Известны способы настройки Jмнoгoдвигaтельного электропривода петлевого проволочного стана многократного волочения с питанием электродвигателей от регулируемых в зависимости от положения петлерегулятора индивидуальных источников питания, включенных в замкнутую систему автоматического регулирования с общим эталонным напряжением и обратными связями по скорости двигателей, осуществленными при помощи тахогенераторов.
По предлагаемому способу при максимальном ослаблении поля всех двигателей проволоку закрепляют на первом барабане, повышают эталонное напряжение от нуля до номинального значения и набирают некоторое число витков проволоки на барабан. Затем барабан останавливают и указаиные операции повторяют на каждом барабане. Ослабление поля тахогенераторов производят в соответствии с заданной программой волочения. При вращающихся последовательных барабанах д,ополнительно регулируют ослабление поля тахогенераторов до тех пор, пока петлерегулятор не займет среднего положения.
Способ позволяет повысить точность регулирования и надежность работы стана.
го стана для осуществления предлагаемого способа.
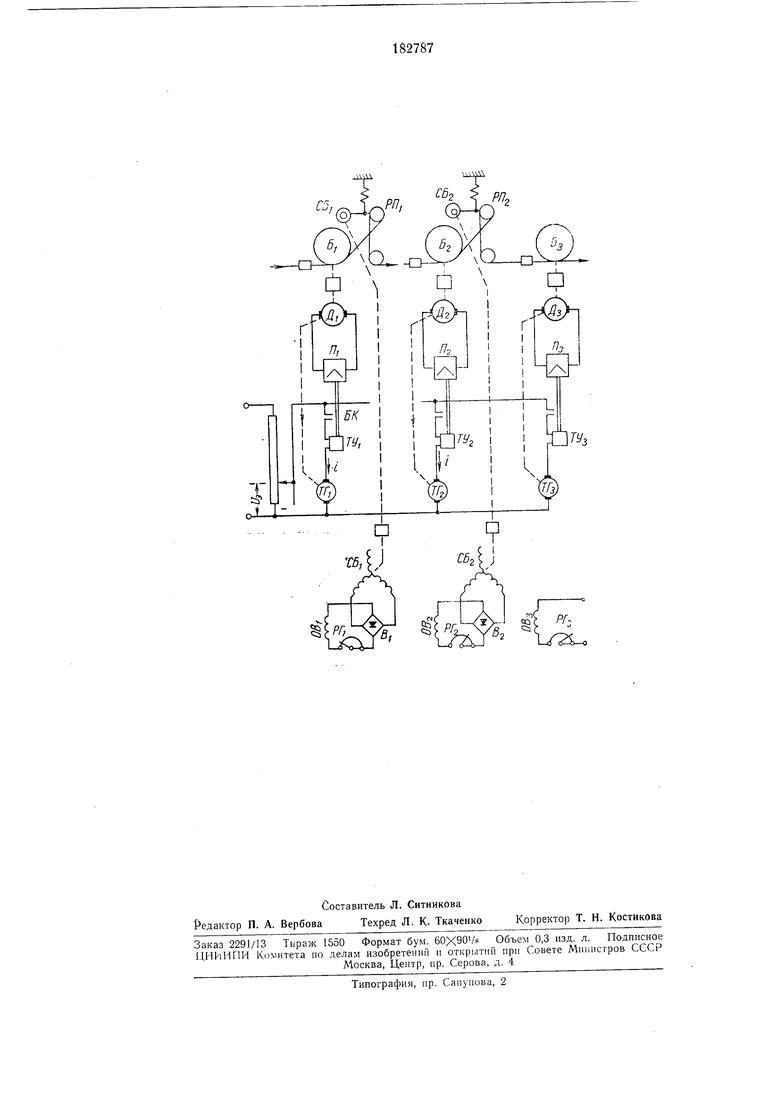
Электродвигатели Дь До, Дз барабанов питаются индивидуально от статических нреобразователей. Скорость двигателей регулируют изменением напряжений преобразователей rii, П-2, Яз. На втором валу каждого электродвигателя устанавливают тахогенератор - ТГ, ГГа, ГГз.
Схема управления замкнутая: выходная величина скорости каждого блока, определяемая соответственно напряжением тахогенераторов (главная обратная связь), подается непосредственно на вход транзисторных усилителей ТУ, ТУ-2, ТУз и сравнивается с одним источником эталонного напряжения U..
Для получения соответствующей скорости барабана, обусловленной маршрутом волочения, величина обратной связи тахогенераторов
регулируется с помощью регуляторов Pfi, РГ-2, РГ. Изменение тока возбуждения тахогенератора влечет за собой изменение его передаточной характеристики К, связывающей э.д.с. тахогенератора со скоростью ,„ /(1.
Коэффициент К может быть изменен в два и более раза. В соответствии с этим будут устанавливаться соответствующие скорости блоков, то есть в статическом режиме для любого блока снраведливо равенство
„ U,-l,,.R я-- ,
где Uy - задающее напряжение; iy - ток управления усилителя; JR - суммарное сопротивление цепи; К - передаточный коэффициент тахогенератора.
В связи с нелинейностью системы и износом волок необходимо применять статические цетлевые регуляторы РП и РП-, оси которых связаны непосредственно с бесконтактными сельсинами СБ, и СБ-2. Последние через выпрямители BI и В-2 воздействуют на обмотки возбуждения тахогенераторов ОВ, ОВ и ОБз. Величина коэффициента усиления регулятора должна выбираться из возможности исправления ошибок, вызванных нелинейностью системы.
Практически при полном диапазоне перемещения регуляторов Pfli и РЯз (60°) изменение скорости не нревыщать 30Vo от максимальной, то есть роторы сельсинов CBi и СБ- будут поворачиваться на незначительный угол - всего 15°. Регуляторы предназначены только для подрегулирования скорости.
Статический регулятор состоит из сельсина, связанного с регулятором, и воздействует на асинхронный двигатель с редуктором, на выходном валу которого установлен сельсин. Последний влияет на обмотку возбуждения тахогенератора, что дает статизм петли: при изменении скорости от О до номипальной и наоборот регулятор будет всегда находиться в среднем положении.
Пусть задан худший маршрут волочения, в котором двигатель нервого барабана вращаться со скоростью, например 1000 об/мин, а у последующих двигателей скорость вращения возрастает и доходит на последнем до максимальной - 2000 об/мин. Одним общим регулятором возбуждений одновременно ослабляется ноле у всех двигателей до максимальной скорости. Перед настройкой каждый тахогеператор имеет но1минальное возбуждение. Заостренный конец проволоки пропускается через первую волоку и закрепляется на барабане Б. Нажатием ножной педали плавно повышается эталонное напряжение от нуля до и,, барабан Б вращается на заправочной скорости; блок-контакт БК замкнут. Поскольку двигатель Д после разгона должен имет скорость 1000 об/мин, регулятор РГ устанавливает тахогенератору ГА также номинальное возбуждение. После набора 20-25 витков отпускают ножную педаль - панряжепие tJ снижается до 0. После остаповки снимают вптков, конец проволоки острят, затем проволоку пропускают через петлерегулятор Pfli и ролик. Далее заостренный конец пропускают через волоку второго блока и закрепляют на нем. Первый блок отключают (блок-контакт БК. разомкнут), второй включают. Предварительно специальным регулятором
(на чертеже не показан, так как блоки управления двигателей аналогичны) ослабляют ноле тахогенератора Tfz, нажатием педали подни.мают эталонное напряжение до прежней величины и выбирают петлю между
барабанами, после чего включают оба блока. Вращая регулятор второго тахогенератора Pfi в ту или другую сторону, добиваются, чтобы петлевой регулятор РП занял среднее положение, а затем на втором барабане также набирают 20-25 витков. После этого останавливают оба блока и аналогично настраивают остальные блоки. Так находят уставку главных обратных связей остальных блоков. После настройки стан запускают па рабочую скорость, для чего достаточно плавно поднять задаюн1,ее напряжение от нуля до номинального.
Предмет изобретения
Способ настройки многодвигательного электропривода петлевого проволочного стана многократного волочения с питанием электродвигателей от регулируемых в зависимости от положения петлерегулятора индивидуальных
источников, включенных в замкнутую систе.му автоматического регулирования с общим эталонным напряжением и обратными связями по скорости двигателей, осуществленными при помон и тахогенераторов, отличающийся тем,
что, с целью повышения точности регулирования и надежности работы стана, при максимальном ослаблении поля всех двигателей проволоку закрепляют на первом барабане, повышают эталонное напряжение от нуля до
номинального значения и набирают некоторое количество витков проволоки на барабан, после чего барабан останавливают и указанные операции повторяют на каждом следующем барабане, причем ослабление поля тахогенераторов приводят в соответствие с заданной программой волочения, а при вращающихся последовательных барабанах дополнительно регулируют ослабление поля тахогенераторов до тех пор, нока петлерегулятор не займет
среднего положения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД МНОГОКРАТНОГО ПРЯМОТОЧНОГО ВОЛОЧИЛЬНОГО СТАНА | 1997 |
|
RU2158469C2 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОКРАТНЫМ ПРЯМОТОЧНЫМ ВОЛОЧИЛЬНЫМ СТАНОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2111807C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ДВУХКАТУШЕЧНОГО НАМОТОЧНОГО АППАРАТА | 1973 |
|
SU383184A1 |
| Многодвигательный электропривод | 1984 |
|
SU1166649A1 |
| Устройство для регулирования электропривода прямоточного стана многократного волочения | 1977 |
|
SU662184A1 |
| Стан многократного волочения проволоки | 1977 |
|
SU880539A1 |
| Способ настройки прямоточного стана и устройство для его осуществления | 1975 |
|
SU620293A1 |
| Система управления электроприводом прямоточного стана многократного волочения | 1978 |
|
SU749480A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СКОРОСТИ СДВОЕННОГО НАМОТОЧНОГО АППАРАТА | 1973 |
|
SU383670A1 |
| Прямоточный двухкратный волочильный стан | 1959 |
|
SU131322A1 |