Изобретение относится к метизному производству и может быть использовано для автоматической подачи непрерывного материала в виде прутка или полосы в рабочую зону пресса рубки или штамповки.
Цель изобретения повышение точности шага подачи материала и повышение долговечности захватных органов.
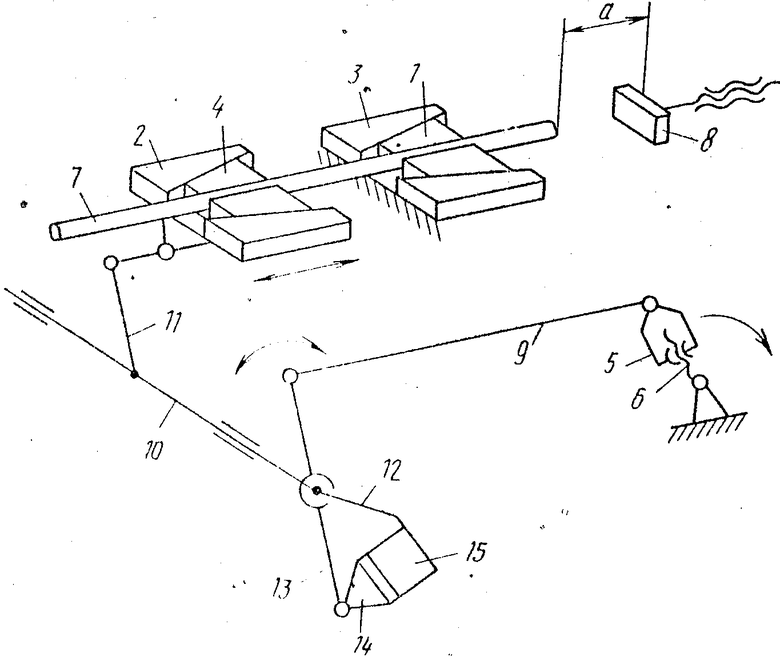
На чертеже приведена кинематическая схема устройства.
Устройство содержит неподвижную 1 и подвижную 2 каретки с цанговыми захватными органами 3 и 4, жестко установленный на главном валу пресса (на рисунке не показан) кривошип 5 с винтовым регулятором 6 величины подачи материала 7 до упора 8, шатун 9 и вспомогательный вал 10 с двумя рычагами. Рычаг 11 кинематически связан с подвижной кареткой 2, другой приводной рычаг 12 связан c магнитной системой, состоящей из ярма 14 и блока 15 магнитов с магнитопроводами, шарнирно установленного на вспомогательном валу 10 двуплечим рычагом 13, другой конец которого связан с шатуном 9.
Величина подачи материала 7 определяется длиной кривошипа 5 и устанавливается винтовым регулятором 6 и положением упора 8. При этом расстояние (а) от плоскости реза до упора 8 меньше или равно ходу подвижной каретки 2.
Вращение кривошипа 5 через шатун 9, части рычагов 13 и 12, вспомогательный вал 10 и рычаг 11 вызывает перемещение подвижной каретки 2. С момента перехода кривошипа 5 через левую мертвую точку цанговый захватный орган 4 удерживает материал 7. При этом захватный орган 3 открыт. Подвижная каретка 2 перемещает материал 7 до упора 8 и останавливается вместе с рычагом 11, вспомогательным валом 10 и рычагом 12. Если к этому моменту кривошип 5 не достиг правой мертвой точки, при дальнейшем его движении шатун 9 и связанный с ним рычаг 13 продолжает движение, возрастает усилие в магнитной системе до предельного значения, при этом ярмо 14 отрывается от блокa 15 магнитов и магнитопроводов. После перехода кривошипа 5 через левую мертвую точку захватный орган 4 раскрывается, а орган 3 удерживает материал 7, шатун 9 и рычаг 13 возвращается, ярмо 14 притягивается к блоку 15 магнитов и магнитопроводов, подвижная каретка возвращается в исходное положение.
Таким образом, предлагаемое устройство обеспечивает точное выполнение шага подачи (а) без перегрузок рычагов 11, 12, 13, шатуна 9 и кривошипа 5 и без проскальзывания материала 7 и под нагрузкой относительно захватных органов, т.е. выполняется поставленная задача повышения точности шага подачи и долговечности захватных органов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для формирования слоя изделий | 1991 |
|
SU1828429A3 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ НЕПРЕРЫВНОГО МАТЕРИАЛА В РАБОЧУЮ ЗОНУ ПРЕССА | 1991 |
|
RU2013172C1 |
| ШАРНИР УНИВЕРСАЛЬНОГО ШПИНДЕЛЯ | 1988 |
|
SU1494322A1 |
| Линия формирования садки сырца-кирпича на печную вагонетку | 1987 |
|
SU1412975A1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 1992 |
|
RU2023919C1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО КАМЕРЫ СУХОГО ТУШЕНИЯ КОКСА | 1991 |
|
RU2048503C1 |
| Захватное устройство | 1987 |
|
SU1495122A1 |
| ШАРНИР УНИВЕРСАЛЬНОГО ШПИНДЕЛЯ | 1989 |
|
SU1633581A1 |
| Рабочий ротор роторной машины | 1988 |
|
SU1507589A1 |
| Роторно-конвейерная линия для изготовления деталей с резьбой | 1989 |
|
SU1696311A1 |
Сущность изобретения: устройство содержит неподвижную и подвижную каретки с захватными органами, кривошип, жестко смонтированный на главном валу пресса, шатун, один конец которого сопряжен с кривошипом, горизонтально расположенный вспомогательный вал, два одноплечих рычага, смонтированные на вспомогательном валу, один из которых кинематически связан с подвижной кареткой, а другой, приводной с кривошипом, шарнирно установлен на вспомогательном валу, и систему постоянных магнитов, выполненную в виде ярма, шарнирно закрепленного на одном из концов двуплечего рычага, блока магнитов с магнитопроводами, закрепленными на свободном конце приводного рычага, при этом другой конец двуплечего рычага шарнирно связан со свободным концом шатуна. 1 ил.
УСТРОЙСТВО ДЛЯ ПОДАЧИ НЕПРЕРЫВНОГО МАТЕРИАЛА В РАБОЧУЮ ЗОНУ ПРЕССА, содержащее неподвижную и подвижную каретки с захватными органами, кривошип, жестко смонтированный на главном валу пресса, шатун, один конец которого сопряжен с кривошипом, горизонтально расположенный вспомогательный вал, два одноплечих рычага, смонтированные на вспомогательном валу, один из которых кинематически связан с подвижной кареткой, а другой приводной с кривошипом, отличающееся тем, что оно снабжено двуплечим рычагом, шарнирно установленным на вспомогательном валу и системой постоянных магнитов, выполненный в виде ярма, шарнирно закрепленного на одном из концов двуплечего рычага, блока магнитов с магнитопроводами, закрепленными на свободном конце приводного рычага, при этом другой конец двуплечего рычага шарнирно связан со свободным концом шатуна.
| Норицын И.А | |||
| и Власов В.И | |||
| Автоматизация и механизация технологических процессов ковки и штамповки | |||
| М.: Машиностроение, 1967, с.196, рис.105. |
