Изобретение относится к землеройным машин, а именно к гидроприводам одноковшовых экскаваторов, погрузчиков.
Целью изобретения является повышение надежности за счет уменьшения количества переключений дополнительного распределителя.
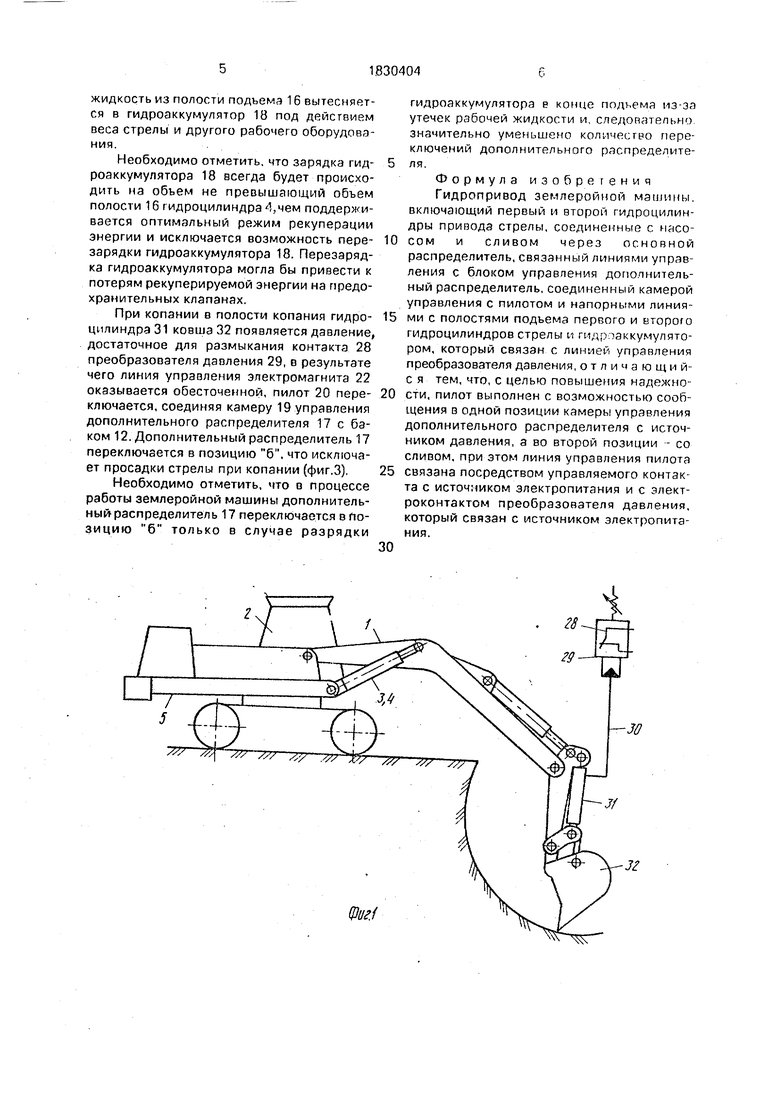
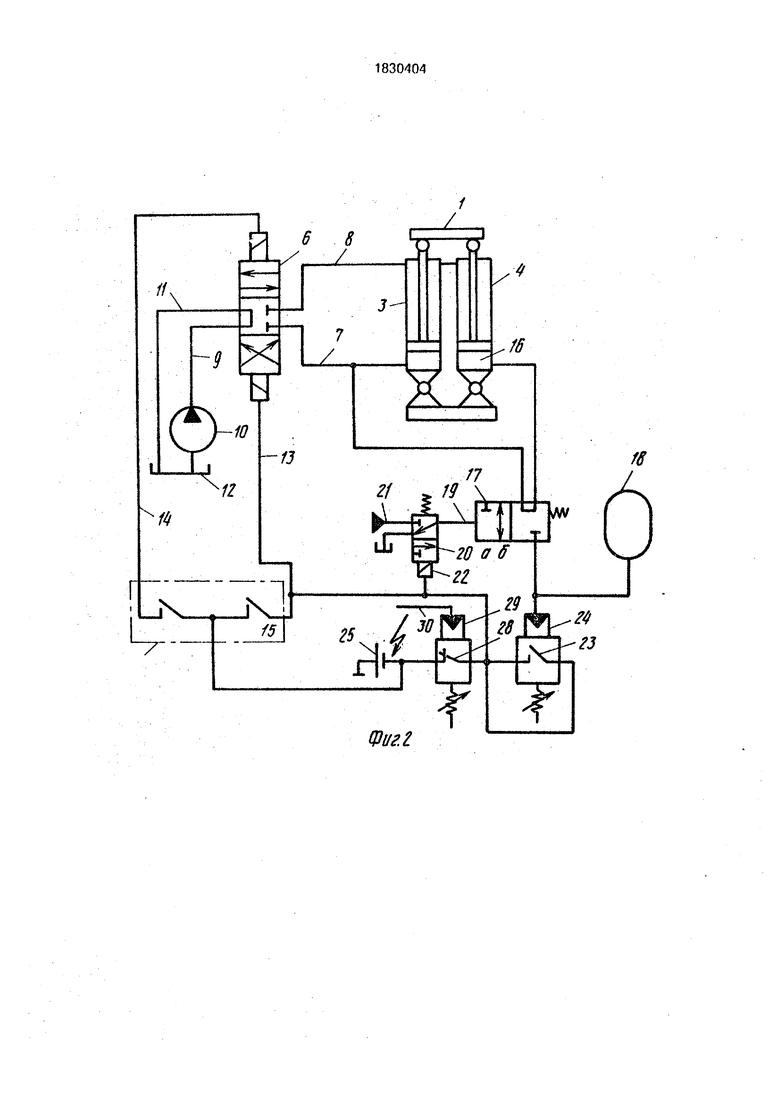
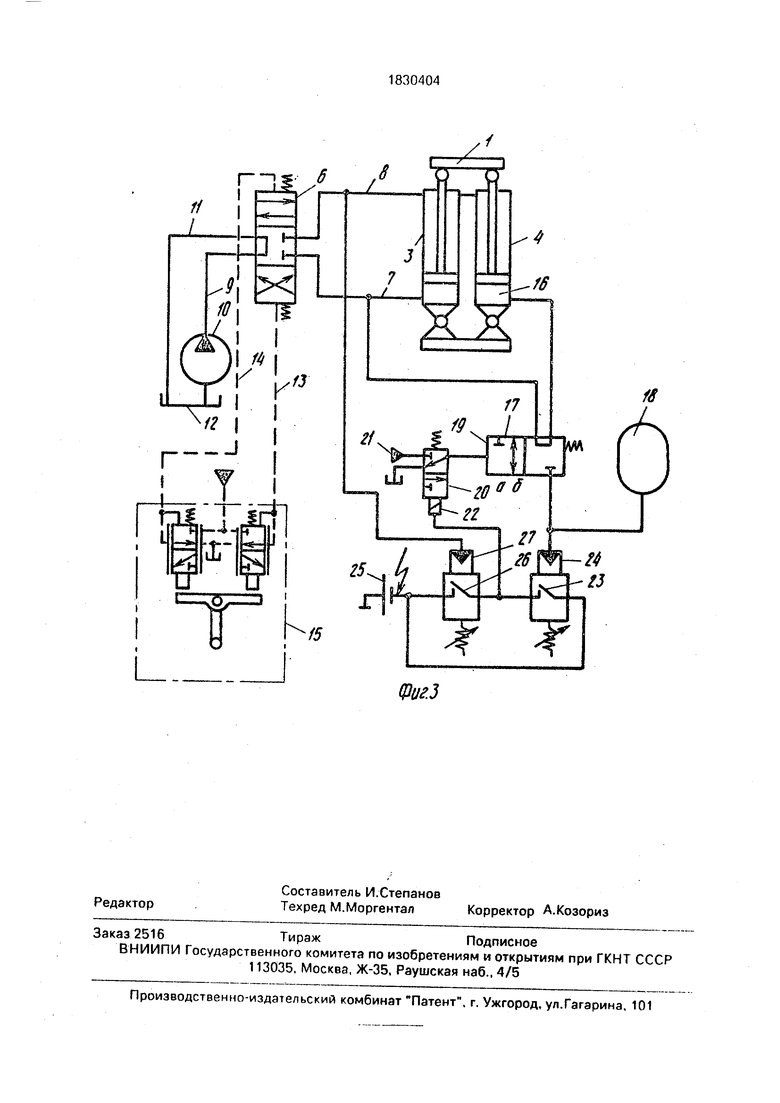
На фиг.1 дан общий вид землеройной машины; на фиг.2 и 3 - примеры исполнения гидравлической схемы гидропривода.
Гидропривод (фиг.2) содержит стрелу 1 экскаватора 2, шарнирно соединенную с гидроцилиндрзми 3 и 4 и платформой 5, Основной распределитель 6 соединен линиями 7 и 8 с гидроцилиндрами 3 и 4, а также линией 9 с насосом 10 и сливной линией 11 с баком 12. Управление распределителем 6 производится посредством линий управления 13 и 14 от блока 15 управления.
Полость подъема 16 гидроцилиндра 4 через дополнительный распределитель 17 в
его позиции а связана с гидроаккумулятором 18 или линией 7 в его позиции б. Управление дополнительным распределителем 17 обеспечивается посредством камеры 19 управления. Последняя соединена через пилот 20 с источником давления управления 21 или сливной линией с баком 12. Управление пилотом 20 осуществляется посредством электромагнита 22, линия управления которого связана через нормально разомкнутый контакт 23 преобразователя давления 24 с источником электропитания 25. Линия управления пилота 20 также связана с источником электропитания 25 через нормально разомкнутый управляемый контакт 26 преобразователя давления 27. Линии управления преобразователей 24 и 27 соответственно связаны с гидроаккумулятором 18 и линией управления 13 ОСНОЕЗ- ного распределителя 6 на опускание стрелы 1,
ы
Гидропривод фиг.З отличается от гидропривода.фиг.2 тем, что распределитель 6 выполнен электроуправляемым, и линия управления электромагнита 22 пилота 20 связана с источником электропитания 25 через электроконтакт 23 преобразователя давления 24 и нормально разомкнутый управляемый контакт на опускание стрелы (линия управления 13) блока 15 управления. Кроме того, в гидроприводе (фиг.З) предусмотрена возможность для исключения просадок стрелы при копании. Электроконтакт 23 преобразователя давления 24 связан с источником электропитания 25 через нормально замкнутый контакт 28 преобразователя давления 29. линия управления которого связана с полостью копания гидррцилиндра 31 ковша 32.
Предохранение гидропривода от перегрузки обеспечивается как ив традиционном гидроприводе установкой предохранительных клапанов (на чертежах не показаны).
Гидропривод работает следующим образом.
Исходное положение. Распределитель б находится в средней позиции. Рабочая жидкость от насоса 10 по линиям 9. 11 поступает обратно в бак 12. Линии 7 и 8 заперты. Дополнительный распределитель 17 находится в позиции б при отсутствии давления в камере 19 управления.
Давление в камере 19 управления отсутствует, если давление в гидроаккумуляторе
18недостаточно для замыкания контакта 23 преобразователя давления 24. Тогда камера
19управления через пилот 20 соединена с баком 12, кроме случаев, когда в линию 13 подается сигнал управления на опускание стрелы.
Давление в камере 19 управления может отсутствовать и когда давление в гидроаккумуляторе 18 достаточно для замыкания контакта 23 и переключения пилота 20 в позицию, соединяющую камеру 19 управления с источником давления 21, если последний отключен, например, при выключении приводного двигателя. Это обеспечивает традиционное подключение гидроцилиндров 4 и 3 при транспортировке экскаватора или его длительной стоянке.
Дополнительный распределитель 17 находится в позиции а, если давление в гидроаккумуляторе 18 достаточно для замыкания контакта 23 преобразователя 24 и переключения пилота 20 в позицию, соединяющую камеру 19 управления с источником давления управления 21.
Подъем стрелы осуществляется переключением основного распределителя б на
подъем, соединяя линии 7 и 8 с линиями 9 и 11 соответственно. Это обеспечивается подачей сигнала управления в линию 14 (давление управления на фиг.2 или
электрический сигнал на фиг.З) от блока управления 15. В зависимости от того разряжен или заряжен гидроаккумулятор 18, то есть разомкнут или замкнут электроконтакт 23 преобразователя давления 24, пилот 20
сообщает камеру 19 управления дополнительного распределителя 17 с источником
21давления управления или баком 12. Поэтому при разряженном гидроаккумуляторе 18(первый подъем после сборки устройства)
5 дополнительный распределитель 17 остается в позиции б, подъем стрелы 1 будет обеспечиваться подачей рабочей жидкости от насоса 10 в полости подъема гидроцилиндров 3 и 4.
0 При заряженном гидроаккумуляторе 18 его давление зарядки замыкает электроконтакт 23 преобразователя давления 24 и переключает пилот 20. Поэтому давление управления источника давления 21 поступа5 ет в камеру 19 управления и переключает дополнительный распределитель 17 в позицию а. В этом случае в процессе подъема стрелы 1 в гидроцилиндр 3 поступает рабочая жидкость от насоса 10, а в гидроцилиндр
0 4 от гидроаккумулятора 18. ЕСли в процессе подъема гидроаккумулятор 18 разрядится до окончания подъема, что сопровождается падением давления на управляющем входе преобразователя давления 24, электрокон5 такт 23 разомкнется, пилот 20 соединит камеру 19 управления дополнительного распределителя 17с баком 12. Это вызовет переключение дополнительного распределителя 17 в позицию б. Другими словами,
0 произойдет автоматическое переключение полости 16 гидроцилиндра 4 к насосу 10.
Опускание стрелы осуществляется переключением основного распределителя б на опускание, соединяя линии 7 и 8 с лини5 ями 11 и 9 соответственно. Для этого подается сигнал в линию управления 13. Полости опускания гидроцилиндров 3 и 4 соединены с насосом 10, полость подъема гидроцилиндра 3 с баком 12, а полость подъема 16 с
0 гидроаккумулятором 18. При опускании стрелы 1 линия управления элеткромагнита
22оказывается связанной с источником электропитания 25 через замкнувшийся управляемый контакт 26 преобразователя дав5 ления 27, линия управления которого соединена с линией 13 управления на опускание стрелы (фиг.2) или через замкнувшийся управляемый контакт на опускание стрелы блока 15 управления (фиг.З). Таким образом при опускании стрелы 1 рабочая
жидкость из полости подъема 16 вытесняется в гидроаккумулятор 18 под действием веса стрелы и другого рабочего оборудования.
Необходимо отметить, что зарядка гид- роаккумулятора 18 всегда будет происходить на обьем не превышающий объем полости 16 гидроцилиндра 4,чем поддерживается оптимальный режим рекуперации энергии и исключается возможность пере- зарядки гидроаккумулятора 18. Перезарядка гидроаккумулятора могла бы привести к потерям рекуперируемой энергии на предохранительных клапанах.
При копании в полости копания гидро- цилиндра 31 ковша 32 появляется давление, достаточное для размыкания контакта 28 преобразователя давления 29, в результате чего линия управления электромагнита 22 оказывается обесточенной, пилот 20 пере- ключается, соединяя камеру 19 управления дополнительного распределителя 17 с баком 12. Дополнительный распределитель 17 переключается в позицию б, что исключает просадки стрелы при копании (фиг.З).
Необходимо отметить, что о процессе работы землеройной машины дополнительный распределитель 17 переключается в позицию б только в случае разрядки
гидроаккумулятора в конце подьема из-за утечек рабочей жидкости и, следовательно значительно уменьшено количество переключений дополнительного распределителя.
Формула изобретения Гидропривод землеройной машины, включающий первый и второй гидроцилиндры привода стрелы, соединенные с насосом и сливом через основной распределитель, связанный линиями управления с блоком управления дополнительный распределитель, соединенный камерой управления с пилотом и напорными линиями с полостями подьема первого и второго гидроцилиндров стрелы и гидроаккумулятором, который связан с линией управления преобразователя давления, отличающий- с я тем, что, с целью повышения надежности, пилот выполнен с возможностью сообщения в одной позиции камеры управления дополнительного распределителя с источником давления, а во второй позиции - со сливом, при этом линия управления пилота связана посредством управляемого контакта с источником электропитания и с электроконтактом преобразователя давления, который связан с источником электропитания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод стрелы экскаватора | 1990 |
|
SU1786228A1 |
| Гидропривод стрелы землеройной машины | 1989 |
|
SU1740574A1 |
| Гидропривод стрелы экскаватора | 1989 |
|
SU1745844A1 |
| Гидропривод стрелы одноковшового экскаватора | 1984 |
|
SU1273465A1 |
| Гидропривод стрелы одноковшовой землеройной машины | 1984 |
|
SU1273464A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1987 |
|
SU1726674A1 |
| Гидропривод стрелы землеройной машины | 1987 |
|
SU1666664A1 |
| Гидропривод рабочего оборудования погрузчика | 1985 |
|
SU1395774A1 |
| Гидропривод рабочего оборудования погрузчика | 1989 |
|
SU1666666A1 |
| ГИДРОПРИВОД СТРЕЛЫ ЭКСКАВАТОРА | 1995 |
|
RU2095523C1 |
Использование: гидропривод одинаковых экскаваторов, погрузчиков. Сущность изобретения: зарядка гидроаккумуляторз производится всегда на объем, не превышающий объем полости гидроцилиндра. Этим поддерживается оптимальный режим рекуперации энергии и исключается возможность перезарядки гидроаккумулятора. Опускание стрелы происходит с подключением полости подъема в позиции а дополнительного распределителя с гидроаккумулятором. Если в процессе подъема гидроаккумулятор разрядится до окончания подъема, пилот соединит камеру с баком. Это вызовет переключение дополнительного распределителя в позицию б, т.е. происходит автоматическое переключение полости гидроцилиндра к насосу. 3 ил.
31
{Ptltf
Г/
«-W.
h
/ЙОД
frOWeei
| Гидропривод стрелы землеройной машины | 1987 |
|
SU1666664A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
