Изобретение относится к робототехнике.
Целью изобретения является расширение функциональных возможностей за счет увеличения числа измеряемых параметров при оценке качества задания программы перемещений манипулятора по пространственной траектории.
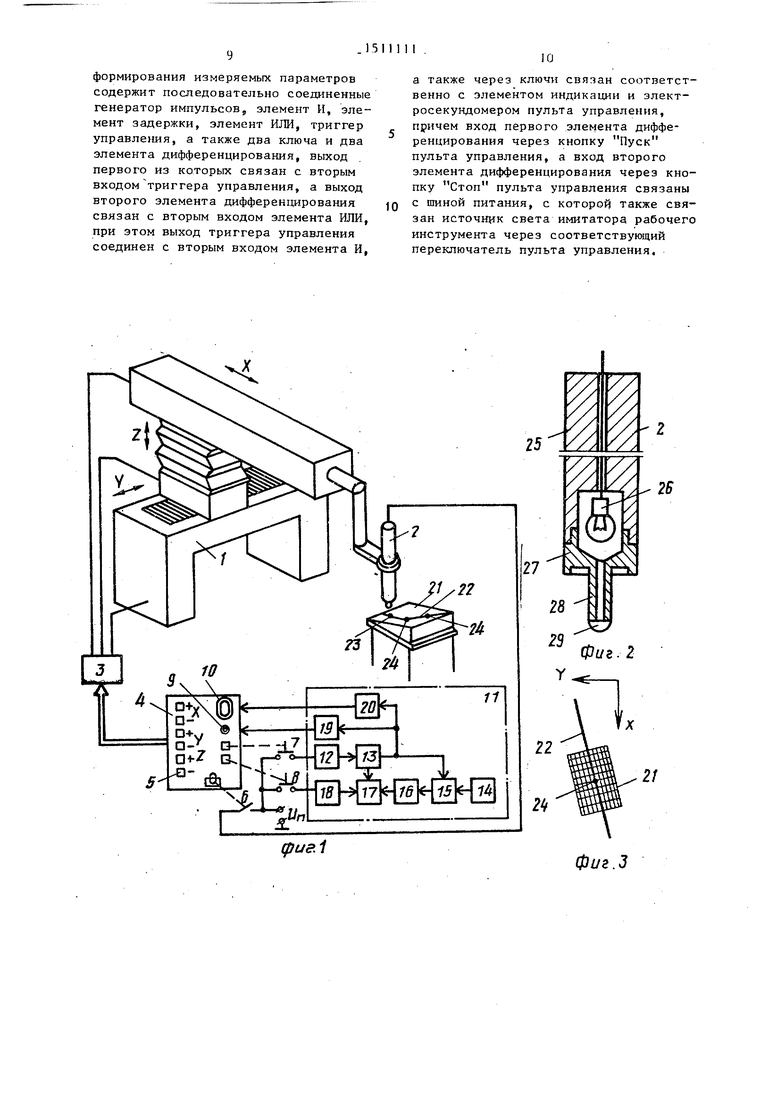
На фиг. 1 приведена блок-схема стенда-тренажера; на фиг. 2 - конструкция имитатора рабочего инструмента; на фиг. 3 - измерительная координатная сетка в окрестности заданных точек позиционирования; на фиг. 4 и 5 - схемы образования ошибок совмещения рабочего инструмента с заданной
опорной точкой траектории перемещения.
На конечном звене контрольного манипулятора 1 установлена часть устройства для регистрации -положения конечного звена манипулятора в виде имитатора 2 рабочего инструмента (например, сварочной горелки). Приводы манипулятора 1 подключены к выходам блока 3 программного управления. Вход блока 3 программного управления подключен к соответствующему выходу пульта 4 управления. На пульте 4 управления расположены кнопки 5 включения перемещения имитатора 2 по координатам X, У, Z, переключатель 6,
ел
кнопки 7 Пуск и 8 Стоп, элемент 9 индикации и электросекундомер 10. В состав стенда-тренажера входит также блок 11 формирования измеряемых параметров, который содержит первый элемент 12 дифференцирования, триггер 13 управления, генератор 14 импульсов, элемент И 15, элемент 16 задержки, элемент ИЛИ 17, второй эле мент 18 дифференцирования, ключи 19 и 20. Вход первого элемента 12 дифференцирования через кнопку 7 Пуск пульта управления и вход второго элемента 18 дифференцирования через кнопку 8 Стоп пульта А управления подсоединены к шине питания постоянного тока (Ufi). Выход первого элемента 12 дифференцирования подключен к второму входу триггера 13 управ- ления. Генератор 14 импульсов через последовательно соединенные элементы И 15, элемент 16 задержки и элемент ИЛИ 17 связан с первым входом триггера 13 управления. Второй вход элемента ИЛИ 17 подключен к выходу второго элемента 18 дифференцирования. Выход триггера 13 управления соединен с вторым входом элемента И 15 и одновременного через первый ключ 19 - с элементом индикации 9, а через второй ключ 20 - с электросекундомером 10 пульта управления. Манипулятор 1 располагается на соответствующем основании стенда-трена- жера,
В рабочей зоне манипулятора 1 установлена вторая часть устройства для регистрации положения конечного- звена манипулятора в виде располо- женной на основании измерительной координатной сетки 21 и имитатора 22 траектории перемещения с заданными исходной точкой 23 и промежуточными точками 24 позиционирования.
Имитатор 2 рабочего инструмента содержит корпус 25, в нижней части которого имеется полость дпя размещения источника 26 света, который подключен через переключатель 6 пульта управления к шине питания. В нижнюю часть имитатора 2 вставлен торец 27 с имитатором 28 сварочного электрода. Внутри имитатора 28 имеется кана для прохождения световых лучей, а на конце имитатора 28 установлена оптическая система в виде фокусирующей линзы 29. В окрестности точек позиционирования, например точки 24 имитатора 22 линии соединения, нанесена координатная измерительная сетка 21.
Работа на стенде осуществляется в два этапа: первый этап подготовительным, а на втором осуществляется оценка качества программирова1гая перемещений манипулятора, которое выполняю различные операторы,
На сетку 21 наносят имитатор 22 пространственной траектории перемещения в виде прямой, ломаной линий, синусоидальной или другой кривой с нанесенными на ней исходной точкой 23 и промежуточными точками 24 позиционирования. После этого на первом этапе оператор с помощью кнопок 5 включения пульта 4 управления последовательно подключает блок 3 программного управления к соответствующему приводу манипулятора 1, обеспечивая перемещение имитатора 2 рабочего инструмента в некоторую исходную точку 2
Затем оператор с помощью переключателя 6 пульта 4 управления подключает источник 26 света имитатора 2 к шине питания, По лучу света, выходящему из канала имитатора 28 электрода через фокусирующую линзу 29, оператор путем управления перемещением имитатора 2 по координатам X, У,добивается точного совмещения светового пятна с исходной точкой 23. Одновременно оператор устанавливает заданное положение имитатора 2 рабочего инструмента по отношению к траектории по координате Z. Положение имитатора 2 относительно исходной точки траектории по координатам X, У, Z фиксируется с помощью конДевых выключателей манипулятора 1. При этом на цифровом табло блока 3 программного управления величины перемещений должны быть равны нулю.
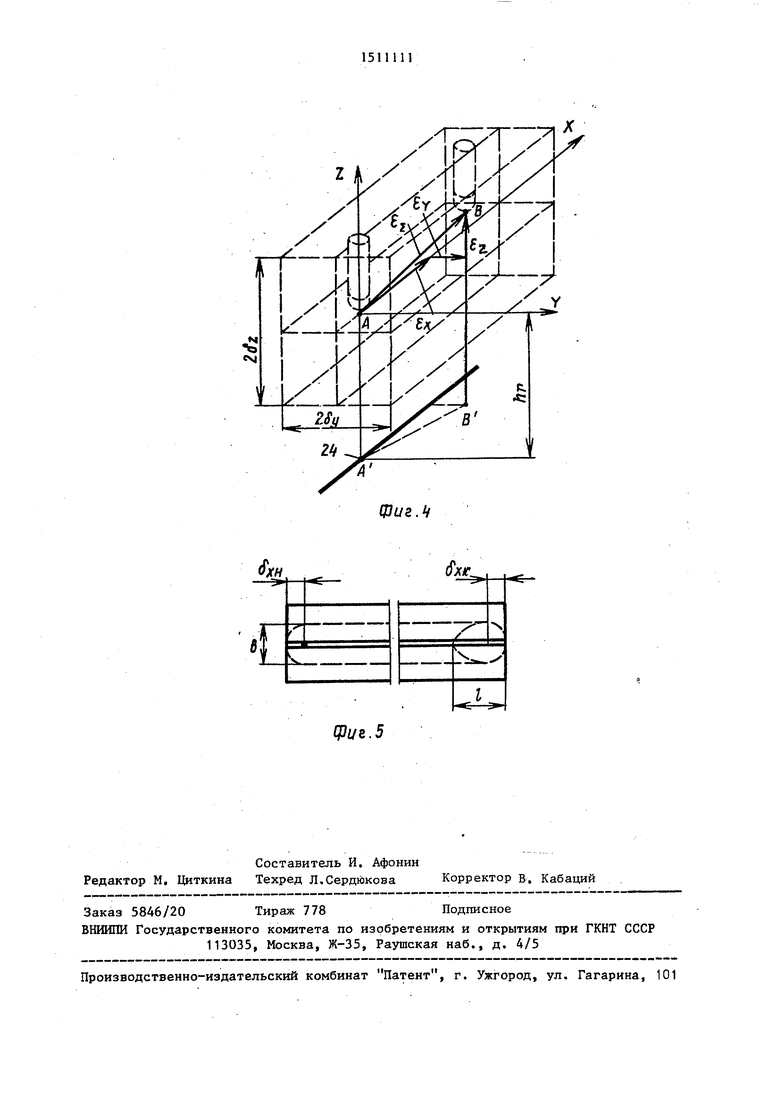
Затем оператор вьшодит имитатор 2 рабочего инструмента в заданную точку 24 имитатора 22 траектории и таким же образом по световому пятну совмещает имитатор 2 с точкой 24 позиционирования по координатам X, У, и устанавливает заданное расстояние до торца имитатора 2 по координате Z Это положение имитатора 2 соответствует его требуемому положению (точка А на фиг. 4). После этого источник 26 света отключается от шины питания.
По числу зафиксированных импульсов на цифровом табло блока 3 программного управления по каждой координате X, У, Z вычисляются величины перемещений имитатора 2 рабочего инструмента из исходной точки 23 в заданную точку 24 позиционирования имитатора 22 траектории. Точка 24 соответствует точке А , которая является проекцией точки А на плоскость ХУ (фиг, 4), Величины исходных перемещений обозначены Х, У, Z . (фиг, 4). Затем имитатор 2 рабочего инструмента выводится в исходную точку путем его движения по координатам X, У, Z до срабатывания концевых выключателей. Одновременно оператор устанавливает в нуль электросекундомер 10, а путем нажатия и отпускания кнопки 8 Стоп через второй элемент 18 дифференцирования 3 исходное состояние устанавливается триггер 13 управления.
После этого проводится второй этап оценки качества программирования перемещений манипулятора разными операторами.
Первоначально определяется величина ошибки позиционирования при установке имитатора 2 рабочего инструмента в заданную точку 24 за определенное время. Для этого путем выбора времени задержки с помощью элемента 16 задержки устанавливается продолжительность времени вывода конечного звена манипулятора 1 кз исходной точки 23 в некоторую точку 24. Затем испытуемый оператор с помощью пульта 4 управляет процессом перемещения манипулятора: кратковременно нажимает и отпускает на пульте 4 кнопку 7 Пуск, при этом скачок напряжения постоянного тока поступает на вход первого элемента 12 дифференцирования, с выхода которого положительный и fflyльc поступает на второй вход триггера 13 управления. На выходе последнего устанавл 1вает- ся разрешающий потенциал, который поступает на второй вход элемента И 15 и на входы первого и второго ключей 19 и 20. Элемент И 15 открывается и пропускает на вход элемента 16 задержки импульсы с генератора 14. Частота импульсов генератора 14 выбирается равной порядка Гц. Ключи 19 и 20 также открываются, в результате чего элемент 9 индика- ,ции и электросекундомер 10 подключаются к шине питания. Элемент 9 индикации загорается и сигнализирует оператору о включении режима программирования перемещения, а электросекундомер 10 отсчитывает заданное время программирования. Одновременно с включением режима программирования оператор с помощью кнопок 5 пульта 4 начинает управлять процессом перемещения имитатора 2 рабочего инструмента из исходной точки 23 в заданную точку 24 по координатам X, У, Z. При этом он стремится как можно точнее совместить имитатор 28 электрода с заданной точкой 24, визуально наблюдая за положением имитатора 28 электрода. Через некоторое заданное время на выходе элемента 16 задержки появляется импульс, который
через элемент ИДИ 17 поступает на первый вход триггера 13 управления. Последний устанавливается в исходное состояние, в результате чего элемент И 15 и ключи 19 и 20 закрываются. Элемент 9 индикации гаснет, а электросекундомер 10 останавливается. Погашенная лампочка является для оператора сигналом об окончании процесса программирования, а электросекундомер 10 фиксирует заданную величину времени программирования.
Ошибка позиционирования вычисляется следУгацим образом.
Пусть за заданное время црограммирования перемещения рабочего органа оператор установил его относительно некоторой точки 24 в точке В (фиг.4). Проекьщя этой точки на плоскость ХУ есть точка в . По числу зафиксированных импульсов на цифровом табло блока 3 программного управления по каждой координате X, У, Z вычисляются величины перемещений имитатора 2 из исходной точки 23 в окрестность некоторой точки 24 (точка В). Обозначим эти перемещения Х., У, Zg, Тогда величины ошибок по каждой из координат определяются по вьфажениям
х ,д I
v 1У,,-У
в д
,.
Суммарная ошибка позиционирования имитатора 2 рабочего инструмента в заданной точке траектории будет 5 равна .
E f yTEyr .
По суммарной величине ошибки позиционирования, которую допускают
различные операторы за одно и то же время программирования, можно судить о возможностях операторов вьшолнять процесс программирования.
Учитывая то, что допустимые значения ошибок позиционирования по каждой координате имеют различную величину, для оценки качества программирования различными операторами можно воспользоваться критерием ка- чества, который имеет следующий вид:
,, ,
j - составляющие ошибок позиционирования по координатам X, У, Z;
Л. - весовые коэффициенты, которые можно принять как величины, обратно пропорциональные допустимым отклонениям имитатора 2 по координатам X, У, Z;
Допустимые отклонения обычно принимают :-,
2,72
0,5 ,; f,
где d э - диаметр электрода; b - ширина шва;
1 - длина кратера в конце сварного шва (фиг. 5).
При необходимости время программирования перемещения между точками может выбираться путем изменения времени задержки элемента 16.
Сократить время определения составляющих ошибок совмещения имитатора 2 рабочего инструмента с заданной точкой 24 имитатора 22 траектории в плоскости ХУ на этапе предварительного обучения операторов можно, если после вывода имитатора 2 в окрестность опорной точки 24 оператор с помощью переключателя 6 пульта 4 управления подключит к шине питания источник 26 света имитатора 2 рабочего инструмента. Тогда луч Света, выходящий из имитатора 28 электрода и сфокусированный линзой 28, будет по- казывать на координатной измерительной сетке 21 величины смещения имитатора 2 в направлении координат X и У по отношению к заданной точке
Q
5
0
5
0
5
0
5
0
24 (фиг. 3). Величины ошибок в.этом случае оператор определяет визуально.
Стенд-тренажер позволяет также проводить оценку качества программирования перемещения рабочего инструмента за время, которое выбирает сам оператор. Для этого он отключает выход элемента 16 задержки от входа элемента ИЛИ 17 (на фиг. 1 цепь отключения условно не показана). Затем оператор нажимает и отпускает кнопку 7 Пуск пульта 4, и, как в предыду- щем случае, осуществляет управление перемещением имитатора 2 в некоторую точку 24. После того как оператор, с его точки зрения, достаточно точно совместил имитатор 2 с.заданной точкой, он нажимает кнопку 8 Стоп. По показаниям электросекундомера 10 определяется время программирования, а по световому пятну на координатной сетке 21 можно определить величины ошибок совмещения по координатам X и У.
Формула изобретения
1,Стенд-тренажер для оценки качества задания программы перемещений манипулятора, содержащий основание для установки контрольного манипулятора, связанного соответствующим образом с блоком программного управления и пультом управления, а также устройство для регистрации положения конечного звена манипулятора, выполненное из двух частей, имеющих возможность бесконтактного взаимодействия друг с другом, причем одна часть установлена на конечном звене манипулятора, а другая - на основании, отличающийся тем, что,
с целью распшрения функциональныхе возможностей, он снабжен блоком формирования измеряемых параметров, связанным с пультом управления, при этом часть устройства для регистрации пот ложения, установленная на конечном звене манипулятора, вьшолнена в виде имитатора рабочего инструмента, содержащего источник света и оптическую систему, а другая часть, установленная на основании, выполнена в виде измерительной координатной сетки с нанесенной на нее траекторией перемещения.
2.Стенд-тренажер по п. 1, о т - л. и ч а ю щ и и с я тем, что блок
формирования измеряемых параметров содержит последовательно соединенные генератор импульсов, элемент И, элемент задержки, элемент ИЛИ, триггер управления, а также два ключа и два элемента дифференцирования, выход первого из которых связан с вторым входом триггера управления, а выход второго элемента дифференцирования связан с вторым входом элемента ИЛИ, при этом выход триггера управления соединен с вторым входом элемента И,
.151111 I
10
а также через ключи соответственно с элементом индикации и злект- росекундомером пульта управления, причем вход первого элемента дифференцирования через кнопку Пуск пульта управления, а вход второго элемента дифференцирования через кнопку Стоп пульта управления связаны с шиной питания, с которой также связан источник света имитатора рабочего инструмента через соответствующий переключатель пульта управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд-тренажер для оценки качества задания программ управления промышленным роботом для сварки | 1985 |
|
SU1291387A1 |
| Тренажер для подготовки операторов и оценки качества задания программы перемещений промышленных технологических роботов | 1991 |
|
SU1825728A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1425078A1 |
| Стенд для оценки качества манипуляторных систем | 1979 |
|
SU872252A1 |
| Стенд для оценки качества манипуляторных систем | 1976 |
|
SU580113A1 |
| Стенд-тренажер для оценки качества манипуляторных систем | 1977 |
|
SU643321A1 |
| Устройство для программирования сварочных роботов обучением | 1987 |
|
SU1558599A1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ РОБОТИЗИРОВАННОЙ ХИРУРГИИ | 2016 |
|
RU2719919C2 |
Изобретение относится к робототехнике. Цель изобретения - расширение функциональных возможностей за счет увеличения числа измеряемых параметров при оценке качества задания программы перемещений манипулятора по пространственным траекториям. Для этого одна часть устройства для регистрации положения конечного звена контрольного манипулятора, установленная на основании стенда, выполнена в виде измерительной координатной сетки с нанесенной на нее траекторией перемещения, а другая часть, установленная на конечном звене манипулятора, - в виде имитатора рабочего инструмента с источником света и оптической системой. Стенд дополнительно снабжен блоком формирования измеряемых параметров. Перемещение манипулятора осуществляется оператором с помощью соответствующих кнопок пульта управления и блока программного управления. Оценка качества программирования производится по измеренным отклонениям имитатора рабочего инструмента от заданных точек траектории, а также по показаниям электросекундомера пульта управления. 1 з.п. ф-лы, 5 ил.
(ригЛ
фиг.З
ZA
cpu&.5
Фиг.
| Авторское свидетельство СССР | |||
| Стенд-тренажер для испытания манипуляторов | 1985 |
|
SU1240576A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
