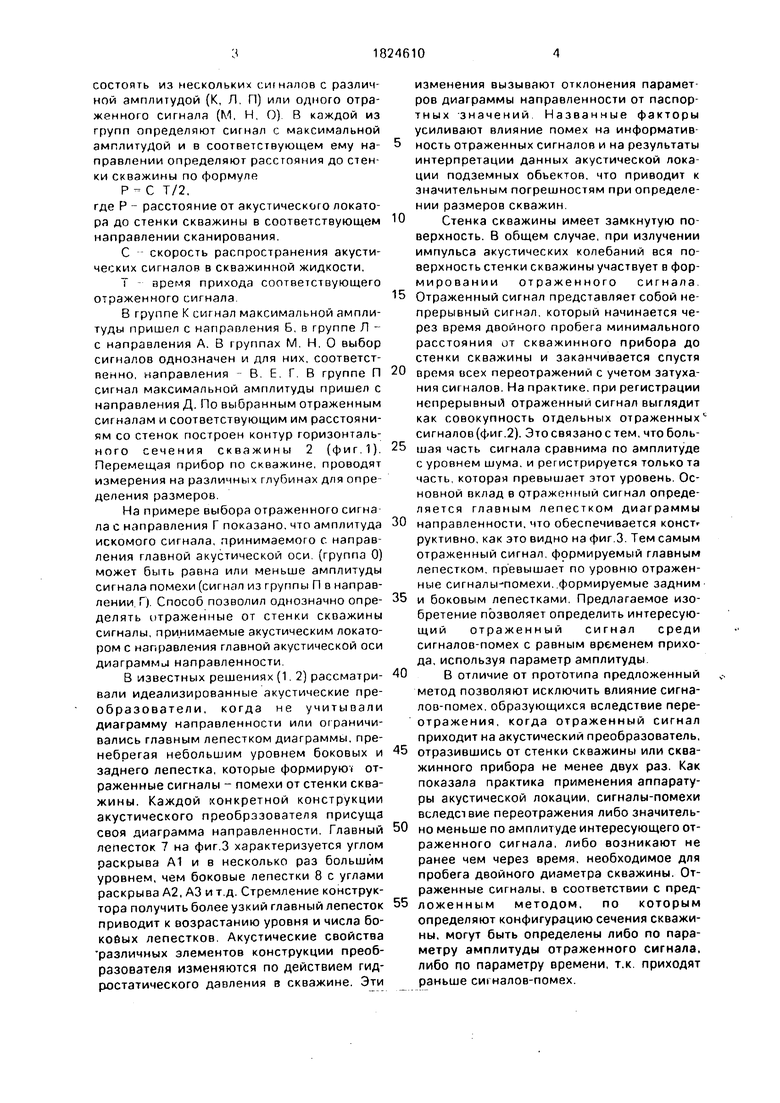
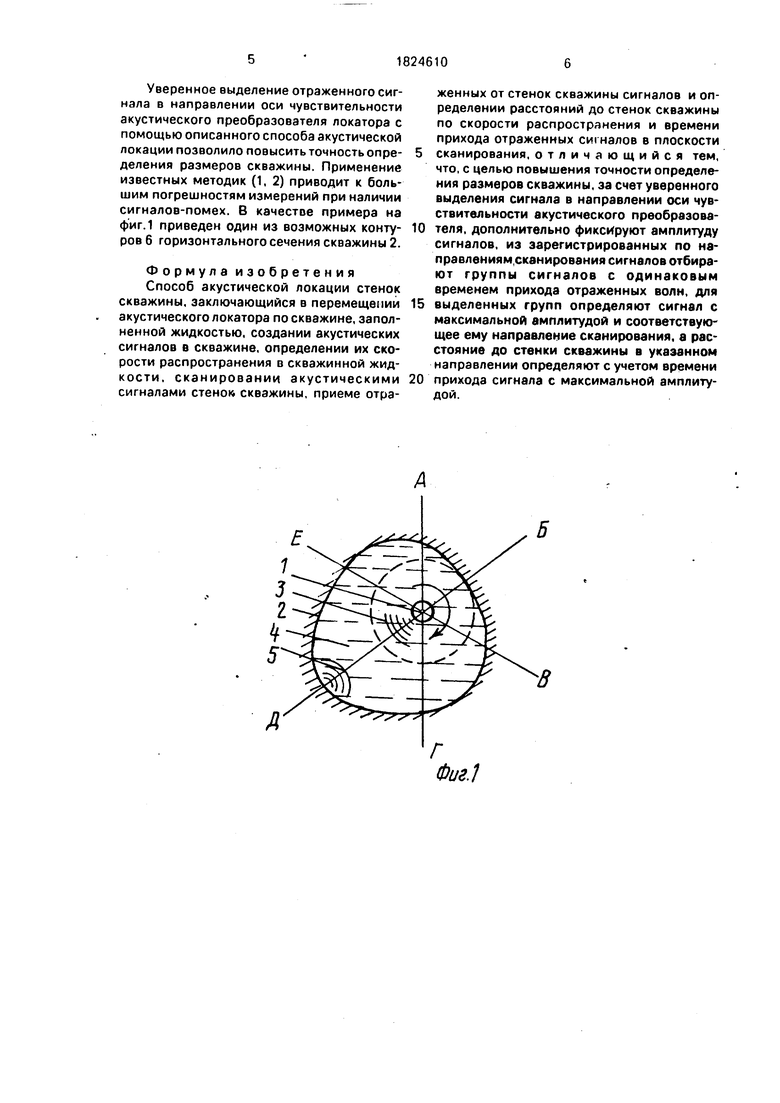
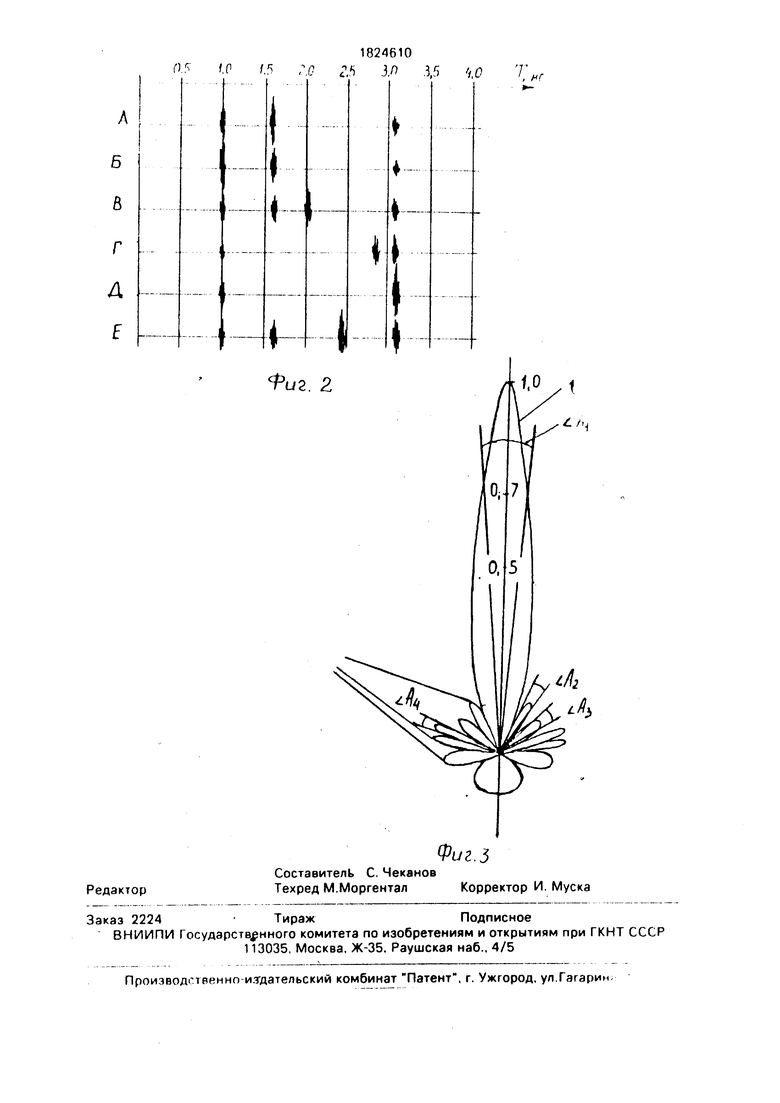
На фиг.1 изображен поперечный разрез скважины с направлениями сканирования А-Е. На фиг.2 изображены временные трассы для отраженных сигналов, принятые по каждому из направлений сканирования А- Е. На фиг.З изображена диаграмма направленности акустического локатора в плоскости сканирования.
Сущность изобретения заключается в следующем. Акустический локатор 1 (фиг.1) в горизонтальной плоскости сканирования
(плоскость рисунка) на определенной глубине в скважине 2 создает в известном направлении акустические сигналы 3 в жидкости 4. Эти сигналы 3 распространяются в жидкости и отражаются от стенки скважины 2. Отраженные сигналы 5 принимает акустический локатор 1. Сканирование стенки скважины в горизонтальной плоскости происходит при создании акустических сигналов 3 акустическим локатором 1 в различных известных направлениях. Каждая из временных трасс отраженных сигналов (фиг.2) соответствует известному направлению А-Е. Определяют время прихода и амплитуду всех отраженных сигналов. Время прихода определяют между излучаемым сигналов в начале каждой трассы и отраженным сигналом.
Среди отраженных сигналов определяют группы сигналов с одинаковым временем прихода К-П (фиг.2). Группа может
ё
,00
N
о о
состоять из нескольких сигналов с различной амплитудой (К, Л П) или одного отраженного сигнала (М, Н, О) В каждой из групп определяют сигнал с максимальной амплитудой и в соответствующем ему направлении определяют расстояния до стенки скважины по формуле
Р- С Т/2,
где Р расстояние от акустического локатора до стенки скважины в соответствующем направлении сканирования.
С скорость распространения акустических сигналов в скважинной жидкости,
Т время прихода соответствующего отраженного сигнала
В группе К сигнал максимальной амплитуды пришел с направления Б. в группе Л - с направления А. В группах М, Н. О выбор сигналов однозначен и для них, соответственно, направления - В Е Г В группе П сигнал максимальной амплитуды пришел с направления Д. По выбранным отраженным сигналам и соответствующим им расстояниям со стенок построен контур горизонтального сечения скважины 2 (фиг 1) Перемещая прибор по скважине, проводят измерения на различных глубинах для определения размеров
На примере выбора отраженного сигна ла с направления Г показано, что амплитуда искомого сигнала, принимаемого с направления главной акустической оси (группа 0) может быть равна или меньше амплитуды сигнала помехи (сигнал из группы П в направлении Г) Способ позволил однозначно определять отраженные от стенки скважины сигналы, принимаемые акустическим локатором с направления главной акустической оси диаграмма направленности
В известных решениях (1 2) рассматривали идеализированные акустические преобразователи, когда не учитывали диаграмму направленности или ограничивались главным лепестком диаграммы, пренебрегая небольшим уровнем боковых и заднего лепестка, которые формирую) отраженные сигналы - помехи от стенки скважины. Каждой конкретной конструкции акустического преобразователя присуща своя диаграмма направленности. Главный лепесток 7 на фиг 3 характеризуется углом раскрыва А1 и в несколько раз большим уровнем, чем боковые лепестки 8 с углами раскрыва А2, A3 и т д. Стремление конструктора получить более узкий главный лепесток приводит к возрастанию уровня и числа боковых лепестков Акустические свойства различных элементов конструкции преобразователя изменяются по действием гидростатического давления в скважине. Эти
изменения вызывают отклонения параметров диаграммы направленности от паспортных значений Названные факторы усиливают влияние помех на информативность отраженных сигналов и на результаты интерпретации данных акустической локации подземных обьектов. что приводит к значительным погрешностям при определении размеров скважин
0Стенка скважины имеет замкнутую поверхность. В общем случае, при излучении импульса акустических колебаний вся поверхность стенки скважины участвует в фор- мировании отраженного сигнала
5 Отраженный сигнал представляет собой непрерывный сигнал, который начинается через время двойного пробега минимального расстояния от скважинного прибора до стенки скважины и заканчивается спустя
0
время всех переотражений с учетом затухания сиг налов. На практике, при регистрации непрерывный отраженный сигнал выглядит как совокупность отдельных отраженных сигна лов (фиг.2). Это связано с тем, чтоболь5 шая часть сигнала сравнима по амплитуде с уровнем шума, и регистрируется только та часть которая превышает этот уровень Основной вклад в отраженный сигнал определяется главным лепестком диаграммы
0 направленности, что обеспечивается конст руктивно, как это видно на фиг 3 Тем самым отраженный сигнал формируемый главным лепестком, превышает по уровню отраженные сигналы помехи. формируемые задним
5 и боковым лепестками Предлагаемое изобретение позволяет определить интересующий отраженный сигнал среди сигналов-помех с равным временем прихода, используя параметр амплитуды
0в отличие от прототипа предложенный
метод позволяют исключить влияние сигналов-помех, образующихся вследствие переотражения, когда отраженный сигнал приходит на акустический преобразователь,
5 отразившись от стенки скважины или скважинного прибора не менее двух раз. Как показала практика применения аппаратуры акустической локации, сигналы-помехи вследствие переотражения либо значитель0 но меньше по амплитуде интересующего отраженного сигнала, либо возникают не ранее чем через время, необходимое для пробега двойного диаметра скважины. Отраженные сигналы, в соответствии с пред5 ложенным методом, по которым определяют конфигурацию сечения скважины, могут быть определены либо по параметру амплитуды отраженного сигнала, либо по параметру времени, т.к приходят раньше CHI налов-помех.
Уверенное выделение отраженного сигнала в направлении оси чувствительности акустического преобразователя локатора с помощью описанного способа акустической локации позволило повысить точность опре- деления размеров скважины. Применение известных методик (1, 2) приводит к большим погрешностям измерений при наличии сигналов-помех. В качестве примера на фиг.1 приведен один из возможных конту- ров 6 горизонтального сечения скважины 2.
Формула изобретения Способ акустической локации стенок скважины, заключающийся в перемещении акустического локатора по скважине, заполненной жидкостью, создании акустических сигналов в скважине, определении их скорости распространения в скважинной жидкости, сканировании акустическими сигналами стенок скважины, приеме отраженных от стенок скважины сигналов и определении расстояний до стенок скважины по скорости распространения и времени прихода отраженных CHI налов в плоскости сканирования, отличающийся тем, что, с целью повышения точности определения размеров скважины, за счет уверенного выделения сигнала в направлении оси чувствительности акустического преобразователя, дополнительно фиксируют амплитуду сигналов, из зарегистрированных по направлениям сканирования сигналов отбирают группы сигналов с одинаковым временем прихода отраженных волн, для выделенных групп определяют сигнал с максимальной амплитудой и соответствующее ему направление сканирования, а расстояние до стенки скважины в указанном направлении определяют с учетом времени прихода сигнала с максимальной амплитудой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| Способ локации целей | 2023 |
|
RU2814430C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ УЛЬТРАЗВУКОВЫХ ИЗОБРАЖЕНИЙ СТРУКТУР И СОСУДОВ ГОЛОВНОГО МОЗГА | 2002 |
|
RU2232547C2 |
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НИЗКОЛЕТЯЩИХ КРЫЛАТЫХ РАКЕТ МОРСКОГО БАЗИРОВАНИЯ | 2009 |
|
RU2422852C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| Способ селекции эхо-сигналов в эхолоте | 2017 |
|
RU2649070C1 |
| СПОСОБ ЛОКАЦИИ | 2005 |
|
RU2296350C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2720043C1 |
Использование в геофизических исследованиях скважин при определении формы и размеров скважин и подземных полостей. Сущность изобретения, скважинный локатор осуществляет сканирование поверхности скважины по заданным направлениям. Фиксируют время прихода отраженных волн, а также направление прихода сигнала с максимальной амплитудой среди сигналов, имеющих одинаковое время. По выявленному направлению сканирования определяют расстояние до стенки скважины с учетом времени прихода сигнала симальной амплитудой. 3 ил.
1824610
1 ГО М З.п ч w г
,
Фиг. 2
, иг
| Скважинный звуколокатор | 1976 |
|
SU693305A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
