Изобретение относится к авиационной технике, а именно к инерциальным и курсовым системам, и может быть применено для их начальной выставки в азимуте.
Цель повышение точности определения стояночного курса гидросамолета.
Указанная цель достигается введением блока определения вспомогательного угла и использованием трех гидроакустических маяков-излучателей с известными координатами.
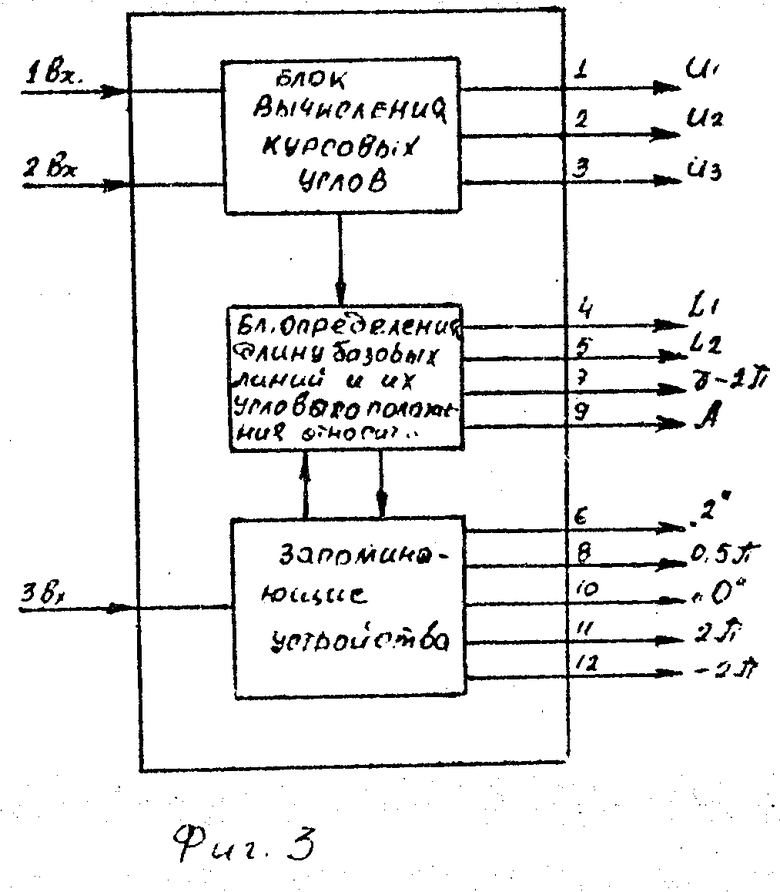
На фиг. 1 приведена структурная схема устройства для определения стояночного курса гидросамолета на поверхности моря; на фиг. 2 структурная схема блока определения вспомогательного угла; на фиг. 3 структурная схема вычислителя курсовых углов и базовых параметров.
Устройство определения стояночного курса гидросамолета на поверхности моря (фиг. 1) использует три гидроакустических маяка 1-3, содержит два гидроакустических приемника 4 и 5, задатчик координат маяков-излучателей 6, вычислитель курсовых углов и базовых параметров 7, блок определения вспомогательного угла 8, блок вычитания 32, пороговое устройство 33 и сумматор 34. Первый, второй приемники и задатчик координат маяков-излучателей подключены к первому, второму и третьему входам вычислителя курсовых углов и базовых параметров 7, к 1-8 выходам которого подключен блок определения вспомогательного угла 8, к 9 выходу подключен блок вычитания 32 и к 10-12 выходам подключено пороговое устройство 33. Второй вход блока вычитания 32 подключен к выходу блока определения вспомогательного угла 8, к выходу блока вычитания 32 подключены 4 вход порогового устройства 33 и 3 вход сумматора 34. Первый и второй входы сумматора 34 подключены к выходам порогового устройства 33.
Блок определения вспомогательного угла 8 (фиг. 2) содержит первый и второй блоки вычитания 9 и 10, подключенные к 1-3 входам данного блока, первый сумматор 11, подключенный к выходам первого и второго блоков вычитания 9 и 10, первый и второй блоки определения синуса 12 и 14, подключенные к выходам первого и второго блоков вычитания 9 и 10, первый и второй делители 13 и 15, подключенные к выходам блоков определения синуса аргумента 12 и 14, и соединен с 4 и 5 входами данного блока соответственно, третий блок вычитания 16, соединенный с седьмым входом данного блока и подключенный к выходу первого сумматора 11, блок определения косинуса аргумента 17, подключенный к выходу третьего блока вычитания 16, первый умножитель 18, подключенный к выходам первого, второго делителей 13 и 15 и блока определения косинуса аргумента 17, второй умножитель 19, подключенный к выходу первого умножителя 18 и к 6-му входу данного блока, третий и четвертый умножители 20 и 22, подключенные к выходам первого и второго делителей 13 и 15 соответственно. Второй сумматор 21 подключен к выходам второго, третьего умножителей 19 и 20, а третий сумматор 23 подключен к выходам второго сумматора 21 и четвертого умножителя 22. Третий блок определения синуса аргумента 24 подключен к выходу третьего блока вычитания 16, к выходу блока 24 подключен пятый умножитель 25. Третий делитель 26 подключен к выходам третьего сумматора 23 и пятого умножителя 25. К выходу третьего делителя 26 подключен блок извлечения квадратного корня 27. Шестой умножитель 28 подключен к выходам второго делителя 15 и блока извлечения квадратного корня 27, а блок определения арксинуса аргумента 29 подключен к выходу шестого умножителя 28. Четвертый блок вычитания 30 подключен к 3-му входу рассматриваемого блока 8 и к выходу блока 29, четвертый сумматор 31 подключен к 8-му входу рассматриваемого блока 8 и к выходу четвертого блока вычитания 30.
Блок вычисления курсовых углов и базовых параметров 7, показанный на фиг. 3, содержит блок вычисления курсовых углов, блок определения длины базовых линий между маяками и их угловых положений относительно геодезической сетки координат, постоянное и оперативное запоминающее устройство.
Устройство определения стояночного курса гидросамолета на поверхности моря работает следующим образом.
В запоминающее устройство вычислителя курсовых углов и базовых параметров 7 вводятся координаты маяков при помощи задатчика координат 6. По специальному сигналу маяки начинают излучать гидроакустические сигналы на присвоенных им частотах. Принадлежность сигнала к данному маяку обозначается его частотой. Разность времени прихода сигнала от маяка к двум разнесенным приемникам пропорциональна косинусу его курсового угла U.
U=arccos где С скорость распространения сигнала;
где С скорость распространения сигнала;
t1, t2 время приема сигнала соответствующим приемником,
l известное расстояние между приемниками.
Если сигнал принят правым гидрофоном второго приемника, то курсовой угол определяется как U=2π -U, т.е. курсовому углу всегда соответствует угол между направлением на маяк и продольной осью самолета по часовой стрелке. Маяку, курсовой угол которого имеет наибольшее значение, присваивается первый номер. и так далее согласно следующему условию U1>U2>U3.
В блоке определения длины базовых линий между приемоответчиками и их углового положения относительно геодезической сетки координат вычислителя курсовых углов и базовых параметров 7 определяются длины базовых линий L1, L2, L3. В этом же блоке определяется угол между базой L2 и восточным направлением местной параллели из точки расположения маяка N2.
Угол Y между базами L1 и L2 определяется по известной теореме косинусов согласно формуле
Y=arccos
Значения курсовых углов U1, U2, U3 поступают в блок определения вспомогательного угла 8 (фиг. 2). В первом и втором блоках вычитания 9 и 10 из значений курсовых углов первого и второго маяков U1, U2 вычитаются значения курсовых углов второго и третьего маяков U2, U3 соответственно. В блоках определения синуса аргумента 12 и 14 определяются значения синусов разностей курсовых углов sin(U1-U2) и sin(U2-U3). В делителях 13 и 15 значения синуса аргумента делятся на соответствующие базовые расстояния L1 и L2, т.е. а=sin(U1-U2)/L1, b= sin(U2-U3)/L2. В сумматоре 11 определяется сумма разностей курсовых углов в блоке вычитания 16 из значения выходного сигнала вычислителя 7 равным (2π -Y) вычитается выходной сигнал сумматора 11. Выходной сигнал блока вычитания 16 равен углу Q, определяемого следующим выражением:
Q=2π -Y-(U1-U2)-(U2-U3).
В блоке определения косинуса аргумента 17 определяется значение косинуса угла Q. В умножителе 18 выходной сигнал блока 17 перемножается с выходными сигналами делителей 13 и 15 равным значениям а и b. В умножителе 19 выходной сигнал умножителя 18 удваивается и становится равным значению (2abcosQ). В умножителях 20, 22 возводятся в квадрат выходные сигналы делителей 13, 15, а в сумматорах 21 и 23 суммируются выходные сигналы умножителей 19 и 20 и 21 и 23 соответственно. Выходной сигнал сумматора 23 равен значению (а2+2abcosQ+b2). В блоке определения синуса аргумента 24 определяется значение синуса угла Q (выходной сигнал блока 16), а в множителе 25 возводится в квадрат. В делителе 26 выходной сигнал умножителя 25 делится на выходной сигнал сумматора 23, а в блоке извлечения квадратного корня 27 извлекается корень из выходного сигнала делителя 26. Выходной сигнал блока 27 равен значению дальности D от самолета до второго маяка
D=[sin2Q(a2+2abccosQ+b2]0,5
В умножителе 28 сигнал из блока 27 умножается на выходной сигнал делителя 15, а в блоке определения арксинуса аргумента 29 определяется значение арксинуса сигнала из умножителя 28. В блоке вычитания 30 из значения курсового угла третьего маяка U3 (из 3-го выхода вычислителя курсовых углов базовых параметров 7) вычитается выходной сигнал блока 29. В сумматоре 31 к выходному сигналу блока вычитания 30 суммируется сигнал из 8-го выхода вычислителя 7, равным значению 0,5π. Выходной сигнал сумматора 31 равен значению вспомогательного угла, определяемого соотношением:
Н=0,5π-arcsin(D˙b)+U3
В блоке вычитания 32 из значения вспомогательного угла Н вычитается сигнал из 9-го выхода вычислителя 7, равный значению угла А. В пороговом устройстве 33 выходной сигнал блока 32 сравнивается с нулевым сигналом и сигналом равным значению 2π, поступающими из 10-го и 11-го выходов вычислителя 7. Если выходной сигнал блока 32 меньше нуля, то в сумматоре 34 к нему суммируется сигнал равный значению 2π. Если выходной сигнал блока 32 больше 2π, то к нему суммируется сигнал равный 2π. Выходной сигнал сумматора 34 равен значению курса гидросамолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
RU1797300C |
| Измеритель местоположения бурового судна | 1983 |
|
SU1134928A1 |
| Способ и устройство определения курса неманеврирующей аэродинамической цели с использованием выборки квадратов дальности | 2016 |
|
RU2621692C1 |
| Гидроакустическая система навигации акустической системы донных маяков | 1989 |
|
SU1838797A3 |
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| Устройство для преобразования координат | 1983 |
|
SU1141405A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОДВОДНЫХ ОБЪЕКТОВ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645016C1 |
| Устройство для воспроизведения кардиоиды | 1981 |
|
SU1007102A1 |
| Устройство для определения положения основания транспортного средства относительно земной поверхности | 1991 |
|
SU1812425A1 |
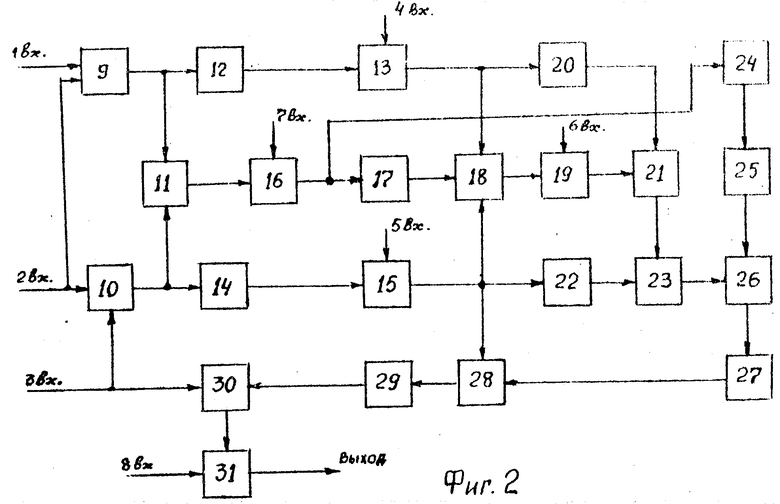
Изобретение относится к авиационной технике. Целью изобретения является повышение точности определения стояночного курса гидросамолета. Поставленная цель достигается путем введения третьего гидроакустического маяка-излучателя 3 и блока определения вспомогательного угла 8, причем восемь выходов блока вычитания курсовых углов и базовых параметров 7 соединены с соответствующими входами блока определения вспомогательного угла 8, девятый выход блока вычисления курсовых углов и базовых параметров соединен с первыми входами блока вычитания 32, десятый вход с первым входом блока сравнения 33, одиннадцатый вход с вторыми входами блока сравнения 33, двенадцатый вход с третьим входом блока сравнения 33, четвертый вход которого подключен к выходу блока вычитания 32. Второй вход блока вычитания 32 соединен с выходом блока определения вспомогательного угла 8, первый вход сумматора 34 соединен с первым выходом блока сравнения 33, второй вход с вторым выходом блока сравнения 33, а третий вход с выходом блока вычитания 32. 2 з. п. ф-лы, 3 ил.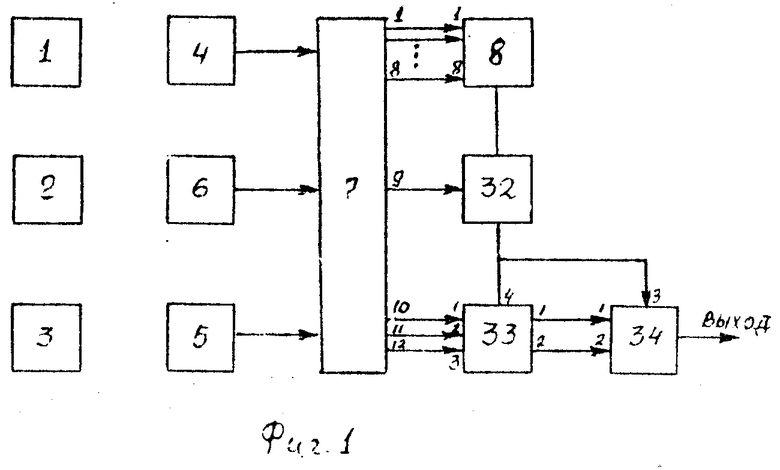
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
RU1797300C |
