3
лиидра 3 губки зажимных рыча1Ч1В 2 сводятся. По.чзун 6 с элементом 10 датчика перемещается за сче 1 та тяг 7. При зажиме детали ползун 6
1495122
i; элемент 10 останавливаются, при этом показания с неподвижного элемента 9 датчика передаются на измерительный блок. 1 з.п. ф-лы, 2 ил.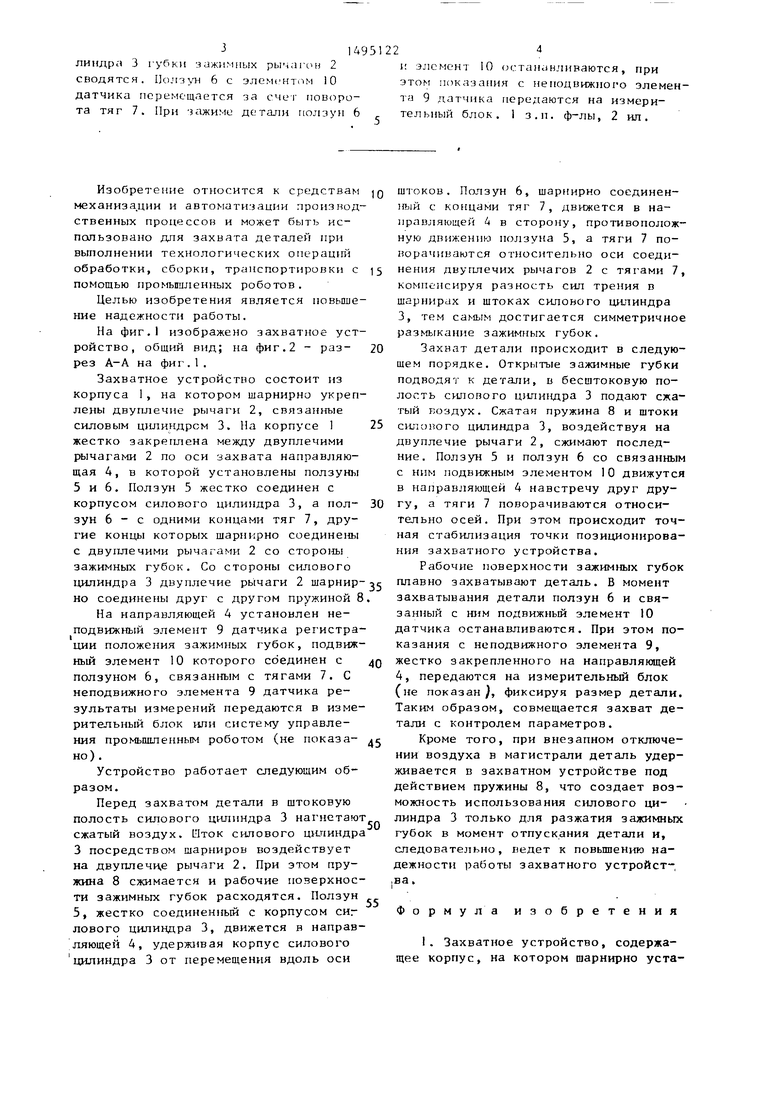
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1985 |
|
SU1291393A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| ЗАХВАТ | 2000 |
|
RU2175910C1 |
| Захват | 1983 |
|
SU1117206A1 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Схват | 1985 |
|
SU1289679A1 |
| Устройство для подачи заготовок в рабочую зону | 1976 |
|
SU571330A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ЗАГОТОВОК В ПРЕСС | 1993 |
|
RU2063287C1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
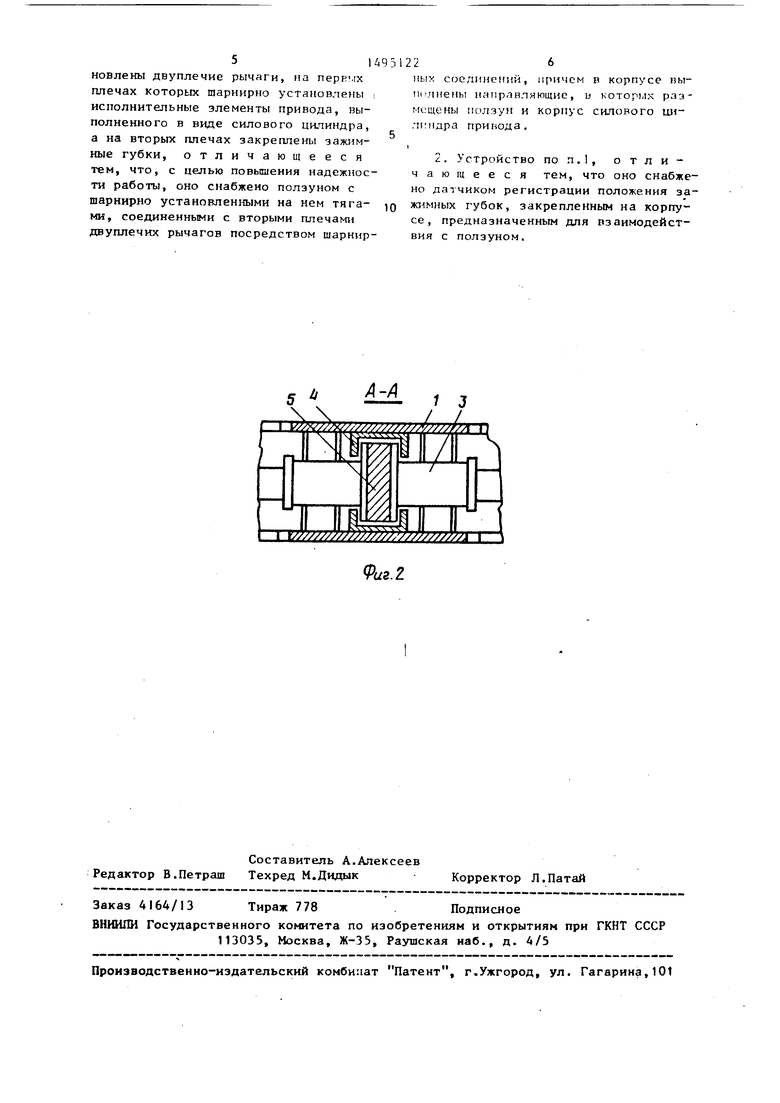
Изобретение относится к средствам механизации и автоматизации вспомогательных технологических операций, выполняемых с помощью промышленных роботов. Целью изобретения является повышение надежности в работе. Устройство с раскрытыми зажимными губками подводят к детали. В бесштоковую полость силового цилиндра 3 подают рабочую среду. Под воздейсвием пружины 8 и усилия на штоках силового цилиндра 3 губки зажимных рычагов 2 сводятся. Ползун 6 с элементом 10 датчика перемещается за счет поворота тяг 7. При зажиме детали ползун 6 и элемент 10 останавливаются, при этом показания с неподвижного элемента 9 датчика передаются на измерительный блок. 1 з.п.ф-лы, 2 ил.
Изобретение относится к средствам механиза.ции и автоматизации произнод- ственных процессов и может быть использовано для захвата деталей при выполнении технологических операщш обработки, сборки, транспортировки с помощью промьпцленных роботов.
Целью изобретения является повьше- ние надежности работы.
На фиг.1 изображено захватное устройство, общий вид; на фиг.2 - раз- рез А-А на фиг. 1 .
Захватное устройство состоит из корпуса 1, на котором шарнирно укреплены двуплечие рычаги 2, связанные силовым цилиндром 3. На корпусе 1 жестко закреплена между двуплечими рычагами 2 по оси захвата направляющая 4, в которой установлены ползуны 5 и 6. Ползун 5 жестко соединен с корпусом силового цилиндра 3, а пол- зун 6 - с одними концами тяг 7, другие концы которых щарнирно соединены с двуплечими рычагами 2 со CTopoifti зажимных губок. Со стороны силового цилиндра 3 двуплечие рычаги 2 шарнирно соединены друг с другом пружиной 8
На направляющей 4 установлен неподвижный элемент 9 датчика регистрации положения зажимных губок, подвижный элемент 10 которого соединен с ползуном 6, связанным с тягами 7. С неподвижного элемента 9 датчика результаты измерений передаются в измерительный блок или систему управления промьщшенным роботом (не показа- но) .
Устройство работает следующим образом.
Перед захватом детали в штоковую полость силового цилиндра 3 нагнетают сжатый воздух. Шток сштового цн.пиндра 3 посредством шарниров воздействует на двуплечне рычаги 2. При этом пружина 8 сжимается и рабочие поверхности зажимных губок расходятся. Ползун 5, жестко соединенный с корпусом сиг левого цилиндра 3, движется в направ- ляющей 4, удерживая корпус силового цилиндра 3 от перемещения вдоль оси
Q 5
0
5 0 j
0
0
штоков. Ползун 6, шарнирно соединенный с концами тяг 7, движется в на- 11ра зляю1цей 4 в сторону, противоположную движению ползуна 5, а тяги 7 поворачиваются относительно оси соединения двуплечих рычагов 2 с тягами 7, компенсируя разность сил тре}1ия в щарнирах и щтоках силового цилиндра
3,те.м самым достигается симметричное размыкание зажимных губок.
Захват детали происходит в следующем порядке. Открытые зажимные губки подводят к детали, в бесштоковую полость силового цили1щра 3 подают сжатый воздух. Сжатая пружина 8 и штоки силового цилиндра 3, воздействуя на двуплечие рычаги 2, сжимают последние. Ползун 5 и ползун 6 со связанным с ним подвижным элементом 10 движутся в направляющей 4 навстречу друг другу, а тяги 7 поворачиваются относительно осей. При этом происходит точная стабилизация точки позиционирования захватного устройства.
Рабочие поверхности губок плавно захватывают деталь. В момент захватывания детали ползун 6 и связанный с ним подвижный элемент 10 датчика останавливаются. При этом показания с неподвижного элемента 9, жестко закрепленного на направляющей
4,передаются на измерительный блок (не показан J, фиксируя размер детали. Таким образом, совмещается захват детали с контролем параметров.
Кроме того, при внезапном отключении воздуха в магистрали деталь удерживается в захватном устройстве под действием пружины 8, что создает возможность использования силового цилиндра 3 только для разжатия зажимных губок в момент отпускания детали и, следовательно, ведет к повышению надежности работы захватного устройст-, ,ва
Формула изобретения
I. Захватное устройство, содержащее корпус, на котором шарнирно уста5IA95
новлены двуплечие рычаги, на первмх плечах которьгх шарнирно установлены исполнительные элементы привода, выполненного в виде силового цилиндра, а на вторых плечах закреплены зажимные губки, отличающееся тем, что, с целью повышения надежности работы, оно снабжено ползуном с шарнирно установленными на нем тяга- д ми, соединенными с вторыми плечами двуплечих рычагов посредством шарнир1226
ных сослинсннй, причем в корпусе ны- ш лнены направляющие, и которых размещены ползун и корпус силового Ш1- линдра принода.
А-А
1 3
| Захват манипулятора | 1980 |
|
SU929295A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
