Изобретение относится к области моделирования и может быть использовано при электродинамическом моделировании комплекса взаимосвязанных динамических режимов работы насосов систем машинного орошения (водоподъемные н-асосные установки).
Целью изобретения является расширение диапазона регулирования нагрузки и повышение чувствительности цепи управления обратной связи по скорости.
На фиг. 1 приведена принципиальная электрическая схема заявляемого устройства системы двигатель-насос.
Устройство для моделирования системы двигатель-насос содержит приводной двигатель 1, жестко связанный с генерато- .ром постоянного тока независимого возбуждения 2 и с тахогенератором 3, выход которого связан с первым регулируемым ре зистором 4 и аналого-цифровым преобразователем 5, выход аналого-цифрового
преобразователя через цифровой блок нелинейно степенного преобразования 6 связан с цифроаналоговым преобразователем 7, выход которого связан с обмоткой управления 8 электромашинного усилителя 9, выход электромашинного усилителя 9 через второй регулировочный резистор 10 связан с обмоткой независимого возбуждения 11 генератора постоянного тока 2. тиристорный преобразователь 12, подключенный в цепь обмотки якоря генератора постоянного тока 2, причем, положительный выход обмотки якоря генератора постоя иного тока подключен в анодную цепь тиристорного преобразователя, а его катодная цепь подключена к отрицательному выходу обмотки якоря генератора постоянного тока, питающий трансформатор (реактор) 13 тиристорного преобразователя 12, блок управления тиристорным преобразователем 14, подключенная к выходу цифроаналогового преобразователя, параллельно, к обмотке
fe
00 CJ GJ 00 GO VJ
управления 8 электромашинного усилителя 9.
Устройство для моделирования системы двигатель-насос работает следующим образом.
Приводной двигатель постоянного или переменного тока 1 приводит во вращение генератор постоянного тока независимого возбуждения 2 и тахогенератор 3.
Генератор постоянного тока 2 возбуждается от электромашинного усилителя 9, который в свою очередь, управляется обмоткой управления 8 через цифровой блок нелинейно-степенного преобразования 6, включенное в цепь обратной связи по скорости.
На вход цифрового блока нелинейно- степенного преобразования б через аналого-цифровой преобразователь 5 (АЦП) сигнал от тахогенератора 3 и через цифроа- налоговый преобразователь 7 (ЦАП) подается в обмотку управления 8 усилителя 9.
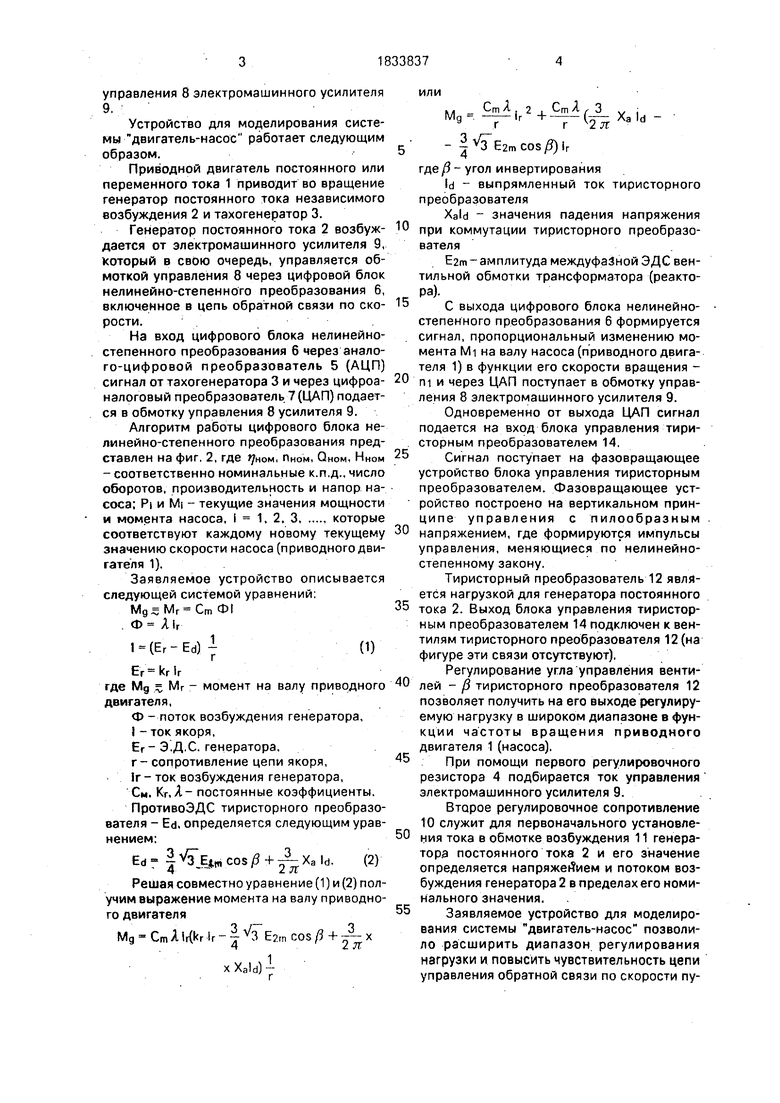
Алгоритм работы цифрового блока нелинейно-степенного преобразования представлен на фиг. 2, где /ном, пном, QHOM, Ином - соответственно номинальные к.п.д., число оборотов, производительность и напор насоса; PI и Mi - текущие значения мощности
и момента насоса, I 1, 2. 3 которые
соответствуют каждому новому текущему значению скорости насоса (приводного двигателя 1).
Заявляемое устройство описывается следующей системой уравнений;
Мд Мг СтФ1 . Ф Air
1 - (Er - Ed) j(1)
где Mg Mr - момент на валу приводного двигателя,
Ф - поток возбуждения генератора, 1 -ток якоря, ЕГ Э.Д.С. генератора, г- сопротивление цепи якоря, 1г - ток возбуждения генератора, См. Кг,Я- постоянные коэффициенты. ПротивоЭДС тиристорного преобразователя - Еа, определяется следующим уравнением:
Ed | cos /9 + Ха Id. (2)
Решая совместно уравнение (1) и (2) получим выражение момента на валу приводного двигателя
Mg - Cm Я iKkr Ir - | 3 E2m COS ft + - X xXald)ИЛИ
м СптЯ 2 i Cm Я , 3 Mg - Ir +-(2
Xa Id
3 V7c - 4 3 E2
0
5
0
5
0
COSyS) ir
где ft- угол инвертирования
Id - выпрямленный ток тиристорного преобразователя
Xald - значения падения напряжения при коммутации тиристорного преобразователя
Е2т - амплитуда междуфаЗной ЭД С вентильной обмотки трансформатора (реактора).
С выхода цифрового блока нелинейно- степенного преобразования 6 формируется сигнал, пропорциональный изменению момента Mi на валу насоса (приводного двигателя 1) в функции его скорости вращения - ги и через ЦАП поступает в обмотку управления 8 электромашинного усилителя 9.
Одновременно от выхода ЦАП сигнал подается на вход блока управления тири- сторным преобразователем 14,
Сигнал поступает на фазовращающее устройство блока управления тиристорным преобразователем. Фазовращающее устройство построено на вертикальном принципе управления с пилообразным напряжением, где формируются импульсы управления, меняющиеся по нелинейно- степенному закону,
Тиристорный преобразователь 12 является нагрузкой для генератора постоянного 5 тока 2. Выход блока управления тиристорным преобразователем 14 подключен к вентилям тиристорного преобразователя 12 (на фигуре эти связи отсутствуют).
Регулирование угла управления венти- 0 лей - /3 тиристорного преобразователя 12 позволяет получить на его выходе регулируемую нагрузку в широком диапазоне в функции частоты вращения приводного двигателя 1 (насоса).
При помощи первого регулировочного резистора 4 подбирается ток управления электромашинного усилителя 9.
Второе регулировочное сопротивление ТО служит для первоначального установления тока в обмотке возбуждения 11 генератора постоянного тока 2 и его значение определяется напряжением и потоком возбуждения генератора 2 в пределах его номинального значения.
Заявляемое устройство для моделирования системы двигатель-насос позволило расширить диапазон регулирования нагрузки и повысить чувствительность цепи управления обратной связи по скорости пу5
0
5
тем изменения угла управления - /Зтири- сторного преобразователя и подключением цифрового блока нелинейно-степенного преобразования в цепь управления обратной связи по скорости,
Формула изобретения Устройство для моделирования системы двигатель-насос, содержащее приводной двигатель, тахогенератор, уста- новленный на валу приводного двигателя, первый регулировочный резистор, подключенный одним выводом к первой клемме тахогенератора, второй регулировочный резистор, усилитель, тиристорный преобразо- ватель, блок управления тиристорным преобразователем, выходы которого подключены к управляющим электродам тири- сторного преобразователя, отличающееся тем. что, в него введены питающий трансформатор, подключенный входом к выходу тиристорного преобразователя, а выходом - к питающей сети, последовательно соединенные аналого-цифровой преобразователь, цифровой блок нелинейно-степенного преобразования и цифроаналого- вый преобразователь, вторая клемма тахогенератора и свободный вывод первого регулировочного резистора подключены к входам аналого-цифрового преобразователя, генератор постоянного тока независимого возбуждения собмоткой независимого возбуждения, установленный на валу приводного двигателя и подключенный положительным и отрицательным выходами обмотки якоря соответственно к анодам и катодам тиристоров тиристорного преобразователя, причем усилитель выполнен в виде электромашинного усилителя, обмотка якоря которого через второй регулировочный резистор подключена к обмотке незави- симого возбуждения генератора постоянного тока независимого возбуждения, а выход цифроаналогового преобразователя подключен к обмотке управления электромашинного усилителя и к входу блока управления тиристорным преобразователем.

| название | год | авторы | номер документа |
|---|---|---|---|
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1797095A1 |
| "Устройство для моделирования системы "двигатель-насос" | 1991 |
|
SU1833836A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ СИСТЕМЫ ДВИГАТЕЛЬ - НАСОС - ТРУБОПРОВОД | 1992 |
|
RU2065196C1 |
| Устройство для моделирования системы двигатель - насос | 1991 |
|
SU1830516A1 |
| Устройство для обучения операторов систем управления электроприводом постоянного тока | 1987 |
|
SU1441443A1 |
| Устройство для моделирования электромагнитной муфты скольжения | 1980 |
|
SU955115A1 |
| УСТРОЙСТВО для УЛУЧШЕНИЯ КОММУТАЦИИ КОЛЛЕКТОРНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН | 1969 |
|
SU248048A1 |
| Устройство управления электроприводом | 1983 |
|
SU1161920A1 |
| Привод наведения | 2021 |
|
RU2767023C1 |
| Учебный стенд по автоматизированному тиристорному реверсивному электроприводу постоянного тока | 1991 |
|
SU1778903A1 |
Изобретение относится к области моделирования и может быть использовано при электродинамическом моделировании комплекса взаимосвязанных динамических режимов работы насосов систем машинного орошения. Сущность изобретения: устройство содержит приводной двигатель (1), та- хогенератор (3), регулировочные резисторы
(ри.1
Ввод номинальных параметров
1Мс„ ПН6М
Олределение ft I
rac«5T Qi-.
Kuoul
.V
Расчёт Hi //„,„ ( -- )
4 HOW /
ft9, S-f Q; Hj
1
HOM
Расчёт /M ;
. f
HOM
| Дискретно-непрерывные автоматиче; ские системы, М.: Энергия, 1980, с.8, рис | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
