Настоящее изобретение относится к области гидроакустики, а также к области гидрографии, и может быть использовано в активных гидроакустических системах (эхолотах) при измерении глубины дна для селекции мешающих эхо-сигналов.
Для измерения глубины места под движущимся судном используют эхолоты. Известно, что наличие боковых лепестков диаграммы направленности (ДН) антенны в режиме приема ухудшает помехоустойчивость эхолота. В процессе работы эхолота вблизи причальных стенок, береговой линии с сильно расчлененном рельефом дна, узкостях, судоходных каналах возможна ситуация, когда амплитуды эхо-сигналов, принятых по боковым лепесткам ДН, могут быть соизмеримы или даже больше амплитуды эхо-сигнала, принятого главным лепестком ДН антенны эхолота. Такая маскировка эхо-сигнала от дна увеличивает вероятность его пропуска и является недопустимой с точки зрения навигационной безопасности плавания. Достоверность оценки глубины эхолотом зависит от ширины главного лепестка ДН антенны эхолота и уровня ее боковых лепестков (Богородский А.В., Островский Д.Б.. Гидроакустические навигационные и поисково-обследовательские средства». - СПб.: Изд. СПБГЭТУ «ЛЭТИ», 2009. С. 90-116, Хребтов А.А. и др. Судовые эхолоты. - Л.: Судостроение,1982, с. 57-84).
Известно, что наибольшая интенсивность мешающих эхо-сигналов в работе эхолота будет иметь место при приеме по первому боковому лепестку ДН антенны. Известно также, что теоретический уровень первого бокового лепестка ДН для плоских антенн с равномерным амплитудным распределением, применение которых распространено в эхолотах, достигает около 22% от уровня основного лепестка, имеющего ширину α, и имеет направление ϕ под углом к оси главного максимума (Орлов Л.В. и др. Гидроакустическая аппаратура рыбопромыслового флота, - Л.: Судостроение, 1987, с. 65-76; Евтютов А.П., Митько В.Б. Инженерные расчеты в гидроакустике. - Л.: Судостроение, 1981, с. 17-24):
ϕ=k0α,
где k0=1.5…1.6.
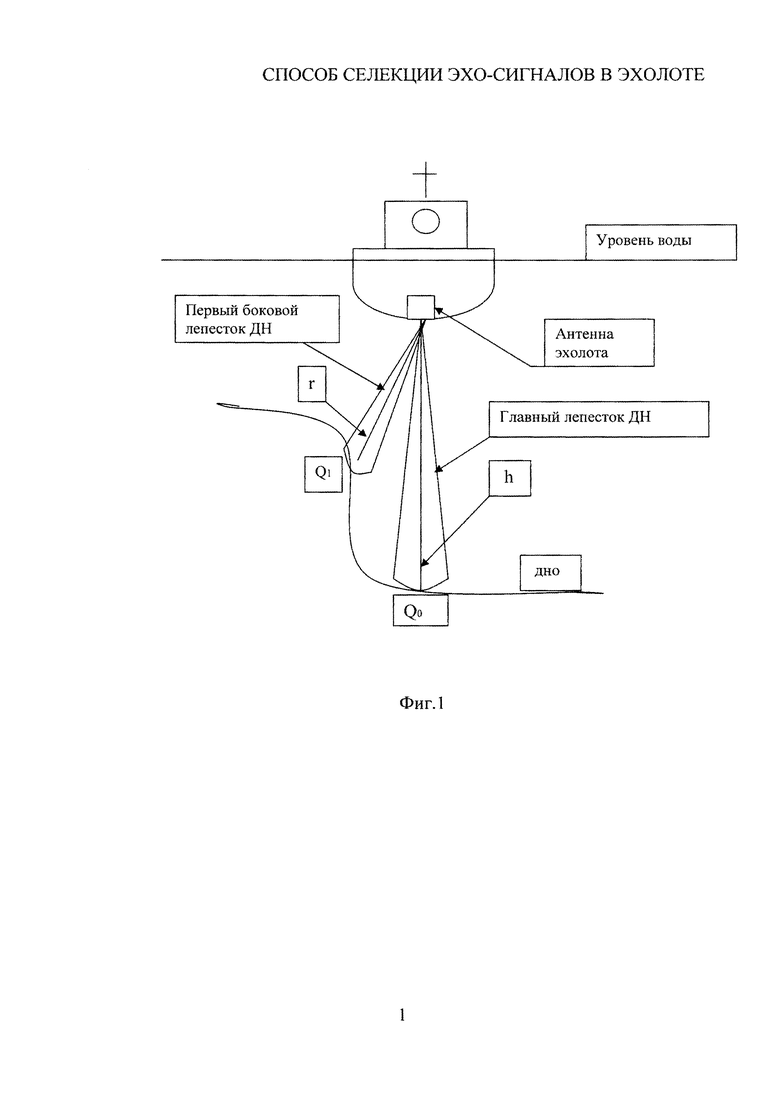
В результате, в случае сильно расчлененного рельефа дна, первым по времени будет принят эхо-сигнал не от точки прямо под антенной эхолота, а от точки дна, расположенной в направлении первого бокового лепестка ДН, амплитуда которого зависит от крутизны (ориентации) наклона дна в направлении первого бокового лепестка ДН. Если донный рельеф меняется очень быстро, то подобные ситуации встречаются часто и одна из возможных представлена на фиг. 1.
В силу отмеченных обстоятельств для обеспечения достоверного измерения глубин с помощь эхолота практический интерес представляет разработка способа селекции мешающих эхо-сигналов, обусловленных боковыми лепестками ДН антенны, в условиях, когда дно имеет сильно расчлененный рельеф.
Известен способ обработки эхо-сигналов в эхолотах (Кобяков Ю.С. и др. Конструирование гидроакустической рыбопоисковой аппаратуры. - Л.: Судостроение, 1986. С. 234-240), в котором: излучают зондирующие сигналы в воду, принимают отраженные эхо-сигналы, выполняют обнаружение и идентификацию донных эхо-сигналов с применением временной селекции с учетом информации за несколько последовательно выполненных циклов зондирования. Указанный способ позволяет производить в автоматическом режиме селекцию донных эхо-сигналов в узком диапазоне глубин (стробе), охватывающим предполагаемое местоположение донного эхо-сигнала.
Недостатком указанного способа-аналога является то, что для выработки временного положения строба селекции эхо-сигналов от дна используется информация о временном положении дна, получаемой в течение нескольких последовательных циклов зондирования и в случае не попадания эхо-сигнала от дна в строб селекции происходит пропуск измерения глубины, что весьма вероятно в условиях сильно расчлененного рельефа дна. Также недостатком является вероятность захвата стробом селекции мешающего эхо-сигнала, принятого по боковым лепесткам ДН антенны, то есть потеря эхо-сигнала от дна при больших флюктуациях амплитуды донного эхо-сигнала в условиях сильно расчлененного рельефа дна, что приводит к снижению достоверности измеренных глубин.
Известен способ селекции эхо-сигналов в эхолотах (эхолоты серии NaviSound 100, 110, 205, 210, 215, 420 фирмы RESON, www.reson.com) в котором: излучают зондирующие сигналу в воду, принимают отраженные эхо-сигналы, задают порог по минимальной измеряемой глубине (начальная блокировка), с помощью которого селектируют мешающие эхо-сигналы, которые слишком близки по дистанции к антенне эхолота и могут быть обусловлены турбулентностью водных масс и отражениями от кильватерной струи судна, выполняют временную селекцию принятых эхо-сигналов с помощью временного строба, размер которого определяется временем, в течение которого эхолот ожидает эхо-сигнал от дна, положение строба определяется на основании предыдущей измеренной глубины. Попадание эхо-сигнала в установленный временной строб является индикатором достоверности измеренной глубины, в противном случае измеренная глубина в текущем цикле зондирования считается мало достоверной. Размер временного строба выбирается в процентах от шкалы глубины и вводится пользователем эхолота.
Недостатками этого способа являются увеличенная минимальная измеряемая глубина - «мертвая зона» за счет использования начальной блокировки и возможность пропуска измеряемой глубины при больших флюктуациях амплитуды донного эхо-сигнала в условиях сильно расчлененного рельефа дна и при не попадании донного эхо-сигнала во временной строб.
Из описания известного устройства («Эхолот», патент РФ №2241242, кл. G01S 15/08, 7/52, опубл. 27.11.2004 г.), следует, что оно реализует способ селекции эхо-сигналов, наиболее близкий по количеству общих признаков с предлагаемым способом. В соответствии с этим способом в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду в направлении дна, принимают отраженные эхо-сигналы, формируют исходный цифровой массив отсчетов амплитуд эхо-сигналов, обрабатывают исходный цифровой массив отсчетов амплитуд эхо-сигналов, выделяют на всем времени приема из него путем пороговой обработки по амплитуде, по длительности, на кратность времени прихода эхо-сигналов для выявления переотраженных от дна, ряд отсчетов амплитуд эхо-сигнала с максимальной амплитудой, принимаемого за эхо-сигнал от дна, определяют, по времени, его начало для повышения точности измерения глубины, производят регулировку коэффициента усиления приемного тракта и излучаемой мощности усилителя мощности для удержания максимальной амплитуды эхо-сигнала в диапазоне от минимального до максимального допустимого уровня, отображают выделенный ряд отчетов амплитуд эхо-сигнала с максимальной амплитудой на индикаторе, получают значение скорости звука в воде, определяют время для выбранного эхо-сигнала от дна и вычисляют глубину дна. Пороговая обработка по амплитуде эхо-сигналов удаляет из дальнейшей обработки эхо-сигналы ниже установленного порога для обеспечения минимально допустимого соотношения сигнал/помеха, что снижает погрешность измерения глубины эхолотом. Пороговая обработка эхо-сигналов по длительности удаляет из дальнейшей обработки эхо-сигналы - импульсные помехи, которые по длительности меньше зондирующего импульса и тем самым повышает достоверность измеренных глубин эхолотом. Пороговая обработка эхо-сигналов на кратность времени прихода эхо-сигналов удаляет из дальнейшей обработки эхо-сигналы, являющиеся переотраженными от дна, что также повышает достоверность измеренных глубин эхолотом.
Существенным недостатком данного способа-прототипа является отсутствие селекции мешающих эхо-сигналов, принятых по боковым лепесткам диаграммы направленности антенны эхолота, и влияние эхо-сигналов, принятых по боковым лепесткам диаграммы направленности антенны эхолота на достоверность измеренных эхолотом глубин, что ухудшает помехоустойчивость эхолота и снижает достоверность измеренных глубин в районах плавания с сильно расчлененным рельефом дна. Также в случае сильно расчлененного рельефа дна, небольших глубин и дна с большим коэффициентом обратного рассеяния не все кратные эхо-сигналы будут удалены из дальнейшей обработки, что приводит к снижению достоверности измеренных глубин. Эффект влияния эхо-сигналов, принятых по боковым лепесткам диаграммы направленности антенны на результат измерения глубины, тем больше, чем шире основной лепесток диаграммы направленности используемой в эхолоте антенны и чем сильнее расчленен рельеф дна.
Задачей настоящего изобретения является повышение достоверности оценки глубины в эхолоте при измерениях в районах плавания с сильно расчлененным рельефом дна, в узкостях, вблизи причальных стенок.
Технический результат заключается в селекции мешающих эхо-сигналов, принятых эхолотом по боковым лепесткам диаграммы направленности антенны.
Для обеспечения указанного технического результата в известный способ селекции эхо-сигналов в эхолоте, в котором: в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду в направлении дна, принимают отраженные эхо-сигналы, формируют исходный цифровой массив отсчетов амплитуд эхо-сигналов, обрабатывают исходный цифровой массив отсчетов амплитуд эхо-сигналов, выделяют из него путем пороговой обработки по амплитуде и по длительности ряд отсчетов амплитуд эхо-сигнала с максимальной амплитудой, отображают выделенный ряд отчетов амплитуд эхо-сигнала с максимальной амплитудой на индикаторе, получают значения скорости звука в воде, определяют время для выбранного эхо-сигнала, вычисляют глубину, введены новые признаки, а именно: дополнительно введена селекция эхо-сигналов по двум смежным интервалам времени от 0 до Тгр и от Тгр до Тш, где Тш - временя распространения зондирующего сигнала от антенны эхолота на всю шкалу зондирования и обратно, границу между интервалами Тгр определяют по известным величинам шкалы зондирования эхолота Н, уровню первого бокового лепестка диаграммы направленности антенны эхолота G, значению коэффициента обратного рассеяния от дна в направлении главного лепестка диаграммы направленности антенны эхолота Q0 и значению коэффициента обратного рассеяния в направлении первого бокового лепестка диаграммы направленности антенны эхолота от объектов создающих мешающие эхо-сигналы Q1, по формуле

где  , с - скорость звука в воде,
, с - скорость звука в воде,
на интервале времени от ТГР до ТШ выделяют эхо-сигнал с максимальной амплитудой и принимают его за эхо-сигнал от дна, в случае отсутствия эхо-сигналов в интервале времени от ТГР до ТШ выделяют эхо-сигнал с максимальной амплитудой на интервале времени от 0 до Тгр и принимают его за эхо-сигнал от дна, в случае отсутствия эхо-сигналов в интервале времени от 0 до Тгр, не производят вычисление глубины дна.
Таким образом, временная селекция эхо-сигналов в эхолоте с учетом параметров диаграммы направленности антенны эхолота, коэффициента обратного рассеяния от дна в направлении главного лепестка диаграммы направленности антенны эхолота и коэффициента обратного рассеяния в направлении первого бокового лепестка диаграммы направленности антенны эхолота от объектов, создающих мешающие эхо-сигналы, позволяет повысить достоверность оценки глубины в эхолоте при измерениях глубины дна в районах плавания с сильно расчлененным рельефом дна, в узкостях, вблизи причальных стенок.
Поясним достижение технического результата.
Реализация данного способа поясняется на фиг. 1, на которой схематически представлен носитель с установленной антенной эхолота и часть вида ДН антенны эхолота, включающая главный и первый боковой лепестки ДН, где обозначены:
h - дистанция до дна в направлении главного лепестка ДН антенны,
причем h<=Н - шкалы зондирования,
r - дистанция до объекта (дна) в направлении первого бокового лепестка ДН антенны
Q1 - коэффициент обратного рассеяния от дна (объекта) в направлении первого бокового лепестка ДН антенны;
Q0 - коэффициент обратного рассеяния от дна в направлении главного лепестка ДН антенны.
Известно, что интенсивность эхо-сигнала при эхо-локации дна для главного лепестка ДН антенны находят по формуле 1 (Хребтов А.А. и др. Судовые эхолоты. - Л.: Судостроение, 1981, с. 70):

Интенсивность эхо-сигнала при эхолокации дна для бокового лепестка ДН антенны находят по формуле 2:

где W - уровень излучаемой акустической мощности;
γ - коэффициент концентрации антенны эхолота;
с - скорость звука в воде;
τ - длительность импульса;
Q0 - значение коэффициента обратного рассеяния от дна в направлении главного лепестка диаграммы направленности антенны эхолота;
Q1 - значение коэффициента обратного рассеяния от объектов в направлении первого бокового лепестка антенны эхолота, создающих мешающие эхосигналы;
Н - шкала зондирования эхолота;
β - коэффициент пространственного затухания на частоте работы эхолота;
G - уровень первого бокового лепестка диаграммы направленности антенны эхолота;
r - дистанция до объекта создающего мешающие эхо-сигналы работе эхолота в направлении первого бокового лепестка ДН;
При выполнении условия: Iб≥Iэ (3), то есть, если интенсивность эхо-сигнала, принятого по боковому лепестку ДН антенны, будет больше интенсивности эхо-сигнала, принятого по главному лепестку ДН антенны, то эхо-сигнал, принятый по боковому лепестку ДН антенны, будет воспринят системой обработки как эхо-сигнал от дна.
Для малых глубин, для которых актуальна навигационная безопасность плавания, и, учитывая кубичную зависимость r, множителями 100.2*β*H и 100.2*β*r можно пренебречь, тогда после преобразования неравенства (3) относительно r, с учетом формул (1) и (2), получим:

и при известной скорости звука в воде с перейдем от дистанции r (4) к граничному времени Тгр, которое принадлежит интервалу времени Тш - времени распространения зондирующего импульса от антенны эхолота на всю шкалу зондирования Н и обратно.

где 
В формуле (5) значения параметров Н и с известны, также известен уровень первого бокового лепестка диаграммы направленности G для конкретной антенны, используемой в эхолоте, значения Q0 и Q1 в общем случае неизвестны и зависят от конкретного типа грунта и рельефа в момент времени и месте измерения глубины эхолотом.
Вычисляют Тгр путем ввода предположительных значений коэффициентов обратного рассеяния от дна Q0 в направлении главного лепестка ДН и от объекта Q1 в направлении первого бокового лепестка ДН. Значения коэффициентов обратного рассеяния зависят от типа грунта на дне в месте проведения измерения глубины, а тип грунта указывается на навигационных картах для района проведения измерения глубины, а также на них указаны величины предполагаемых глубин, на основе которых выбирают шкалу зондирования Н. В районах плавания с сильно расчлененным рельефом дна, в узкостях, вблизи причальных стенок, как правило, низины затянуты ильными отложениями, а склоны представляют собой либо скальные отложения, либо выходы скальных пород, или искусственные сооружения из бетона или металла. Для достижения максимально возможной достоверности измеренной глубины и навигационной безопасности плавания следует считать дно акустически мягким с минимальным значением коэффициента обратного рассеяния, а объекты в направлении первого бокового лепестка ДН считать акустически жесткими с максимальным значением коэффициента обратного рассеяния. Согласно международному стандарту ISO9875:2000 "Морские эхолоты", стр. 13, минимальное значение коэффициента обратного рассеяния от дна следует считать равным - 25 Д6 (0.056), а максимальное значение коэффициента обратного рассеяния для акустически жестких грунтов может составлять до 6 Дб (0.4…0.5), А.В. Богородский, Д.Б. Островский. «Гидроакустические навигационные и поисково-обследовательские средства». - СПб., 2009 г., Изд. ЛЭТИ с. 95-96.
Предложенный способ реализуется следующим образом.
В каждом цикле зондирования в режиме излучения антенной эхолота излучают акустический зондирующий импульс в водную среду в направлении дна по основному и боковым лепесткам ДН. В режиме приема осуществляют прием эхо-сигналов антенной эхолота, отраженных от дна и различных объектов, в пределах диаграммы направленности антенны, формируют исходный массив амплитуд эхо-сигналов на интервале времени Тш, выделяют из него путем пороговой обработки по амплитуде и по длительности ряд эхо-сигналов, амплитуда которых больше установленного порога, а длительность больше длительности зондирующего импульса. Для селекции мешающих эхо-сигналов в эхолоте с целью повышения достоверности измеренных глубин эхолотом вводят исходные значения параметров - шкалу зонирования Н, уровень первого бокового лепестка ДН антенны G, коэффициент обратного рассеяния от дна в направлении главного лепестка ДН Q0, коэффициент обратного рассеяния в направлении первого бокового лепестка ДН Q1 от объектов, создающих мешающие эхо-сигналы, определенное ранее значение скорости звука с в воде в месте измерения глубины, по которым рассчитывают граничное время Тгр, то есть определяют границу интервала времени, в течение которого могут быть обнаружены мешающие эхо-сигналы, принятые от объектов, расположенных в направлении первого бокового лепестка ДН согласно формуле (5). Таким образом интервал времени Тш разбивается на два смежных интервала, первый от 0 до Тгр и второй от Тгр до Тш и в общем случае, после пороговой обработки эхо-сигналов по амплитуде и по длительности количество эхо-сигналов на этих интервалах времени и соотношения их амплитуд могут быть совершенно различными.
Затем из всех эхо-сигналов на интервале времени от Тгр до Тш выделяют эхо-сигнал с максимальной амплитудой Uc и принимают Uc за эхо-сигнал от дна. В случае не обнаружения даже ни одного эхо-сигнала на интервале времени от Тгр до Тш выделяют из всех эхо-сигналов на интервале времени от 0 до Тгр эхо-сигнал Uп с максимальной амплитудой, принимают эхо-сигнал Uп за эхо-сигнал от дна. Для выделенного эхо-сигнала, принятого за эхо-сигнал от дна, определяют время и, используя определенное ранее значение скорости звука в воде, вычисляют глубину дна, выводят ее значение на индикатор для оператора. В случае не обнаружения ни одного эхо-сигнала на интервале времени от 0 до Тгр не производят вычисление глубины дна.
Таким образом, в каждом цикле зондирования в исходном массиве амплитуд эхо-сигналов производят селекцию мешающих эхо-сигналов, принятых по боковым лепесткам ДН антенны, в результате повышается достоверность измеренных глубин эхолотом.
Аппаратная реализация предлагаемого способа селекции эхо-сигналов в эхолоте может быть выполнена аналогично реализации примененной в эхолоте, представленном в патенте РФ №22241242 «Эхолот». Следовательно, технический результат предлагаемого изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эхолот | 2019 |
|
RU2719210C1 |
| СПОСОБ ОБРАБОТКИ ГИДРОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2015 |
|
RU2603228C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ РЕЛЬЕФА И ОСАДКИ ПОДВОДНОЙ ЧАСТИ АЙСБЕРГА | 2016 |
|
RU2623830C1 |
| Эхолот | 2023 |
|
RU2828233C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Эхолот | 2022 |
|
RU2789812C1 |
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
Способ относится к активным гидроакустическим системам обнаружения дна и оценки его глубины и может быть использован в эхолотах для селекции мешающих эхо-сигналов. Техническим результатом изобретения является повышение достоверности оценки глубины эхолотом в каждом цикле зондирования путем селекции мешающих эхо-сигналов, принятых эхолотом по боковым лепесткам диаграммы направленности антенны. Для обеспечения указанного технического результата осуществляется селекция мешающих эхо-сигналов, принятых по боковым лепесткам диаграммы направленности путем временной селекции эхо-сигналов, из массива амплитуд эхо-сигналов, прошедших пороговую обработку исходного массива амплитуд эхо-сигналов. 1 ил.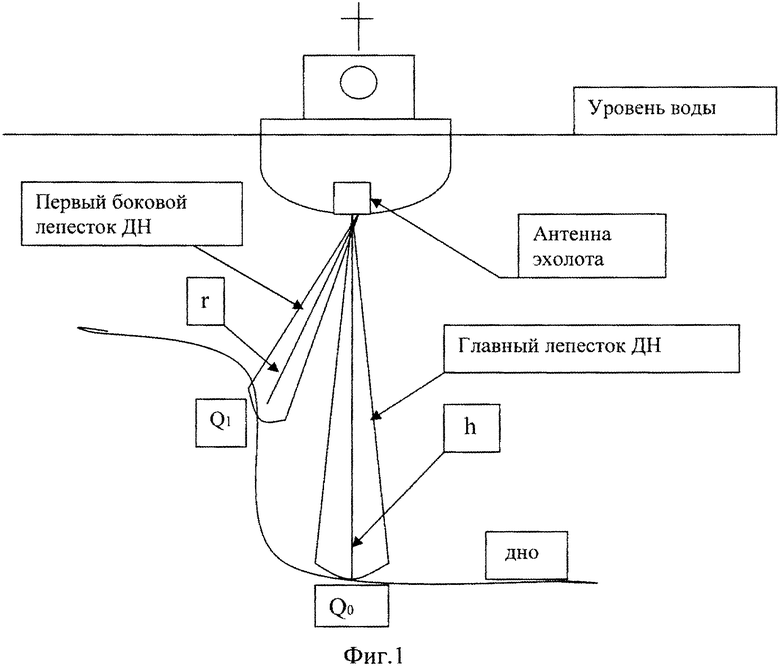
Способ селекции эхо-сигналов в эхолоте, в котором: в каждом цикле «излучение-прием» излучают зондирующие сигналы в водную среду в направлении дна, принимают отраженные эхо-сигналы, формируют исходный цифровой массив отсчетов амплитуд эхо-сигналов, обрабатывают исходный цифровой массив отсчетов амплитуд эхо-сигналов, выделяют из него путем пороговой обработки по амплитуде и по длительности ряд отсчетов амплитуд эхо-сигнала с максимальной амплитудой, отображают выделенный ряд отчетов амплитуд эхо-сигнала с максимальной амплитудой на индикаторе, получают значения скорости звука в воде, определяют время для выбранного эхо-сигнала, вычисляют глубину, отличающийся тем, что дополнительно вводят селекцию эхо-сигналов по двум смежным интервалам времени от 0 до Тгр и от Тгр до Тш, где Тш - временя распространения зондирующего сигнала от антенны эхолота на всю шкалу зондирования и обратно, границу между интервалами Тгр определяют по известным величинам шкалы зондирования эхолота Н, уровню первого бокового лепестка диаграммы направленности антенны эхолота G, значению коэффициента обратного рассеяния от дна в направлении главного лепестка диаграммы направленности антенны эхолота Q0 и значению коэффициента обратного рассеяния в направлении первого бокового лепестка диаграммы направленности антенны эхолота от объектов создающих мешающие эхо-сигналы Q1, по формуле
где:  , с - скорость звука в воде,
, с - скорость звука в воде,
на интервале времени от Тгр до Тш выделяют эхо-сигнал с максимальной амплитудой и принимают его за эхо-сигнал от дна, в случае отсутствия эхо-сигналов в интервале времени от Тгр до Тш выделяют эхо-сигнал с максимальной амплитудой на интервале времени от 0 до Тгр и принимают его за эхо-сигнал от дна, в случае отсутствия эхо-сигналов в интервале времени от 0 до Тгр, не производят вычисление глубины дна.
| ЭХОЛОТ | 2003 |
|
RU2241242C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ СИГНАЛА ОТ ЦЕЛИ | 2011 |
|
RU2473924C1 |
| ГИДРОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ, ДВИЖУЩИХСЯ С МАЛОЙ РАДИАЛЬНОЙ СКОРОСТЬЮ В КОНТРОЛИРУЕМОЙ АКВАТОРИИ, И ГИДРОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА, РЕАЛИЗУЮЩАЯ ЭТОТ СПОСОБ | 2002 |
|
RU2242021C2 |
| US 5877997 A, 02.03.1999 | |||
| US 5822275 A, 13.10.1998. | |||

