Изобретение относится к области ультразвукового (УЗ) высокоскоростного контроля дефектов в твердых телах, может преимущественно использоваться для обнаружения дефектов в рельсах железнодорожного транспорта, метрополитена и других длинномерных изделий (труб, штанг и т.п.) при высоких скоростях относительного движения между излучающе-приемной системой и контролируемым изделием. Заявляемое техническое решение рассмотрено на примере контроля железнодорожных рельсов при наклонном вводе ультразвуковых колебаний.
Требование увеличения пропускных способностей рельсового транспорта оставляет меньше времени на контроль состояния рельсов и устранение выявленных в них дефектов. Поэтому создание надежных способов высокоскоростного (близких к скоростям движения поездов, например, до 120 км/ч) контроля рельсов представляет собой актуальную задачу.
Известен способ высокоскоростного УЗ зондирования рельсов [1], заключающийся в подаче в рельс ультразвуковых зондирующих импульсов несколькими излучающими однонаправленными, наклонными электроакустическими преобразователями, получении ими отраженных ультразвуковых сигналов, совместной оценке их средством обработки, по результатам которой судят о наличии дефекта. Используя специальные приемы последовательного излучения зондирующих импульсов несколькими пьезоэлектрическими преобразователями (ПЭП), расстояние между которыми выбраны по определенному правилу, удается избежать основного ограничения эхо-метода УЗ контроля: возврата всех эхо-сигналов от возможных дефектов до следующего излучения зондирующего импульса.
Недостатком известного способа является необходимость обеспечения стабильного акустического контакта между поверхностью сканирования контролируемого изделия и ПЭП, что для высокоскоростного контроля является сложной и, в настоящее время, еще до конца не решенной проблемой. Еще одним существенным недостатком способа является использование в качестве отличительных признаков амплитудных параметров эхо-сигналов от искомого дефекта, что при высоких скоростях сканирования и нестабильном акустическом контакте является весьма недостоверным признаком.
При значительных скоростях сканирования весьма ярко проявляется известный эффект Доплера, когда частота эхо-сигнала fЭ, принимаемая от дефекта, отличается от частоты излучения УЗ колебаний f0 на величину доплеровского сдвига Fд:

где

v - скорость сканирования;
с - скорость распространения у.з. колебаний;
α - угол ввода у.з. луча в контролируемое изделие;
выбор знака между слагаемыми в (1) зависит от направления движения: при взаимном приближении ПЭП и дефекта (+), при удалении (-). Дальнейшие примеры использования эффекта Доплера рассмотрим на примере направления преобразователя в сторону приближения к дефекту (знак + в (1)).
Целесообразность использования эффекта Доплера применительно к дефектоскопии показана еще в [2]. Для дополнительного повышения помехозащищенности при переменной скорости сканирования в [3] предложено регулировать полосу пропускания приемника (точнее полосу фильтра выделения доплеровской частоты) дефектоскопа в зависимости от скорости.
Дальнейшее развитие указанного направления повышения эффективности УЗ дефектоскопии изделий при высоких скоростях сканирования получило в технических решениях [4], [5] и [6]. В этих решениях используется независимость числа периодов доплеровской частоты в эхо-сигнале конкретного дефекта от скорости [4] и возможность выделения с помощью узкополосных фильтров крайних участков доплеровского спектра [5] для определения параметров выявляемых дефектов [6]. Общим недостатком известных технических решений [3 - 6] является узкая область применения, ориентированная только на использование их при непрерывном излучении УЗ колебаний и контактном способе ввода/приема УЗ колебаний.
Более универсальным техническим решением, направленным в том числе, и на бесконтактный ввод и прием УЗ колебаний при высокоскоростном контроле изделий, является способ (система) дефектоскопии с использованием эффекта Доплера по патенту [7], в котором присутствует относительное движение между излучающе-приемным бесконтактным акустическим преобразователем (БАП) и контролируемым изделием (средой). Основная идея известного способа - выделение сигналов, имеющих доплеровский сдвиг частоты. В процессе относительного движения БАП и контролируемого изделия излучают в изделие УЗ колебания на заданной частоте под определенным углом, при известной скорости сканирования принимают отраженные сигналы, и эхо-сигналы от дефектов выделяют с учетом доплеровского сдвига частоты. Причем, на примере контроля железнодорожных рельсов показано, что увеличение скорости сканирования (скорости вагона-дефектоскопа) приводит к более выраженному эффекту Доплера и лучшей эффективности.
Недостатком способа [7], принятого за прототип, является низкая помехозащищенность, а значит и низкая достоверность результатов контроля, вызванная неполным использованием информативных параметров эхо-сигналов, получаемых при высокоскоростном сканировании.
Целью изобретения является повышение достоверности обнаружения дефектов при наличии относительного высокоскоростного движения между излучающе-приемной системой и контролируемым изделием за счет использования «тонкой» структуры УЗ эхо-сигналов от дефектов с учетом эффекта Доплера.
Техническим результатом реализации заявляемого способа является повышение достоверности обнаружения дефектов при значительных скоростях сканирования.
Для достижения этого результата в способе высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера, заключающемся в том, что в процессе относительного движения бесконтактного акустического преобразователя и контролируемого изделия излучают в изделие УЗ колебания на заданной частоте под определенным углом с известной диаграммой направленности, принимают отраженные эхо-сигналы, при известной скорости сканирования учитывают доплеровский сдвиг частоты эхо-сигналов, дополнительно, с необходимой дискретностью определяют мгновенные частоты эхо-сигналов, и по их изменению определяют наличие дефекта.
Основным отличием заявляемого способа по сравнению с прототипом является учет изменения доплеровского сдвига (частоты эхо-сигнала) с учетом угла ввода УЗ зондирующих сигналов.
В [7], не учтено, что частота эхо-сигнала зависит не только от скорости сканирования, но и от переменного (в пределах диаграммы направленности), угла ввода/приема УЗ колебаний, который, в процессе озвучивания дефекта меняется.
Заметим, что некоторые отличия в выражении для определения доплеровского смещения в прототипе, от выражения (2) в данном тексте, объясняются особенностями отсчета угла ввода УЗ колебаний в контролируемое изделие. В отечественной практике угол ввода а колебаний отсчитывается от нормали к поверхности сканирования.
Действительно, в реальных ситуациях, при любом способе возбуждения УЗ колебаний (бесконтактными лазером, электромагнитно-акустическом (ЭМА) излучением, контактным ПЭП), при приеме отраженных от внутреннего дефекта эхо-сигналов, в контролируемом изделии формируется определенная результирующая диаграмма направленности (ДН) с центральным углом ввода d0 и углом раскрытия 2ϕр. В процессе сплошного сканирования контролируемого изделия со скоростью vc, при приближении к локальному внутреннему дефекту в начальный момент времени озвучивание дефекта происходит краем ДН под углом αн = (α0+ϕр). При этом, в соответствии с (1) и (2), где α = αн = (α0 + ϕр), УЗ эхо-сигнал имеет частоту, составляющую

По мере движения БАП в зоне локации ΔХ дефекта, происходит постепенный «наезд» ДН на дефект, при этом преимущественное озвучивание дефекта происходит под углом α0, а мгновенная частота эхо-сигнала определяется выражениями (1 и 2), где α = α0.
В дальнейшем начинается «съезд» ДН УЗ луча с плоскости отражателя и озвучивание дефекта происходит под углом αк = (α0 - ϕр),

В результате частота заполнения эхо-сигналов в процессе сканирования меняется на величину

Отсюда следует очевидный вывод, что чем шире ДН (значение ϕр) БАП, тем больше девиация ΔfЭ частоты эхо-сигнала в процессе локации дефекта.
Заявляемый способ иллюстрируют следующие графические материалы:
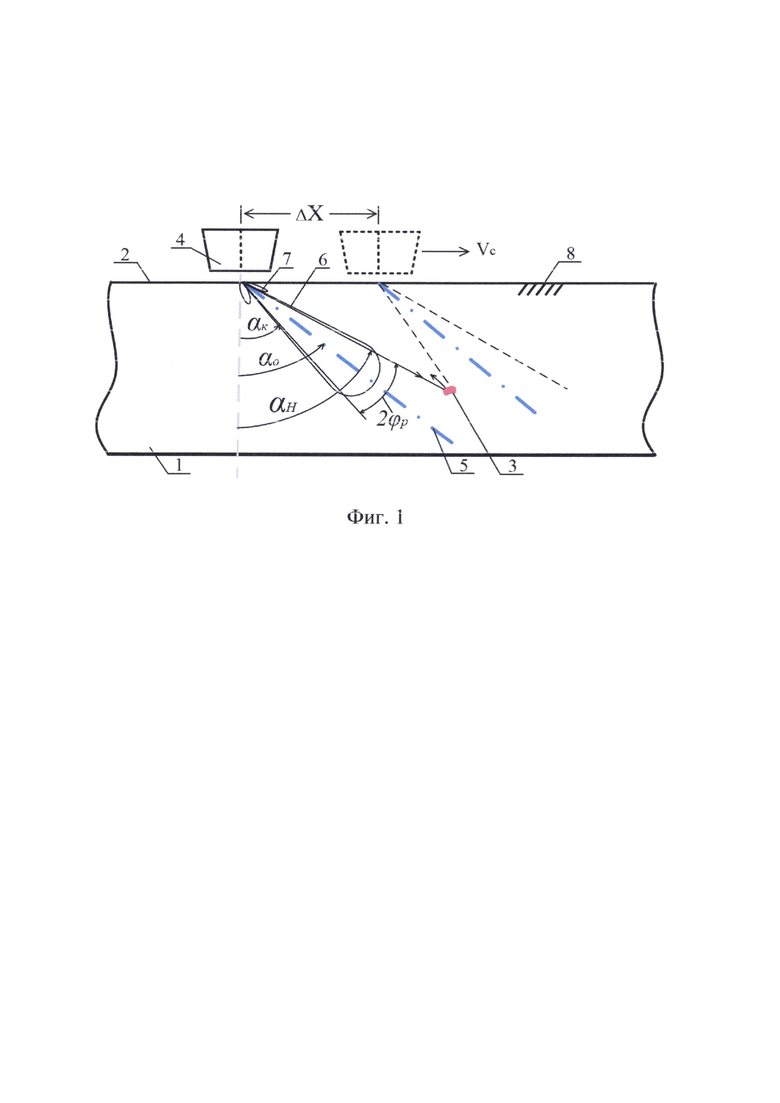
Фиг. 1 - Схема УЗ озвучивания локального дефекта наклонным БАП, где:
1. Контролируемое изделие (например, рельс).
2. Поверхность сканирования изделия.
3. Локальный дефект в изделии.
4. БАП.
5. Ось диаграммы направленности БАП.
6. Результирующая (основной лепесток) диаграмма направленности БАП.
7. Боковые лепестки ДН.
8. Поверхностные повреждения изделия.
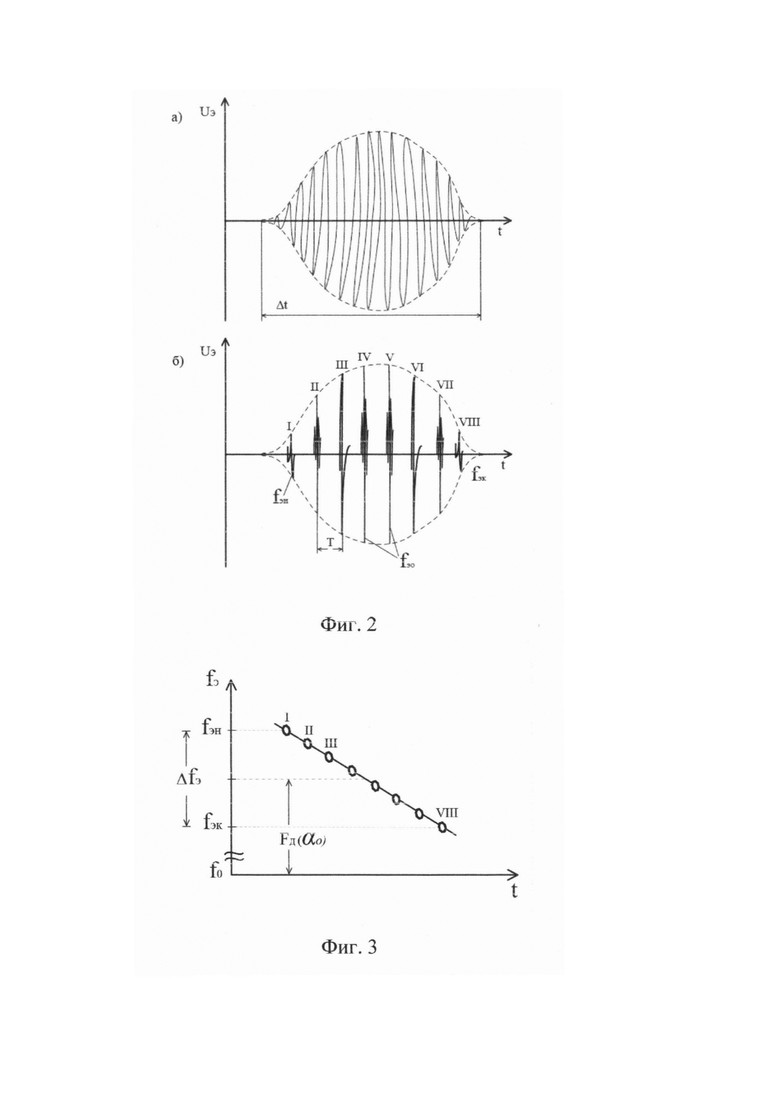
Фиг. 2. - Вид УЗ эхо-сигналов и изменение их частот при непрерывном (а) и импульсном (б) излучении УЗ колебаний, где:
Фиг. 2а - УЗ эхо-сигнал при непрерывном излучении.
Фиг. 2б - Пачка (группа) УЗ эхо-импульсов от локального внутреннего дефекта при импульсном излучении.
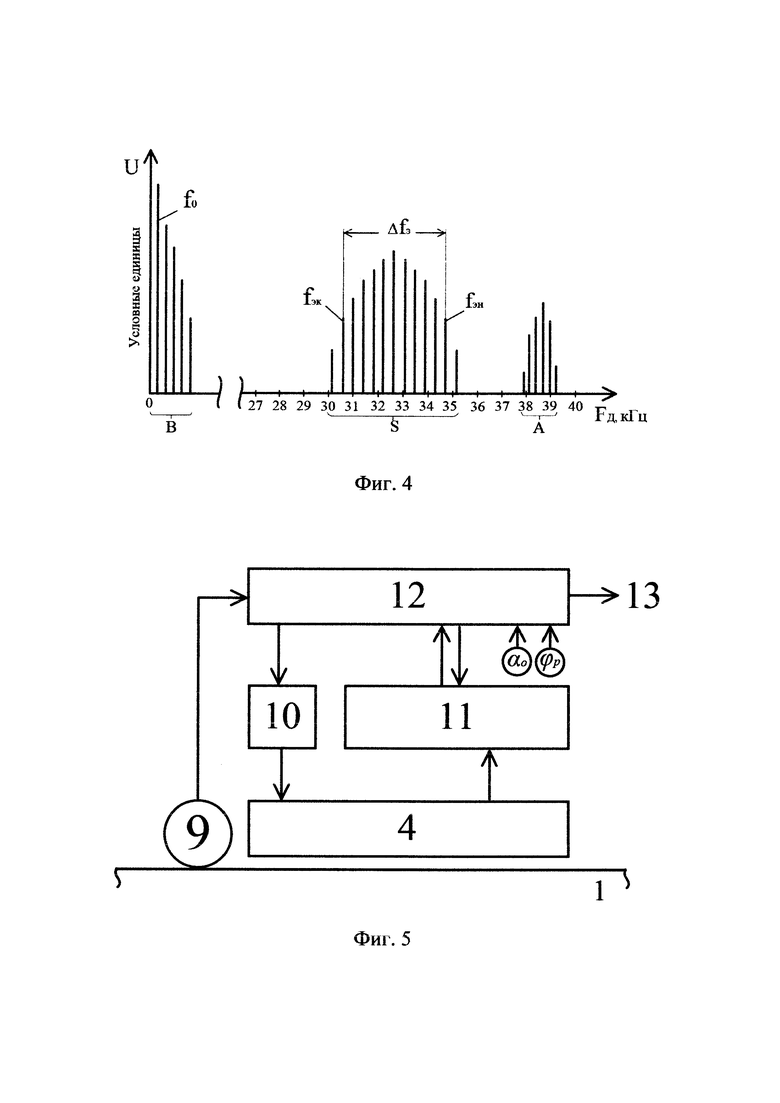
Фиг. 3 - Изменение частот заполнения УЗ эхо-сигналов при непрерывном (сплошная линия) и импульсном (кольцевые точки соответствуют эхо-импульсам с соответствующими обозначениями на Фиг. 2б) излучении УЗ колебаний.
Фиг. 4 - Размещение частотных спектров УЗ эхо-сигналов и помех на оси частот, где:
S - зона спектральных составляющих частот УЗ эхо-сигналов от внутренних дефектов;
А - спектральные составляющие частот УЗ сигналов от возможных помех (неровностей и микротрещин на поверхности сканирования) принятых боковыми лепестками ДН;
В - частотный спектр УЗ сигналов от возможных неровностей противоположной поверхности изделия, принятые боковыми лепестками ДН при углах α, близких к 0°.
Для наглядности спектр отображен на оси доплеровских частот.
Фиг. 5 - Укрупненный вариант функциональной схемы дефектоскопа для реализации заявляемого способа, где:
9. Датчик (одометр) относительного перемещения БАП 4 и контролируемого изделия 1.
10. Формирователь зондарующих УЗ сигналов (генератор зондирующих колебаний УЗ частоты).
11. Приемник эхо-сигналов.
12. Вычислитель.
13. Выход вычислителя.
Рассмотрим процесс реализации заявляемого способа высокоскоростной УЗ дефектоскопии с использованием эффекта Доплера.
Устройство, реализующее способ, состоит из последовательно соединенных датчика перемещения 9, вычислителя 12, формирователя зондирующих колебаний 10, бесконтактного акустического преобразователя 4, приемника эхо-сигналов 11, выход которого соединен с входом вычислителя 12. Управление параметрами (усиление, выбор полосы частот) приемника 11 производится вычислителем 12. Обработанные по рассмотренным алгоритмам сигналы вычислителя 12 подаются на выход 13 для дальнейшего документирования и включения дефектоотметчика (на Фиг. не показан). Построение основных узлов устройства, реализующего предлагаемый способ, очевидно и не вызывает затруднений при реализации.
БАП 4, перемещаясь со скоростью vc над сканируемой поверхностью 2 изделия 1, лазерным, ЭМА или иным способом возбуждает в контролируемом изделии 1 УЗ колебания частотой f0 с определенной диаграммой направленности 6 с центральным углом α0 и с углом раскрытия 2ϕр (Фиг. 1). В процессе перемещения БАП 4 в зоне локации дефекта 3 (Фиг. 1), в соответствии с выражениями (2), (1) и (3), меняется частота эхо-сигнала. Регистрация и учет изменения частоты УЗ эхо-сигнала (Фиг. 2) в пределах основного лепестка ДН 6 является одним из характерных признаков, позволяющим выделить в процессе обработки полезные сигналы от дефектов на фоне разнообразных помех.
К примеру, для реальных значений углов ввода (α0 = 60°), частоты излучения f0 = 2,5 МГц и ширины диаграммы направленности (ϕр = 7°), при практически реализуемых скоростях сканирования (vc = 25 м/с = 90 км/ч), и скорости распространения поперечных УЗ колебаний в контролируемом изделии (с = 3260 м/с), величина ΔfЭ, в соответствии с выражением (5), составляет около 4,67 кГц.
Своеобразная девиация частоты УЗ эхо-сигналов от дефектов в процессе сканирования характерна как для специфического и весьма редкого в дефектоскопии непрерывного излучения (Фиг. 2а), так и для традиционного импульсного (Фиг. 2б) излучения УЗ колебаний.
Таким образом, как при непрерывном, так и при импульсном УЗ излучении в зоне локации дефекта принимаются эхо-сигналы с переменной частотой заполнения. При непрерывном излучении формируется один длинный УЗ импульс (Фиг. 2а) длительностью Δt = ΔХ / vc, и с частотой заполнения, определяемой выражениями (1) и (2), где угол α меняется от αн = (α0 + ϕр) до αк = (α0 - αр). При этом изменение частоты заполнения происходит почти по линейному закону (Фиг. 3, сплошная линия).
При импульсном УЗ излучении в той же зоне локации ΔХ (Фиг. 1) в процессе сканирования от дефекта 3 принимается группа (пачка) эхо-импульсов (Фиг. 2б) [8]. Эти импульсы формируются последовательно в процессе озвучивания отражателя. Таким образом, в процессе озвучивания дефекта со скоростью сканирования vc, формирующаяся пачка сигналов имеет следующие особенности (Фиг. 3, дискретные значения обозначены римскими числами I - VIII):
- при «наезде» на дефект первые УЗ эхо-сигналы (на Фиг. 2б позиция №I) в пачке имеет частоту заполнения, определяющуюся выражением (3);
- УЗ эхо-сигналы с максимальной амплитудой (на Фиг. 2б - позиции № IV и V), формируемые осью ДН 6, имеют частоту в соответствии с выражениями (1) и (2), где α = α0 (при приближении БАП дефекту в (1) ставится знак «+»);
- при «съезде» с дефекта частота заполнения УЗ эхо-импульса (на Фиг. 2б и 3 - под № VIII) становится минимальной, определяемой выражением (4).
Например, при условной протяженности (зоны локации) локального дефекта в контролируемом изделии ΔХ = 50 мм (Фиг. 1) и при периоде посылок зондирующих импульсов Т = 250 мкс (частота посылок F = 4 кГц) в процессе сканирования на БАП поступит около восьми УЗ эхо-импульсов (N = 8):
N = Δt / Т,
где Δt = ΔХ / vc - время пробега БАП (Фиг. 2а) по зоне локации дефекта ΔХ (Фиг. 1).
При этом первые эхо-сигналы (на Фиг. 2б и 3, позиция № I) имеют частоту заполнения, определяемую выражением (3), и отличающуюся, при рассматриваемых в примере исходных данных, от значения частоты излучения f0 = 2500 кГц на величину Fд при угле (α0 + ϕр) т.е. fЭн = 2535,294 кГц (Фиг. 3). А последний эхо-импульс (на Фиг. 2б позиция № VIII), получаемый в процессе «съезда» ДН 6 с дефекта 3, в соответствии с (4): fЭк = 2530,620 кГц. В результате мгновенные частоты эхо-импульсов (Фиг. 26), получаемых от дефекта 3 в процессе сканирования, меняются почти на ΔfЭ = 5,0 кГц (точнее 4,674кГц) (Фиг. 3). Т.е. девиация частот заполнения импульсов в пачке составляет около 14% от среднего значения доплеровского сдвига Fд, что вполне достаточно для практического учета ее с целью повышения достоверности контроля.
Если рассмотреть представление частотных спектров УЗ сигналов на частотной оси, то можно видеть, что сигналы от внутренних дефектов (Фиг. 4 зона S) имеют доплеровский сдвиг и соответствующую частотную модуляцию внутри сигнала (пачки сигналов при импульсном излучении). Полосовым фильтром (на Фиг. не показан), охватывающим частоты от fЭк до fЭн (т.е. полосой пропускания равной ΔfЭ, определяемой выражением (5)), можно выделить все ожидаемые сигналы от потенциальных дефектов. По закону изменения (девиации) мгновенных частот сигналов можно производить выделение УЗ эхо-сигналов от внутренних дефектов на фоне возможных помех.
Примером таких помех могут являться отражения от поверхностных микротрещин 8 (Фиг. 1), не представляющих опасности с точки зрения нарушения прочности контролируемого изделия, при у.з. фиксации которых угол озвучивания остается постоянным.
Известно, что у любой диаграммы направленности 6 имеются и боковые лепестки 7 (Фиг. 1). И в данном случае, возможные отражения от незначительных повреждений 8 на поверхности сканирования 2 будут также формировать УЗ эхо-сигналы. Однако так как при этом угол озвучивания относительно нормали не меняется и будет близок к α = 90°, то сигналы от них хотя и имеют доплеровский сдвиг (причем, максимального значения), но не будут иметь девиацию частоты в процессе сканирования (зона А на Фиг. 4).
Аналогично, возможные отражения от противоположной поверхности контролируемого изделия (рельса) принимаемые под углом, близким к α = 0°, на частотной оси будут сосредоточены вблизи частоты излучения f0, и у них также будет отсутствовать как доплеровский сдвиг, так и девиация частоты (зона В на фиг. 4). Только сигналы от внутренних дефектов, озвучиваемые основным лепестком ДН 6 с определенным углом раскрытия (2ϕр), будут формировать УЗ эхо-сигналы (Фиг. 2б), частота заполнения которых будет меняться в зависимости от текущего угла озвучивания (Фиг. 3 и 4 - зона S). Таким образом, благодаря отслеживанию девиации частоты УЗ эхо-сигналов появляется возможность выделять сигналы от внутренних дефектов на фоне всевозможных помех. Маловероятно, также, что неизбежные в практике контроля электромагнитные помехи, воздействующие на БАП 4 и попадающие на вход приемника, будут иметь ожидаемый при текущей скорости сканирования доплеровский сдвиг и, соответствующую ДН 6, девиацию частоты ΔfЭ.
Таким образом, между совокупностью существенных признаков заявляемого устройства и достигаемым техническим результатом существует причинно-следственная связь, а именно учет изменения частоты эхо-сигналов в процессе сканирования повышает достоверность обнаружения дефектов в изделии.
Рассмотрим возможность построения устройства, реализующего заявляемый способ.
В предпочтительном варианте реализации заявляемого способа БАП 4 (Фиг. 1 и 5) может включать в себя отдельный излучатель и приемник, но может быть реализован и в совмещенном режиме. Известен целый класс методов, позволяющих осуществлять неразрушающий контроль (НК) путем бесконтактной генерации УЗ колебаний в материалах. Это широко известные и достаточно исследованные методы: емкостной, искровой и электромагнитно-акустический (ЭМА), а также методы, находящиеся в стадии интенсивной разработки: оптоакустический и радиационно-акустический. В основе всех этих методов лежат различные по своей физической сущности процессы бесконтактного возбуждения акустических колебаний в материалах. Кроме того, часть из них обладает свойством обратимости.
В качестве способа бесконтактного ввода и приема УЗ колебаний в известном решении [7] предлагаются несколько вариантов реализации, наиболее практичными из которых, по мнению автора данной заявки, являются два способа: лазерное (оптико-термическое) возбуждение УЗ колебаний и прием с помощью бесконтактного электромагнитно-акустического (ЭМА) приемника и второй вариант - ЭМА возбуждение и ЭМА прием УЗ эхо-сигналов от возможных внутренних дефектов.
Относительно широкое распространение получил ЭМА-метод [9]. Это связано с его сравнительно большими функциональными возможностями: обратимостью, способностью генерации в материалах различных типов акустических волн - продольных, сдвиговых и волн Рэлея.
Можно выделить два основных элемента конструкции ЭМА преобразователя: магнитную систему, состоящую из магнита (набора постоянных магнитов или электромагнита) и магнитопровода, формирующих поле намагничивания; индуктора, как правило, представляющего собой эллиптическую (или любой другой конфигурации) плоскую катушку индуктивности (или несколько катушек).
При больших скоростях сканирования в качестве системы намагничивания в ЭМА преобразователях можно использовать известные технические решения [10 - 12], когда полюсами электромагнитов служат колеса тележки подвижной единицы, а индуктор расположен вблизи или непосредственно под колесом в кольцевых выемках колеса.
Большей степенью дистанционности обладают способы возбуждения акустических колебаний опто-акустическим (лазерным) и радиационно-акустическим методами [13 - 15]. Отраженные от дефектов УЗ эхо-сигналы при этом могут быть зафиксированы ЭМА приемниками и обработаны предложенным выше способом с учетом доплеровского сдвига частоты и внутри-сигнальной частотной модуляции.
Выбор конкретных способов бесконтактного возбуждения/приема УЗ колебаний зависит от условий контроля, реализуемых скоростей относительного перемещения и имеющихся энергетических ресурсов (особенно для лазерного излучения). Возможные ограничения скоростей сканирования при импульсном излучении из-за значительного перемещения приемно-излучающей БАП за время распространения УЗ колебаний до искомого дефекта и обратно, могут быть скомпенсированы за счет использования много-датчиковых систем, например, аналогично [1].
Выделение эхо-сигналов с доплеровским сдвигом частоты, определение внутриимпульсной (при непрерывном излучении), или девиации частот эхо-импульсов внутри пачки сигналов (при импульсном излучении) от дефектов можно выполнить известными аналоговыми полосовыми фильтрами, частотными детекторами и логическими элементами [см., например, 16].
В современных условиях, после перевода сигналов в цифровую форму, все преобразования можно выполнить в вычислителе 12 дефектоскопа (Фиг. 5). Кроме эхо-сигналов от дефекта, принятых БАП 4 и усиленных усилителем 11, в вычислитель 12, необходимо подавать сигналы датчика 9 относительного перемещения БАП 4 и контролируемого изделия 1. Значение излучаемой генератором 10 в изделие 1 частоты f0 УЗ колебаний необходимое для последующих вычислений, известно, так как генератор 10 управляется вычислителем 12. Значения параметров α0 и ϕр результирующей диаграммы направленности 6 БАП 4 предварительно необходимо ввести в вычислитель 12. Направление движения определяется по данным датчика пути 9. Выходной сигнал 13 вычислителя 12 может быть направлен на регистратор для дальнейшего документирования с информацией о координатах дефектного сечения или на краскоотметчик..
Задачу выделения внутриимпульсной частотной девиации при непрерывном излучении УЗ колебаний можно дополнительно упростить, если предварительно выделить доплеровскую частоту. Для этого на вход радиотехнического смесителя (на Фиг. не показан) в необходимо подавать излучаемый сигнал с частотой f0, эхо-сигнал с частотой fЭ и, в результате, на выходе смесителя можно наблюдать низкочастотный сигнал FД (~ 30 - 36 кГц), содержащий (для приведенного выше примера) около 70 периодов переменной доплеровской частоты (Фиг. 2а). Эти операции можно также выполнить в вычислителе 12.
Выделение девиации частот эхо-сигналов в пачке при импульсном излучении у.з. колебаний требует дополнительных манипуляций, т.к. традиционно длительность одиночного эхо-импульса составляет всего лишь единицы мкс, что значительно меньше одного периода доплеровской частоты. Поэтому девиацию частоты, вызванную переменой угла локации дефекта по мере сканирования, предлагается оценить по результатам определения мгновенных частот эхо-импульсов.
При разработке технических решений (в 80х годах прошлого века) по патентам [2 - 6], оценка мгновенной частоты короткого (обычно, длительностью 4 -5 мкс, содержащего около 10-12 периодов УЗ частоты) эхо-импульса, представляло определенную проблему. С развитием вычислительной техники это проблема решается. В тоже время, переход к импульсному излучению с выделением доплеровской частоты эхо-сигналов позволяет существенно облегчить процесс определения глубин залегания искомых дефектов по временной задержке эхо-импульсов относительно зондирующего импульса.
Известны различные способы определения эффективной (мгновенной) частоты недетектированного радиочастотного эхо-сигнала. В частности, в соответствии с [17], эффективную частоту определяют по максимуму частотного спектра эхо-сигнала, или с использованием оконного преобразования Фурье. Однако эти способы обладают низкой помехоустойчивостью.
Наиболее практично определение эффективной частоты можно выполнить известным способом [18], предлагающим алгоритм оценки мгновенной частоты недетектированного радиочастотного эхо-сигнала на основе применения вейвлетного преобразования. При этом в пределах длительности радиоимпульса (эхо-сигнала) выбирают некоторое временное окно шириной сравнимой периодом несущей частоты. Целесообразно временное окно выбрать в зоне эхо-импульса, соответствующей максимуму амплитуды. Вейв-летная функция - это функция двух переменных, локализованная по времени и частоте, из которой путем растяжения и сжатия по временной оси можно получить базис для анализа функций. Суть вейвлет-анализа состоит в разложении анализируемого сигнала по базисным функциям с последующей визуализацией распределения частоты исследуемого процесса во временной или частотной области.
Все преобразования вейвлет-анализа производятся в вычислителе 12 дефектоскопа (Фиг. 5). Определяя мгновенные частоты всех эхо-сигналов, входящих в пачку сигналов от искомого дефекта 3 (Фиг. 1), можно проследить девиацию частоты в процессе сканирования.
Дискретность отсчета частоты эхо-импульсов в пачке сигналов при импульсном излучении УЗ колебаний определяется естественным способом -дискретность соответствует частоте посылок зондирующих импульсов (в приведенном примере при частоте посылок зондирующих импульсов 4 кГц отсчет мгновенной частоты происходит через каждые 250 мкс). При непрерывном излучении мгновенные частоты частотно-модулированного эхо-сигнала можно осуществлять с такой же дискретностью или непрерывно (в каждом периоде доплеровской частоты). Выбор дискретности отсчета зависит от желаемой точности отслеживания девиации частоты эхо-сигналов.
Естественно, приведенные конкретные значения скорости относительного движения, углов диаграммы направленности БАП, излучаемой и принимаемых частот сигналов приведены лишь для понимания принципа действия заявляемого технического решения и могут иметь значения в широком диапазоне.
Работоспособность указанных выше предложений проверена путем математического моделирования и экспериментальных исследований и не вызывает сомнений в реализации при высокоскоростном неразрушающем контроле изделий.
Заявляемый способ дефектоскопии может быть использовано не только при контроле рельсов, но и при дефектоскопии многих длинномерных изделий из ферромагнитных материалов: труб, стержней и прутков, буровых штанг, конвейерных лент, контактных проводов электрического тягового состава (электровозов, трамваев и троллейбусов) и др.
Используемый информативный признак, девиация частоты эхо-сигналов, не коррелирован с амплитудой, что обеспечивает дополнительное повышение достоверности и точности предлагаемого способа. Результаты, получаемые предлагаемым способом, не зависят от качества контролируемой поверхности и стабильности акустического контакта, что весьма важно при реализации высокоскоростной ультразвуковой дефектоскопии.
Таким образом, заявляемый способ может быть реализован, обеспечивает повышение достоверности обнаружения дефектов при значительных скоростях сканирования.
Источники информации
1. RU 2440568.
2. US 3321959.
3. SU 896550.
4. SU 998943.
5. SU 1429013.
6. SU 1527573.
7. US 6715354 B2.
8. Марков A.A., Кузнецова Е.К. Дефектоскопия рельсов. Формирование и анализ сигналов. Книга 2. Расшифровка дефектограмм. - СПб, Ультра Принт, 2014. - 326 с.
9. Муравьев В.В., Стрижак В.А., Балобанов Е.Н. К расчету параметров системы намагничивания электромагнитно-акустического преобразователя. / Измерительная техника, 2011, №1(17), с. 197-205.
10. RU 2680103.
11. RU 2653663.
12. RU 2661312.
13. Буденков Г.А. Возбуждение упругих волн в твердых телах лучом лазера вследствие термоупругого эффекта // Дефектоскопия. 1979. №2. С. 75-81.
14. RU 2381496
15. Симанчук В.И., Янисов В.В., Генерация ультразвуковых колебаний в твердых телах импульсными пучками заряженных частиц // Дефектоскопия. 1984. №3. С. 30-38.
16. RU 2133476.
17. ГОСТ 26266-90.
18. RU 2524451.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактной ультразвуковой дефектоскопии с использованием эффекта Доплера | 2019 |
|
RU2722089C1 |
| Способ высокоскоростной ультразвуковой дефектоскопии длинномерных объектов | 2021 |
|
RU2756933C1 |
| СПОСОБ ПРОВЕРКИ РАБОТОСПОСОБНОСТИ УЛЬТРАЗВУКОВОГО ДЕФЕКТОСКОПА | 2004 |
|
RU2262101C1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ИЗДЕЛИЙ С ЭКВИДИСТАНТНЫМИ ПОВЕРХНОСТЯМИ | 2020 |
|
RU2725705C1 |
| СПОСОБ МНОГОКАНАЛЬНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2023 |
|
RU2809185C1 |
| Способ оценки работоспособности дефектоскопических средств при высокоскоростном контроле рельсов | 2021 |
|
RU2753810C1 |
| Способ ультразвукового контроля зоны болтовых стыков рельсов | 2022 |
|
RU2791145C1 |
| Способ ультразвукового контроля локальных участков рельсов | 2023 |
|
RU2823665C1 |
| Ультразвуковой дефектоскоп | 1986 |
|
SU1388789A1 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
Использование: для высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера. Сущность изобретения заключается в том, что в процессе относительного движения бесконтактного акустического преобразователя и контролируемого изделия излучают в изделие ультразвуковые колебания на заданной частоте под определенным углом с известной диаграммой направленности, принимают отраженные эхо-сигналы, при известной скорости сканирования учитывают доплеровский сдвиг частоты эхо-сигналов, при этом с необходимой дискретностью определяют мгновенные частоты эхо-сигналов и по их изменению определяют наличие дефекта. Технический результат: повышение достоверности обнаружения дефектов при значительных (до 120 км/ч и выше) скоростях сканирования. 5 ил.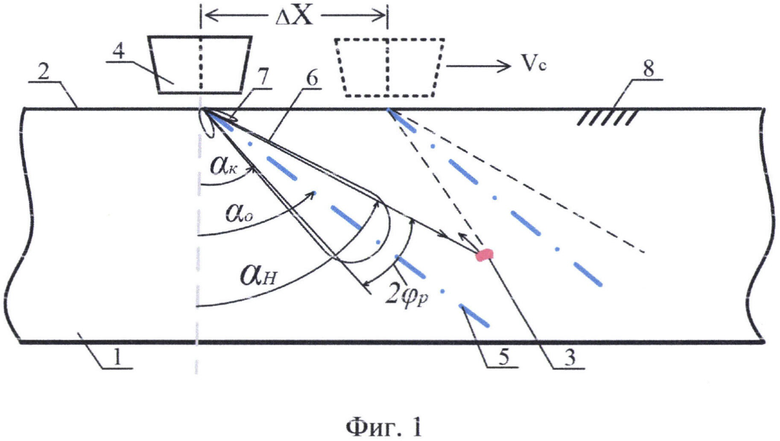
Способ высокоскоростной ультразвуковой дефектоскопии с использованием эффекта Доплера, заключающийся в том, что в процессе относительного движения бесконтактного акустического преобразователя и контролируемого изделия излучают в изделие ультразвуковые колебания на заданной частоте под определенным углом с известной диаграммой направленности, принимают отраженные эхо-сигналы, при известной скорости сканирования учитывают доплеровский сдвиг частоты эхо-сигналов, отличающийся тем, что с необходимой дискретностью определяют мгновенные частоты эхо-сигналов и по их изменению определяют наличие дефекта.
| US 6715354 B2, 06.04.2004 | |||
| Способ ультразвукового контроля изделий | 1987 |
|
SU1429013A1 |
| Ультразвуковой дефектоскоп | 1979 |
|
SU896550A1 |
| Способ ультразвукового контроля изделий | 1987 |
|
SU1527573A1 |
| US 2012279308 A1, 08.11.2012. | |||

