Изобретение относится к робототехнике и может быть использовано для отработки первоначальных профессиональных навыков при подготовке операторов, осуществляющих программирование перемещений промышленных технологических роботов методом обучения путем ручного перемещения рабочего органа робота вдоль заданной траектории, а также для оценки качества задания программы перемещений, например, при сварке, окраске, нанесении покрытий и т.п.
Цель изобретения - упрощение тренажера, обеспечение безопасности оператора при сложении за программной траекторией и повышение точности оценки качества задания программы перемещений за счет измерения фактических значений отклонений рабочего органа за допустимые пределы.
Использование предложенных элементов позволяет исключить сложное устройство для задания программной траектории, движущееся в пространстве, а также осуществлять регистрацию и измерение фактических значений отклонений рабочего органа робота за допустимые пределы. Это существенно отличает предлагаемое изобретение от прототипа, так как упрощает тренажер и повышает безопасность оператора при работе на нем. Повышается также точность оценки качества задания программы перемещений рабочего органа робота.
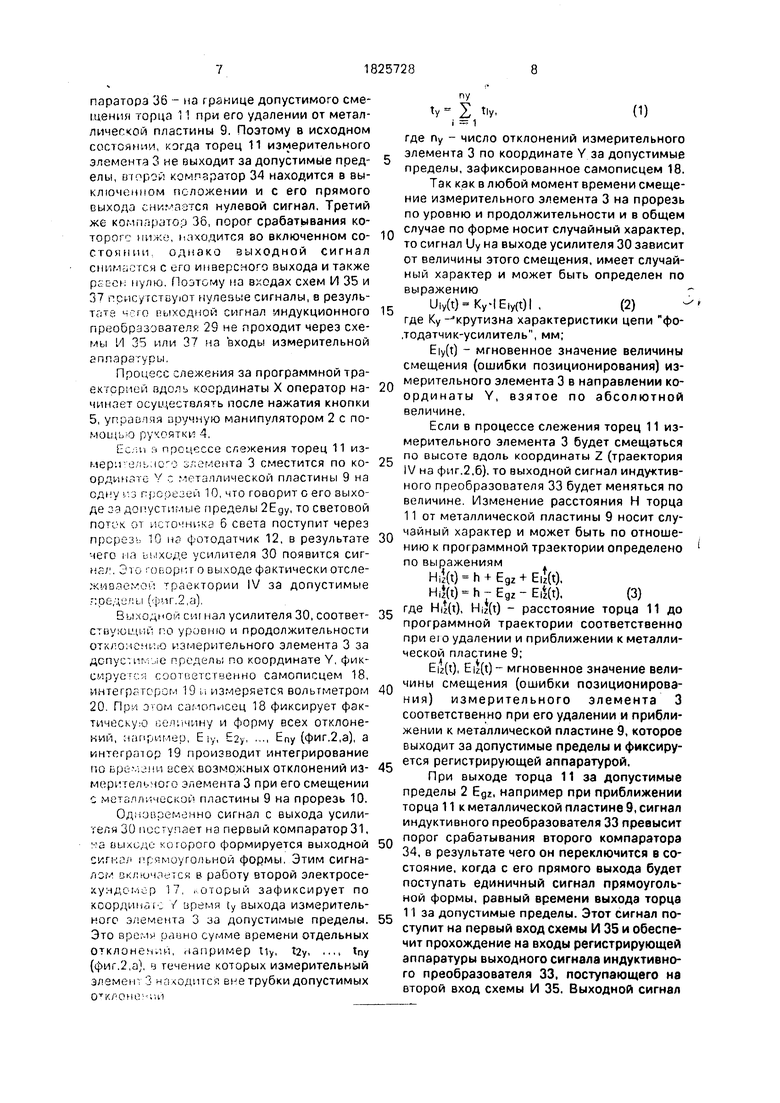
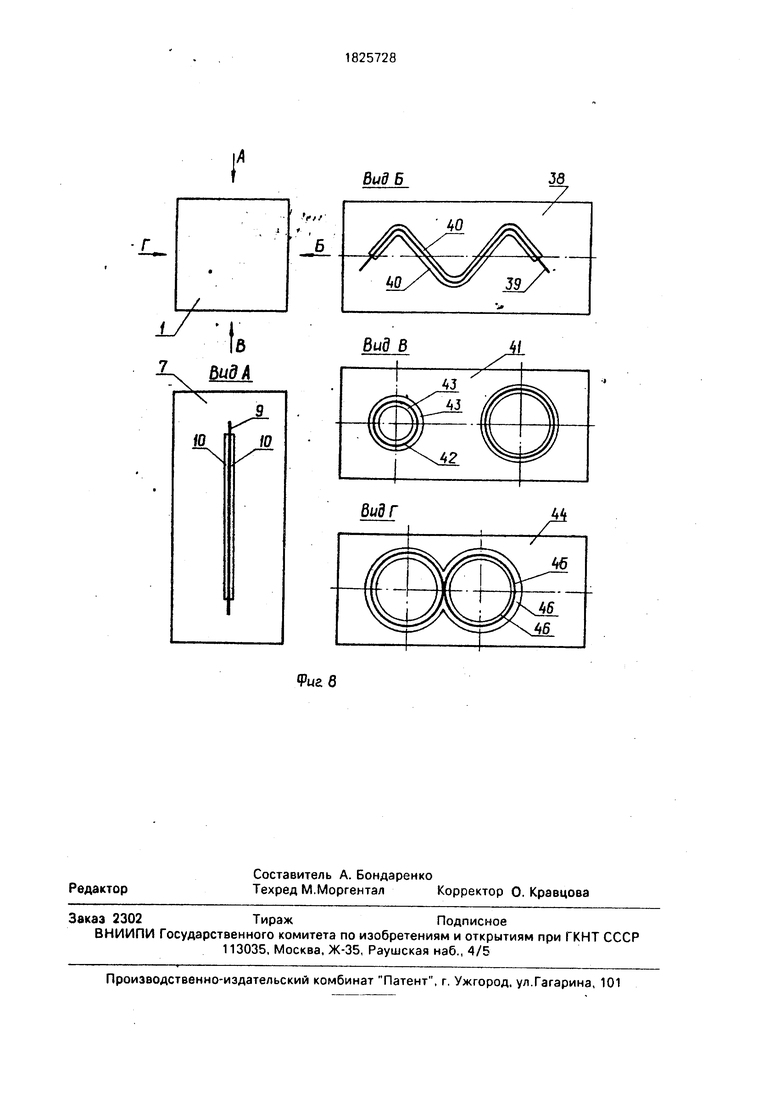
На фиг.1 приведена схема допустимых отклонений рабочего органа робота по координатам Y, Z при слежении вдоль координаты X; на фиг.2 - схема образования ошибок по координате Y (а) и координате Z (б) при слежении вдоль координаты X; на фиг.З - общий вид тренажера; на фиг.4 - устройство для задания программной траектории; на фиг.5 - измерительный элемент; на фиг.6 - блок-схема тренажера; на фиг.7 - блок-схема согласующего устройства; на фиг.З - набор шаблонов с программными траекториями.
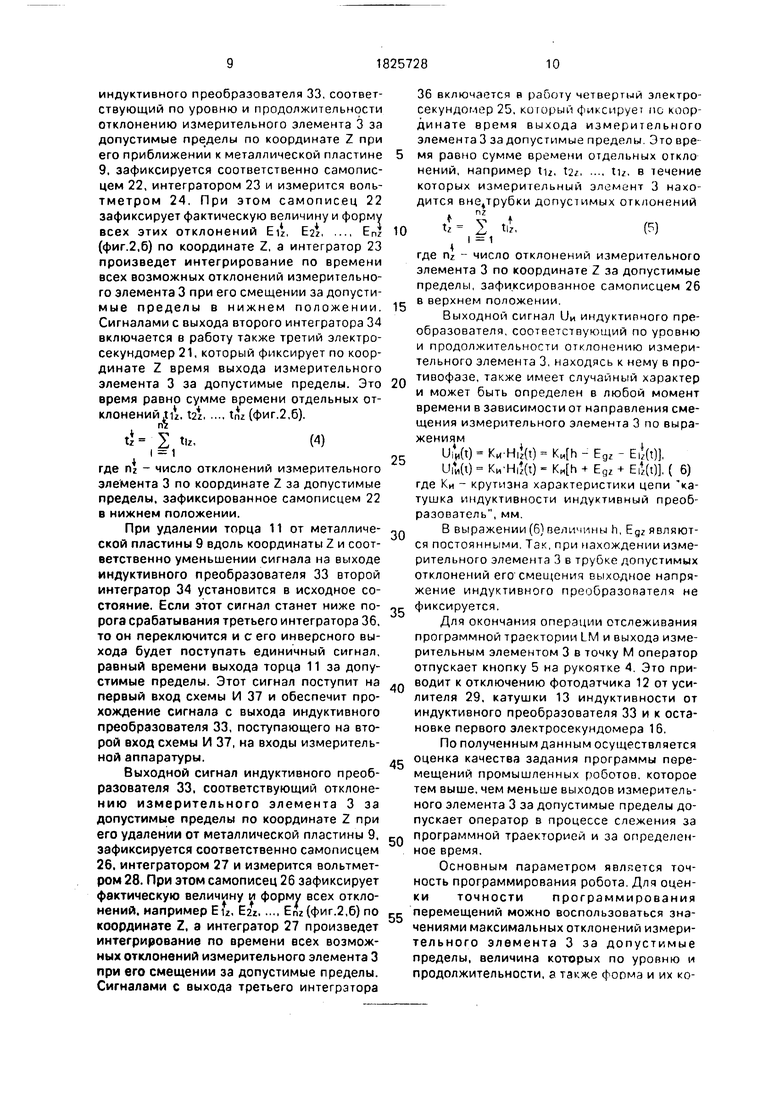
Тренажер для подготовки операторов и оценки качества задания программы перемещений содержит устройство 1 для задания программной траектории, контрольный манипулятор 2 с уравновешенным кинематическим механизмом, на конечном звене которого установлен измерительный элемент 3. Для ручного перемещения кинематического механизма контрольного манипулятора 2 на его конечном звене расположена рукоятка 4 с кнопкой 5 включения в работу тренажера. Устройство 1 для задания программной траектории представляет собой установлзнную на основании многогранную призму, внутри которой расположен источник 6 света (например, лампа дневного света). Грани призмы являются шаблонами, например шаблон 7, из светонепроницаемого материала, под которыми расположены матовые светопроницаемые фильтры 8. На шаблоны нанесены имитаторы программных траекторий в виде металлической пластины из ферромагнитного материала, которые ограничены по форме и
длине с доух сторон прорезями для прохождения света от источника 6. Так, на шаблоне
7программная траектория-представлена прямой линией 9 и соответствующими прорезями 10.
Измерительный элемент 3 выполнен в
виде круглого стержня, торец 11 которого изготовлен из ферромагнитного материала.
8центре нижней части торца 11 установлен фотодатчик 12, а в выточке по окружности
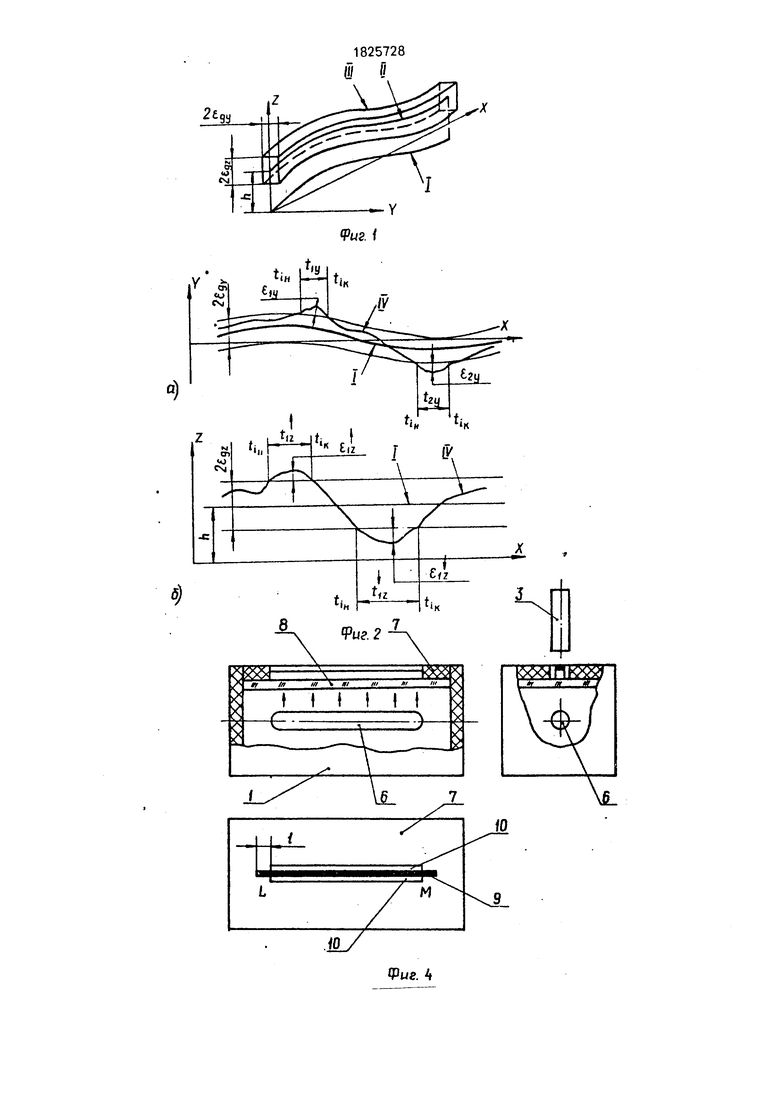
торца 11 - катушка 13 индуктивности. Фотодатчик 12 подключен к первому входу, а катушка 13 индуктивности - к второму входу согласующего устройства 14, третий вход которого связан с выходом кнопки 5.
Регистрирующая аппаратура 15 содержит первый электросекундомер 16, который подключен к выходу кнопки 5. Вход кнопки 5 связан с источником питания. В состав регистрирующей аппаратуры 15 входят второй электросекундомер 17, первый самописец 18, последовательно соединенные первые интегратор 19 и вольтметр 20, третий электросекундомер 21, второй самописец 22, последовательно соединенные
вторые интегратор 23 и вольтметр 24, четвертый электросекундомер 25, третий самописец 26, последовательно соединенные третьи интегратор 27 и вольтметр 28. Выходы с первого по шестой согласующего устройства 14 подключены соответственно к входам второго электросекундомера 17, первых самописца 18 и интегратора 19, третьего электросекундомера 21, вторых самописца 22 и интегратора 23, четвертого
электросекундомера 25, третьих самописца 26 и интегратора 27 регистрирующей аппаратуры.
Согласующее устройство 14 содержит последовательно соединенные первый
ключ 29, усилитель 30 и первый компаратор 31, выход которого является первым выходом согласующего устройства 14. Второй выход согласующего устройства 14 является выходом усилителя 30. Первый вход первого
ключа 29 подключен к выходу фотодатчика 12. В состав согласующего устройства 14 входят также последовательно соединенные второй ключ 32, индуктивный преобразователь 33, агорой компаратор 34 и первая
схема И 35, а также последовательно соединенные третий компаратор 3G и вторая схе ма И 37 Выход второго компаратора 34 является третьим выходом а выход первой схемы И 35 - четвертым выходом согласующего устройства 14 Входы третьего компаратора 36 и вторых входов схем И 35 и 3 7 подключены к выходу индуктивного преобразователя 33 Выход третьего компаратора 36 является пятым выходом, а выход второй схемы И 37 - шестым выходом согласующего устройства 14.Первый вход второго ключа 32 подсоединен к выходу катушки индуктивности 13. а вторые входы ключей 29 и 32 связаны с выходом кнопки 5
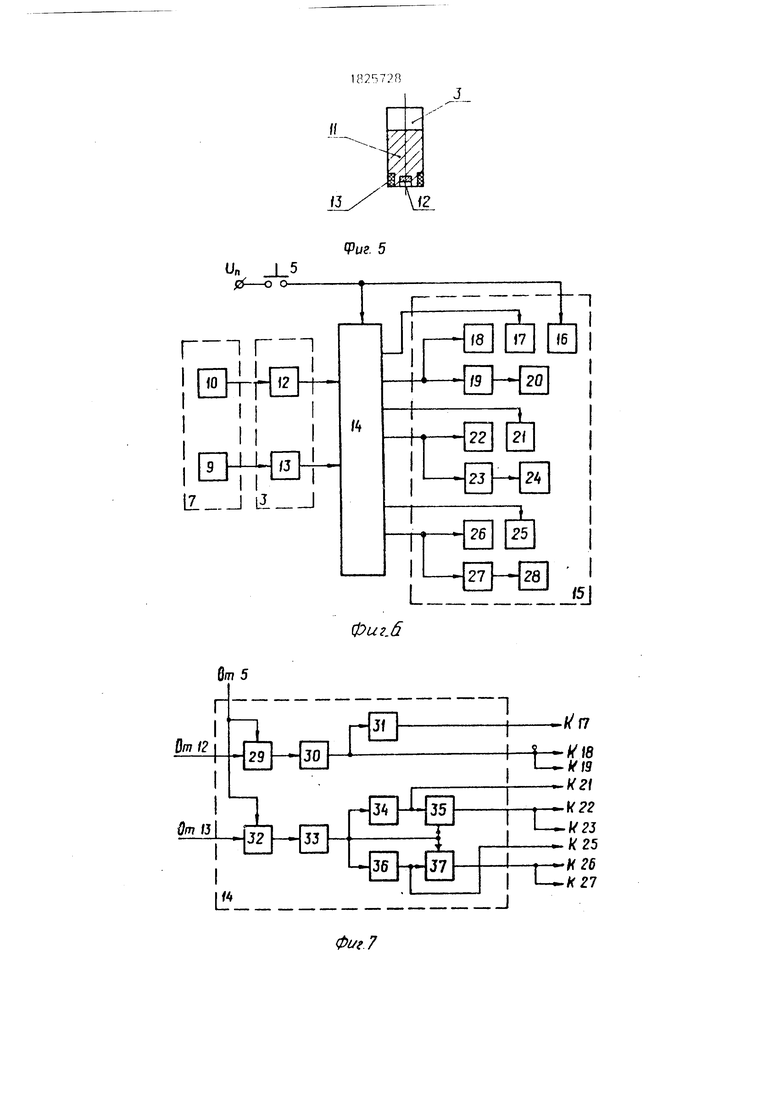
Кроме шаблона 7 (вид А, фиг.8) с программной траекторией в виде прямой линии 9 и прорезей 10 в устройство 1 задания программной траектории могут входить другие шаблоны. Например, шаблон 38 (вид Б) содержит металлическую пластину 39 в виде синусоиды и прорезей 40, шаблон 41 (вид В) - металлические пластины 42 в виде кругов разного диаметра и прорезей 43, а шаблон 44 (вид Г) - металлическую пластину 45 в виде восьмерки и прорезей 46..
Тренажер работает следующим образом.
Первый этап. Первоначальная отработка профессиональных навыков по программированию движений рабочего органа робота методом обучения путем перемещения измерительного элемента, установленного на выходном авене промышленного робота, вдоль заданной программной траектории.,
Для этого оператор устанавливает в горизонтальное положение необходимый шаблон устройства 1 задания программной траектории, начиная с наиболее простой траектории (шаблон 7) - прямой линии (фиг.З). Затем с помощью рукоятки 4 перемещает руку контрольного манипулятора 2 и выводит в исходное положение измерительный элемент 3, устанавливая его верти- кально на начальном участке I металлической пластины 9 (фиг.4). При этом оператор выбирает требуемое положение конца измерительного элемента 3 по высоте, которое, например, при программировании робота для сварки равно вылету электрода пэ(фиг.1) по отношению к заданному положению I линии соединения. Затем оператор подводит измерительный элемент в окрестность начальной точки L заданной траектории LM и осуществляет отслеживание этой траектории вдоль координаты X несколько раз, стараясь не выходить за трубку III допустимых отклонений, которая, например, для синусоидальных траекторий
II принрд(5на на (J пг 1 и сое 7 к гп кпир,п,инате V и f ,, nn к тли i жииани 1 заданной i ич nrv p,ii ip 5 осущег, i н) разнн гм ,шгтч , мясь поддерживать скорость по
СТОЯ
Затем оператор последовательно vf тя- 0 навливает шабпоны 38 41 и 44 с бопрр пож- ными программными траекториями синусоида 39, круг 4 дирметрч ьогьг орка 45 и осу1чрстя-т«р- т i-v о течг ванне
5Второй этап Оценка качеств t
программы перемещении псе ч- г гипюре . - ния первоначальных навыков по програм мированию промышленных рт ботов методом обучения.
0Для этогоопераюр кти и ч пргл дущем
случае, устанавливает измерите,и мни чле мент 3 в окрестность начальн и точки Lпрограммной траектории I М тa не (Juno смещения его торца 11 за допустимы0 пред5 елы Затем оператор нажимает кнопку 5 на рукоятке 4, в результате чего напряжение Un от источника питания поступит на пючи 2° и 32 согласующего устрог т .л ние сработают и подключ 11 г т илгт п, ,
0 фотодатчик 12 измеритсл noir трме.п (фиг 5) к усилителю 30, a c.-irviKy 13 ьд тивности - к индуктивному преОопаЛ о те- лю 33 (фиг.6 и 7). С помощью кнопки г включается в работу также -, и кг ро г - ундп
5 мер 16 измерительной эппарат ри 15 кото рый считывает общее время г чюлнемия операции отслеживания программнт тгэ
0 ектории
Если в момент подключения Фотог гчи ка 12 и катушки 13 индуктивности торец 11 измерительного элемента 3 находится в допустимых пределах то состояния всех, т/к15 ментов согласующего устройства тренажера соответствуют исходному В этом случае фотодатчик 12 расположен например металлической пластины 9 е смещен на прорези и на выходе усилителя ЗП и кпмпа0 ратора 31 сигнал равен НУЛЮ На Вокоце индуктивного преобразователи 33 присутствует постоянный сигнал, величина котопою зависит от расстояния катушки 13 индуктивности до металлической пластины 9 Этот
5 сигнал поступает на входы второю 1 и третьего 36 компараторов При приСпиже нии торца 11 к металлической п,пет,-не 9 выходной сигнал индуктивною i ov piV вателя 33 увеличивается, а при /1ririHM торца 11 уменьшается. Порог г.ерскп.о |РНИЯ второго компаратора 34 выбран на границе допустимого смещения торцй 11 i-.м-р, тельного элемента 3 при его приг и к металлической пластине в ..1 ч
паратора 36 - на границе допустимого смещения горца 11 при его удалении от металлической пластины 9. Поэтому в исходном состоянии, когда торец 11 измерительного элемента 3 не выходит за допустимые пределы, второй компаратор 34 находится в выключенном положении и с его прямого выхода CHiwasicn нулевой сигнал. Третий же компгфатоэ 36, порог срабатывания ко- торогс ниже, находится во включенном состоянии однако выходной сигнал снимается с иго инверсного выхода и также ptcch нулю. Поэтому на входах схем И 35 и 37 присутствуют нулевые сигналы, в результате и-:го выходной сигнал индукционного преобразователя 29 не проходит через схемы И 35 или 37 на входы измерительной аппаратуры.
Процесс слежения за программной траекторией вдоль координаты X оператор начинает осуществлять после нажатия кнопки 5, управляя вручную манипулятором 2 с помощью рукоятки 4.
EC..II л процессе слежения торец 11 из- Mepire ib.icro элемента 3 сместится по ко- ординдте V металлической пластины 9 на одну ..з гтрсоилей 10, что говорит с его выходе за допустимые пределы 2Еду, то световой поток, от источника 6 света поступит через прорез - 10 на фотодатчик 12, в результате чего па ьыхиде усилителя 30 появится сиг- на/1. Это говорит о выходе фактически отсле- хмвяемо-Г: траектории IV за допустимые :родеп.и (.2,a).
Выходной сиг нал усилителя 30, соответствующий по уровню и продолжительности отклонению измерительного элемента 3 за допуск пг-.-ле пределы по координате Y, фик- смруег-.;; соответственно самописцем 18, интегратором 19 и измеряется вольтметром 20. Прч Э ом самописец 18 фиксирует фактическую величину и форму всех отклонений, например, Ely, Е2у Епу (фиг.2,а), а
интегратор 19 производит интегрирование но времени ocex возможных отклонений из- меригелочого элемента 3 при его смещении с металлической пластины 9 на прорезь 10.
Одновременно сигнал с выхода усилителя 30 поступает на первый компаратор 31, а выходе которого формируется выходной сигнал прямоугольной формы. Этим сигнал-ом включается в работу второй электросекундомер 17, ,оторый зафиксирует по координат. / время ty выхода измерительного элемента 3 за допустимые пределы. Это врем равно сумме времени отдельных отклонении, например Ну, t2y, ..,, iny (фиг.2,а), в течение которых измерительный элеме г 3 находится вне трубки допустимых отклоне-пи
пу ty 2 tly.
i 1
(1)
5
где ny - число отклонений измерительного элемента 3 по координате Y за допустимые пределы, зафиксированное самописцем 18. Так как в любой момент времени смещение измерительного элемента 3 на прорезь по уровню и продолжительности и в общем
случае по форме носит случайный характер, то сигнал Uy на выходе усилителя 30 зависит от величины этого смещения, имеет случайный характер и может быть определен по выражению
Uiy(t)-KylEiy(t)l,(2)
где Ку - крутизна характеристики цепи фо- .тодатчик-усилитель, мм;
Eiy(t) - мгновенное значение величины смещения (ошибки позиционирования) изQ мерительного элемента 3 в направлении ко- ординаты Y, взятое по абсолютной величине,
Если в процессе слежения торец 11 измерительного элемента 3 будет смещаться
С- по высоте вдоль координаты Z (траектория IV на фиг.2,б), то выходной сигнал индуктивного преобразователя 33 будет меняться по величине. Изменение расстояния Н торца 11 от металлической пластины 9 носит слуQ чайный характер и может быть по отношению к программной траектории определено 1 по выражениям
HiJ(t) h + Egz + EiHt),
Hiz(t) - h - Egz - Eiz(t),(3)
5 где Hiz(t), Hi(t) - расстояние торца 11 до программной траектории соответственно при его удалении и приближении к металлической пластине 9;
Eiz(t), Eiz(t) - мгновенное значение велиQ чины смещения (ошибки позиционирования) измерительного элемента 3 соответственно при его удалении и приближении к металлической пластине 9, которое выходит за допустимые пределы и фмксиру ется регистрирующей аппаратурой.
При выходе торца 11 за допустимые пределы 2 Едг, например при приближении торца 11 к металлической пластине 9, сигнал индуктивного преобразователя 33 превысит
g порог срабатывания второго компаратора 34, в результате чего он переключится в состояние, когда с его прямого выхода будет поступать единичный сигнал прямоугольной формы, равный времени выхода торца
е 11 за допустимые пределы. Этот сигнал поступит на первый вход схемы И 35 и обеспечит прохождение на входы регистрирующей аппаратуры выходного сигнала индуктивного преобразователя 33. поступающего на второй вход схемы И 35. Выходной сигнал
индуктивного преобразователя 33, соответствующий по уровню и продолжительности отклонению измерительного элемента 3 за допустимые пределы по координате Z при его приближении к металлической пластине 9, зафиксируется соответственно самописцем 22, интегратором 23 и измерится вольтметром 24. При этом самописец 22 зафиксирует фактическую величину и форму
всех этих отклонений Eii, E2z Enz
(фиг.2,6) по координате 2, а интегратор 23 произведет интегрирование по времени всех возможных отклонений измерительного элемента 3 при его смещении за допусти- мые пределы в нижнем положении. Сигналами с выхода второго интегратора 34 включается в работу также третий электросекундомер 21, который фиксирует по координате Z время выхода измерительного элемента 3 за допустимые пределы. Это время равно сумме времени отдельных отклонений,t Л, t2ztnz (фИГ.2,6).
tz
п л П2
,S,
tlz,
(4)
где HZ - число отклонении измерительного элемента 3 по координате Z за допустимые пределы, зафиксированное самописцем 22 в нижнем положении.
При удалении торца 11 от металлической пластины 9 вдоль координаты Z и соответственно уменьшении сигнала на выходе индуктивного преобразователя 33 второй интегратор 34 установится в исходное состояние. Если этот сигнал станет ниже порога срабатывания третьего интегратора 36, то он переключится и с его инверсного выхода будет поступать единичный сигнал, равный времени выхода торца 11 за допустимые пределы. Этот сигнал поступит на первый вход схемы И 37 и обеспечит прохождение сигнала с выхода индуктивного преобразователя 33, поступающего на второй вход схемы И 37, на входы измерительной аппаратуры.
Выходной сигнал индуктивного преобразователя 33, соответствующий отклонению измерительного элемента 3 за допустимые пределы по координате Z при его удалении от металлической пластины 9, зафиксируется соответственно самописцем 26, интегратором 27 и измерится вольтметром 28. При этом самописец 26 зафиксирует фактическую величину и форму всех отклонений, например Е и, E2zЕпг(фиг.2,б) ПО
координате Z, а интегратор 27 произведет интегрирование по времени всех возможных отклонений измерительного элемента 3 при его смещении за допустимые пределы. Сигналами с выхода третьего интегратора
0
5
0
5
0
5
0
5
5
0
36 включается в работу четвертый электросекундомер 25, который фиксирует не координате время выхода измерительного элемента 3 за допустимые пределы. Это время равно сумме времени отдельных откло
нений, например tiz, 2i tiz, в течение
которых измерительный элемент 3 находится вне трубки допустимых отклонений
tt- I t,t.(5)
i - 1
где riz - число отклонений измерительного элемента 3 по координате Z за допустимые пределы, зафиксированное самописцем 26 в верхнем положении.
Выходной сигнал U индуктивного преобразователя, соответствующий по уровню и продолжительности отклонению измерительного элемента 3, находясь к нему в про- тивофазе, также имеет случайный характер и может быть определен в любой момент времени в зависимости от направления смещения измерительного элемента 3 по выражениям
U,Vt)-Ku-HiJ(t) Mh-Egz-Eii(t).
иГи(0 Ки-Н|г(т) - + Egz + Eiz(t). ( 6) где Ки - крутизна характеристики цепи катушка индуктивности индуктивный преобразователь, мм.
В выражении (6) величины h, Egz являются постоянными. Так, при нахождении измерительного элемента 3 в трубке допустимых отклонений его смещения выходное напряжение индуктивного преобразователя не фиксируется.
Для окончания операции отслеживания программной траектории LM и выхода измерительным элементом 3 в точку М оператор отпускает кнопку 5 на рукоятке 4. Это приводит к отключению фотодэтчика 12 от усилителя 29, катушки 13 индуктивности от индуктивного преобразователя 33 и к остановке первого электросекундомера 16.
По полученным данным осуществляется оценка качества задания программы перемещений промышленных роботов, которое тем выше, чем меньше выходов измерительного элемента 3 за допустимые пределы допускает оператор в процессе слежения за программной траекторией и за определенное время.
Основным параметром является точность программирования робота. Для оценки точности программирования перемещений можно воспользоваться значениями максимальных отклонений измери- тельного элемента 3 за допустимые пределы, величина которых по уровню и продолжительности, а также форма и их количество зэфиксированы самописцами 18, 22 и 26.
Если сложить по абсолютной величине максимальные значения всех отклонений Ely, Eiz, El выходов фактически отслеженной оператором траектории за допустимые пределы, измеренные по нормали к последней (фиг.2), и разделить каждую сумму на соответствующую сумму отклонений пу, riz, п, то получим осредненное значение ошибки позиционирования по координатам Y и Z
Пуп
ДЕ ч
11 - Е(,
Z&
Р
(7)
где Kz - коэффициент, учитывающий уменьшение выходного сигнала индуктивного преобразователя 33 на границе верхнего значения допустимого отклонения по отношению к нижнему, т.е.
V Uz h + Egz/о
KZ ГГ4 h -
UZT П - tgz
Суммарное значение осредненной ошибки
позиционирования равно
Ео. V(Eoy) + (Eo z)2 + (Eo z)2 (9) Оценить точность программирования перемещений можно также по величине ошибки позиционирования, равной площади отклонений, которая может быть определена путем интегрирования мгновенных значений смещений Ei(t) измерительного элемента 3 за допустимые пределы в соответствии с выражением
п
Es 2 ЛЈ Ei(t)dt.(Ю)
I 1
где tiH, tin время начала и конца выходов измерительного элемента 3 за допустимые пределы.
Площадь отклонений фиксируется интеграторами 19, 23, 27 и в виде напряжения определенного уровня измеряется вольтметрами 20, 24, 28.
Из выражений (2) и (6) можно записать:
U|y(t)
Eiy(t)
Е&(1) - (h - E9z) - , Ei(t)-(h+Egz).
(11)
Подставляя эти значения в выражение (10), получим выражения для определения суммарных ошибок позиционирования по координатам Y и Z
0
5
0
5
0
5
0
5
0
5
UT7 X (t)dt. - K i 1)
RZ
(h-Egz)- rf Ј U,z(t)dt, (12)
KUI -- 1
nz
И| 1
Ј 2 Uit(t)dt-(h+Egz).
14111 1
Суммарное значение ошибки позиционирования равно
Es« - V(Esyy + ( + (EЈf
По суммарной величине ошибок Eojr и Ess позиционирования, которые допускают операторы за одно и то же время программирования, измеренное электросекундомером 16, можно судить о возможностях различных операторов выполнять процесс задания программы перемещений.
Учитывая, что допустимые значения ошибок позиционирования по каждой координате имеют чаще всего различную величину, то для оценки качества задания программы перемещений разными операторами можно воспользоваться критерием качества, который имеет вид
I лу Еоу + л z(Eoz + EOZ).
,у+ Az(Es+z + Е|2),(14)
где Ду Л z - весовые коэффициенты, которые можно принять как величины, обратно пропорциональные допустимым отклонениям измерительного элемента 3 по координатам Y и Z;
А - 1 А - 1
Лу - р- , Лг - р- .
bgybgz
Например, для сварочных технологических роботов допустимые отклонения обычно принимают: Egy 0,5d3; Egz d3, где d3 - диаметр электродной проволоки,
По показаниям вольтметров 20, 24, 28, электросекундомеров 16, 17, 21, 25 и самописцев 18, 22, 26 путем вычисления ошибок позиционирования до и после выполнения операции программирования реальных роботов можно определить коэффициент усталости оператора, по времени выхода измерительного элемента 3 за допустимые пределы - коэффициент некачественного выполнения роботом технологической операции, а по числу выходов измерительного элемента 3 за допустимые пределы - коэффициент плавности выполнения операции программирования робота.
Определение приведенных показателей производят также при отслеживании оператором различных более сложных программных траекторий: синусоиды 39, кругов 42 разного диаметра, восьмерки 45, изменяя при этом скорость движения измерительного элемента 3 вдоль программной траектории
Если принять каки° либо значения ука занных показателей в качестве допустимых то по максимальному значению скорости движения измерительного элемента 3 ваоль программной траектории при которой значения показателей не выходят за предепы допустимых можно определить коэффициент, характеризующий возможности операторов по скорости программирования робота
Использование тренажера для подго товки операторов и оценки качества задания программы перемещении обеспечивает приближение имитируемого процесса программирования робота методом обучения к действительному регистрацию параметров и определение показателей с помощью которых осуществляется контроль квалифика ции оператора и прогноз уровня возможного качества выполнения роботом реального технологического процесса про грамма перемещений рабочего органа которого задана методом обучения по требуемой траекгопии
Формула изобретения 1. Тренажер для подготовки операторов и оценки качества задания программы перемещений промышленных технологических роботов, содержащий устройство дья задания программной траектории контрольный манипулятор с уравновешенным кинематическим механизмом на конечном звене которого установлены измерительный элемент и рукоятка ручного управления с кнопкой включения тренажера регистрирующую аппаратуру, отличающийся тем, что, с целью упрощения тренажера и повышения безопасности оператора при слежении за программной траекторией, устройство для задания программной траектории выполнено в виде установленной на основании многогранной призмы внутри которой расположен источник света, а каждая грань призмы является шаблоном из немагнитного светонепроницаемого материала, под которыми установлены матовые светопроницаемые фильтры, на каждый шаблон нанесен имитатор программной траектории движения рабочего органа в виде металлической пластины из ферромаг1НЧ НОГ ) f ПСПИг-Т I Ч 1Н ЧМНЛ 1ЛГ1)РИ ф И п MVP С Д v % г V р 1 ч « МР ,П1
прохо денич о пгт н,чч
2Тренажер nn п 1 о i n г ч 1 к) ц и г ч т м что г цечыо ппш шрш и г шости
оценки к ) задания пр р м ы прре
МРЦРНИИ VI ГЧР1 ИЭМ- ИМЯ ПК ИЧ°ГКИХ
значении от ЛОНРНИЙ . - / pi лит та до п стимне предрпп оч гт.
0 щим угтпоигтвом г ч т u п ы с регистрирующей аппарату) и ripn измерительный злсм( нт выг,с/1нгн п НИДР pvr- лого стержня торец кптопого и v not ен иэ фрррпмагнигного Г19гррия/1я F i , г,тре ниж
5 ПРИ чясти торца ycTSiionni M Ф чдгпп-к эв выточке по окружности тещ.1 к i уин а ин дуктивности причем фотодгтм,,к . г
ШНД КТИРНОСТИ Измерит. rib , ЭЛКМРмГЯ
подключены к со1 iCvHVi e y VCTT ойству 0 кнопка п. чючечия тс,еч i °п BI rxcfом ппд- КЛЮЧРНЯ к треткр /v , г -л,ч vto щ го ус- гройстра и к период ii i ;i jrpi- ундомрру регистрирующей ап . . nfl, к источнику питяния 5
3I ренажер по п 2 т м d H) ii; и и
( п ТРМ КТО СОГЛЗ0 / 1ЩР , rr,j Ci U u/U р
х-ит последовательно соединен - t пг вый
КЛЮЧ yCM/iHTe lt 1 ПРрпЦ.1 t ) ВЫ0 ходкпгорог 1o/ U i1 ч н юч з ir чтрр гегундомеГ) регигширумэи,. н гпг/тт,рр выход vci/bini1 / тг 1мр -, мзн г л-гдами первых с HMO ii ip и ичт( гкаторг. по i до вательно соединенны з гг, 1 i- rn,v
5 тивныи пррсбг i зоз второй компарчтоо и первую i sixi ; чо оРОИ ПОДКЛЮчеН К В РДЧГ ВТи; ЫА Сс МО1ИСЦа
и интегратора, выход второю ci Minpnopa также связан с входом члек росе0 кундом рз, последовательно соединенные третий компаратор и вторую схему 11 выход которой подключен к вводам третьих самописца и интегратора, ход третьего компаратора и вторые входы и вгорои схем
5 И связаны с выходом ии.гутив ,r греоб- разователя, а выход третье композитора также подключен к . о олект росекундомера. при ем ПРОЬЧИ вход )Bo- го ключа подключен к чдатч у fie( выи
0 вход второго ключа - к кнтунке индукюьно- сти, а вторые входы пррво и и глирою кл,о чей - к выход к н г t и п к л ю ч м и и h тренажера
1825728
i б
2t



| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Стенд-тренажер для оценки качества задания программы перемещений манипулятора | 1987 |
|
SU1511111A1 |
| Стенд для оценки качества манипуляторных систем | 1979 |
|
SU872252A1 |
| Устройство для контроля работы операторов | 1984 |
|
SU1290394A1 |
| УСТРОЙСТВО ТРАЕКТОРНОГО, ОПТИМАЛЬНОГО ПО БЫСТРОДЕЙСТВИЮ УПРАВЛЕНИЯ МАНИПУЛЯЦИОННЫМ РОБОТОМ | 2000 |
|
RU2199775C2 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ | 2010 |
|
RU2453891C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523187C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523186C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПРОГРАММНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ДВИЖЕНИЕМ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2013 |
|
RU2522855C1 |
| Тренажер оператора | 1985 |
|
SU1297093A1 |
Использование: в робототехнике для отработки профессиональных навыков при подготовке операторов и оценки качества задания программы перемещений роботов. Сущность изобретения: тренажер включает устройство 1 задания программной траектории, контрольный манипулятор 2, измерит тельный элемент 3, рукоятку 4 для ручного управления контрольным манипулятором, кнопку 5 для включения тренажера, регистрирующую аппаратуру, в состав которой входят электросекундомеры,самописцы. интеграторы и вольтметры Устройство 1 выполнено в виде многогранной призмы, содержащей источник света, шаблон, светонепроницаемый фильтр, металлическую пластинку и прорези. Измерительный ЭЛР- мент 3 имеет торец, е нижней части которого установлен фотодатчик, а в выточке по окружности - катушка индуктивности В состав тренажера входит согласующее устройство, которое содержит ключи, усилитель, компараторы, индуктивный преобразователь и схемы И. Устройство 1 содержит также шаблоны, на которые нанесены программные кривые, ограниченные прорезями 2 з.п. ф-лы, 8 ил. (Л С со ю ел 1 го оо Фш.з.
iii
v
fO
Фиг. А
/3
0/п5 I
flmf
JO
tfmWl
J3
z
fey
f2
Фиг 5
Фиг.б
1
Itn
f
If 19 К 21
rr
k PJ
-K25 f27
/
±7
ь
Вид А
Вид Б
Вид В
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
