ветственно к входам блока управления, с четвертого по шестой, которые подключены соответственно к второму входу первого и первому и второму входам третьего сумматоров по модулю два, выход которого соединен, свторым входом второго сумматора по мо1145 дулю два, четвертый и пятьй информационные входы коммутатора соединены соответственно с информационным входом устройства и выходом знака сумматора, выход старших разрядов счетчика аргумента соединенс управляющим входом коммутатора.

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой генератор развертки | 1979 |
|
SU834685A1 |
| Цифровой преобразователь координат | 1980 |
|
SU942004A1 |
| Специализированный процессор | 1983 |
|
SU1144117A1 |
| Устройство для вычисления функций @ и @ | 1980 |
|
SU978146A1 |
| Синусно-косинусный функциональный преобразователь | 1981 |
|
SU970357A1 |
| Цифровой генератор гармонических функций | 1983 |
|
SU1224802A1 |
| Цифровой преобразователь координат | 1977 |
|
SU742944A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Устройство для вычисления функций | 1978 |
|
SU824207A1 |
| Устройство для обработки данных при формировании диаграммы направленности антенной решетки | 1987 |
|
SU1462351A1 |


УСТРОЙСТВО ДНЯ ПРЕОБРАЗОВАНИЯ КООРДИНАТ, содержащее блок умножения, счетчик, сумматор, схему сравнения, генератор гармонических зависимостей и блок управления, причем генератор гармонических зависимостей содержит счетчик аргумента, блоки вьиисления синуса и косинуса, входы которых соединены с выходом младших разрядов счетчика аргумента, блок умножения содержит первый и второй регистры и первый и второй умножители, первые информационные входы которьк соединены с выходами соответствующих регистров, вторые информационные входы первого и второго умножителей подключены к выходам соответственно блока вычисления синуса и блока вычисления косинуса генератора гармонических зависимостей, выход старшего из группы младших разрядов счетчика аргумента которого соединен со стробирующим. входом схемы сравнения, выход которой соединен с входами разрешения счета умножителей бло-. ка умножения, выходы первого и второго умножителей соединены соответ-. ственно с входом счетчика и первым входом блока управления, второй вход и первьй и второй выходы которого соединены соответственно с выходом знака сумматора, входом суммирования и входом вычитания сумматора, отличающееся тем, что, с целью расширения класса решаемых задач путем обеспечения возможности вычисления значения синуса угла места, в него введены буферный регистр и коммутатор, причем блок управления содержит три сумматора по модулю два и два элемента 2H-IfflH, первые входы которых соединены с первым входом блока управления, входы первого и второго регистров блока умножения (Л соединены соответственно с первым и вторым выходами коммутатора, третий выход KjjToporo соединен с третьим,. входом блока управления, соединенным с вторыми входами элементов 2И-ИЛИ,, выходы которых соединены с первым и вторым выходами блока управления, 4: информационный выход которого соеди и нен с выходом устройства и первьм информационным входом коммутатора о второй и третий информационные входы СП которого соединены соответственно с выходом буферного регистра и выходом первого умножителя блока умноже1шя, второй вход блока управления соединен с первыми входами первого и второго сумматоров по модулю два, выходы которых подключены соответственно к третьим и четвертым входам элементов 2И-ИЛИ, первьй и второй входы схемы сравнения соединены соответственно с четвертым и пятым выходами коммутатора, выходы с шестого по восьмой которого подключены соот
1
Изобретение относится к автоматике и вычислительной технике и может быть использовано в специализированных вычислительных средствах информационно-измерительных систем ив радиоэлектронных устройствах.
При решении ряда задач управления и измерения возникает необходимость вычисления синуса угла места. Эта операция, например, применяется в устройствах стабилизации, когда не обходимо стабилизировать по углу мес та характеристику направленности (далее ХН) антенньи Задача определения синуса угла места сводится к вычислению формулы
sin Ф sintcos-jx:os9+(sin q sin -у-cos q sinScos )cosE , (1)
где Ф - угол местаj .
q - истинньй угол места;
Е - истинный курсовой угол;
S - угол дифферента,
j - угол крена.
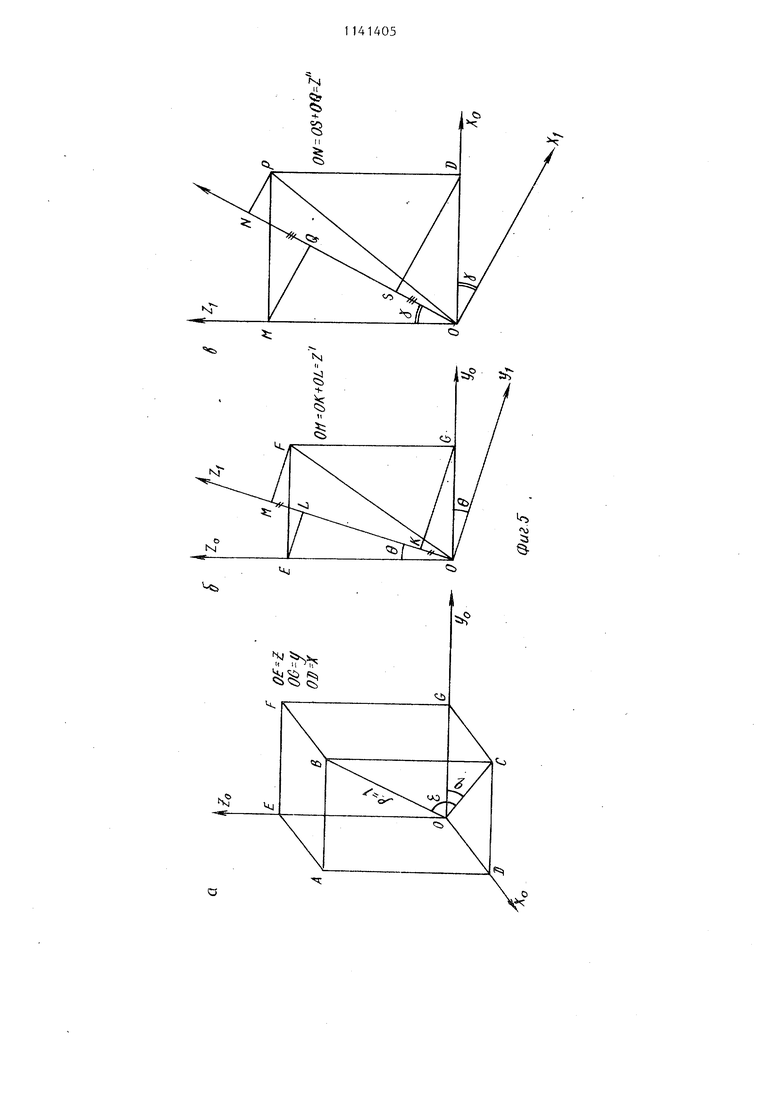
- Операция вычисления формулы (1) может быть сведена к следукядим преобразованиям:
определению проекций единичного радиус-вектора р на оси трехмерной системы координат (X,Y,Z) по истинно му углу места :
cos i.t
sin € - проекция на ось Z (2)
л
и по истинному курсовому углу q:
cos sin q - (проекция на ось X);
cos g cos q - (проекция на ось Y),
повороту системы координат (X,Y, Z) вокруг оси X на угол дифферента & , в результате которого мы получаем проекцию радиус-вектора на ось Z в новой системе координат (X,Y ,Z ):
sin cos в -cosEcos q sin б z ,(4)
повороту системы координат (X, Y Z ) вокруг оси Y на угол крена j-, что дает проекцию единичного радиус-вектора на ось Z в новой системе ко.ординат, X, Y , Z
cos sin q sin + (sin 8 cos В--cos q cos q sin 0 )cos-J- Z (5)
Очевидно, что формулы (1) и (5) тождественны друг другу.
Таким образом решение задачи производится в четыре этапа-:
разложение единичного радиус-вектора на ортогональные составлягацие по истинному углу места . согласно формул (2);
определение проекций единичного радиус-вектора по истинному курсовому углу q согласно формул (3),
определение проекции единичного радиус-вектора в новой системе координат X, Y , Z после поворота на угол дифферента 6 системы координат (X, Y, Z) согласно формуле (4),
определение величины синуса угла места в системе координат (Х , Y , , образованной поворотом систем координат (X, Y, z) на угол крена у согласно формуле (5),
Известно аналоговое электромеханическое счетно-решающее устройство Cl 3Устройство имеет ряд недостатков, присущих электромеханическим устройствам: значительные габариты, вес и электропотребление, невысокую надежность, малое быстродействие., а также большие кинематические и динамические ошибки.
Наиболее близким по технической сущности к изобретению является устройство, содержащее блок управления, счетчик, сумматор, блок умножения, первый выход которого подключен к входу счетчика, а второй - к первому входу блока управления, вторым входом подключенного к первому выходу сумматора, входы которого соединены с выходами блока управления, схему сравнения, генератор, первый и второ выходы которого подключены к первому и второму входам блока умножения, а третий выход - к первому входу схемы |Сравнения, выходом соединенной с третьим входом блока умножения. : Устройство реализует числоимпуль|сный способ преобразования координат Достоинством этого устройства является простота схемного решения, высокая точность вычисления, малые габариты С2 .
Однако с помощью известного устройства нельзя реализовать задачу вычисления синуса угла места.
Целью изобретения является расширение функциональных возможностей устройства путем вычисления синуса угла места.
Поставленная цель достигается тем что в устройство, содержащее блок умножения, счетчик, сумматор, схему сравнения, генератор гармонических зависимостей и блок управления, причем генератор гармоническ гх зависимостей содержит счетчик аргумента, блок вычисления синуса и блок вычисления косинуса, входы которых соединены с выходом младших разрядов счетчика аргумента, блок умножения содержит первый и второй регистры и первый и второй умножители, первые информационные входы которых соединены с выходами соответствукицих. регистров, вторые информационные входы первого и второго умножителей подключены к выходам соответственно блока вычисления синуса и блока вычисления косинуса генератора гармонических зависимостей, вход счетчика аргумента которого соединен с стробирующим входом схемы сравнения выход которой соединен с входами разрешения счета умножителей блока умножения, выходы первого и второго умножителей - соответственно с входом счетчика и первым входом блока управления, второй вход и первьй и второй выходы которого соединены соН ответственно с выходом знака сумматора, входом суммирования и вычитания сумматора, и коммутатор, введены буферный регистр и коммутатор, причем блок управления содержит три сум матора по модулю два и два элемента 2И-ИЛИ, первые входы которых соединены с первым входом блока управления, входы первого и второго регистров блока умножения - соответстветственно с первым и вторым выходами коммутатора, третий выход которого соединен с третьим входом блока управления, соединенным с вторыми входами элементов 2И-ИЛИ, выходами соединенньЬс с первым и :рторь м выходами блока управления, информационный выход сумматора соединен с выходом устройства и первым информационным входом коммутатора, второй и третий информационные входы которого соединены соответственно с выходом буферного регистра и выходом первого умножителя блока умножения, второй вход блока управления - с первыми входами первого и второго сумматоров по модулю- два, выходы которых подключены соответственно к третьим и четвертым входам элементов 2И-ШЩ, первьй и второй входы схемы сравнения соединены соответственно с четвертым и пятым выходами коммутатора, выходы с шестого по восьмой которого подключены соответственно к входам с четвертого по шестой блока управления, которые подключены соответственно к второму входу первого и первому и второму входам третьего сумматора по модулю два, выходом соединенного с вторым входом второго сумматора по модулю два, четвертый и пятьй информационные входы коммутатора соединены соответственно с информационным входом устройства и выходом знака сумматора, выход старших разрядов счетчика аргумента - с управляющим входом коммутатора.
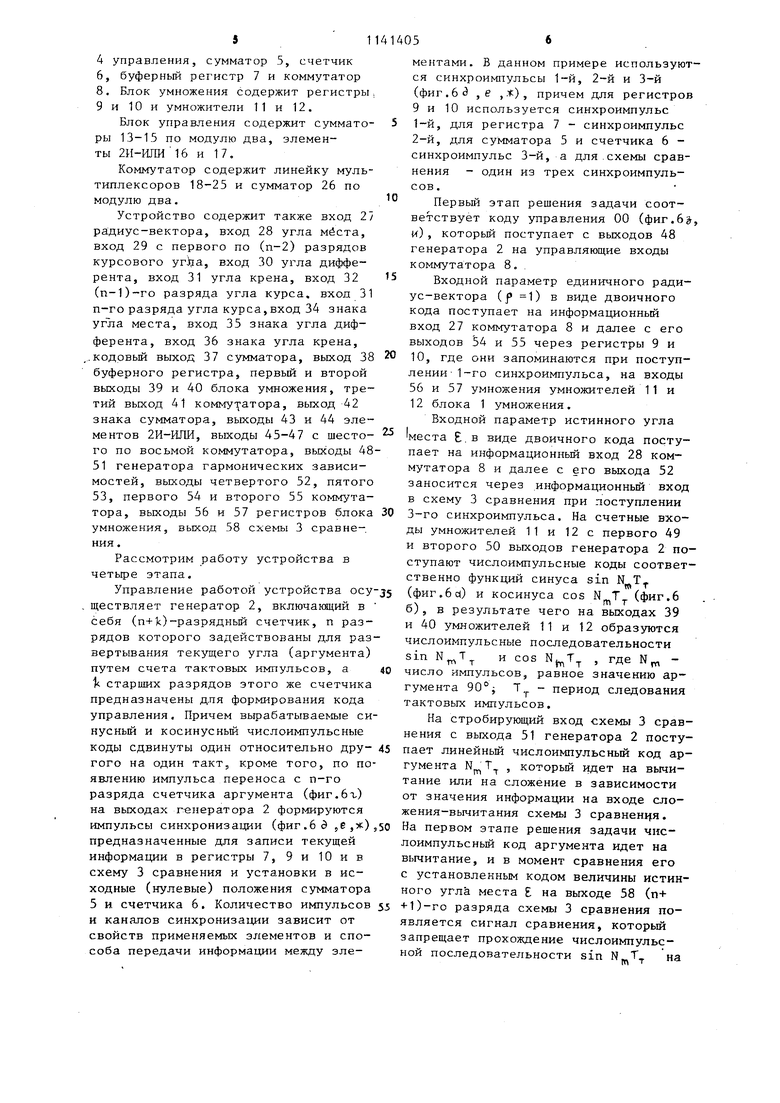
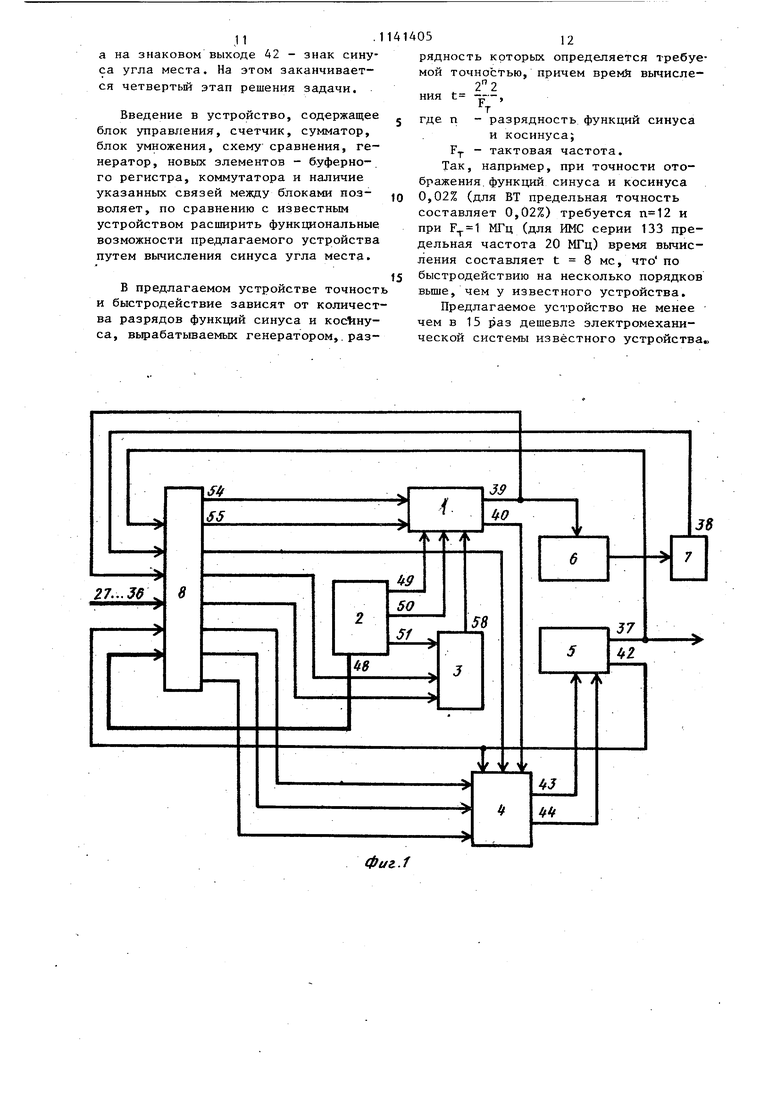
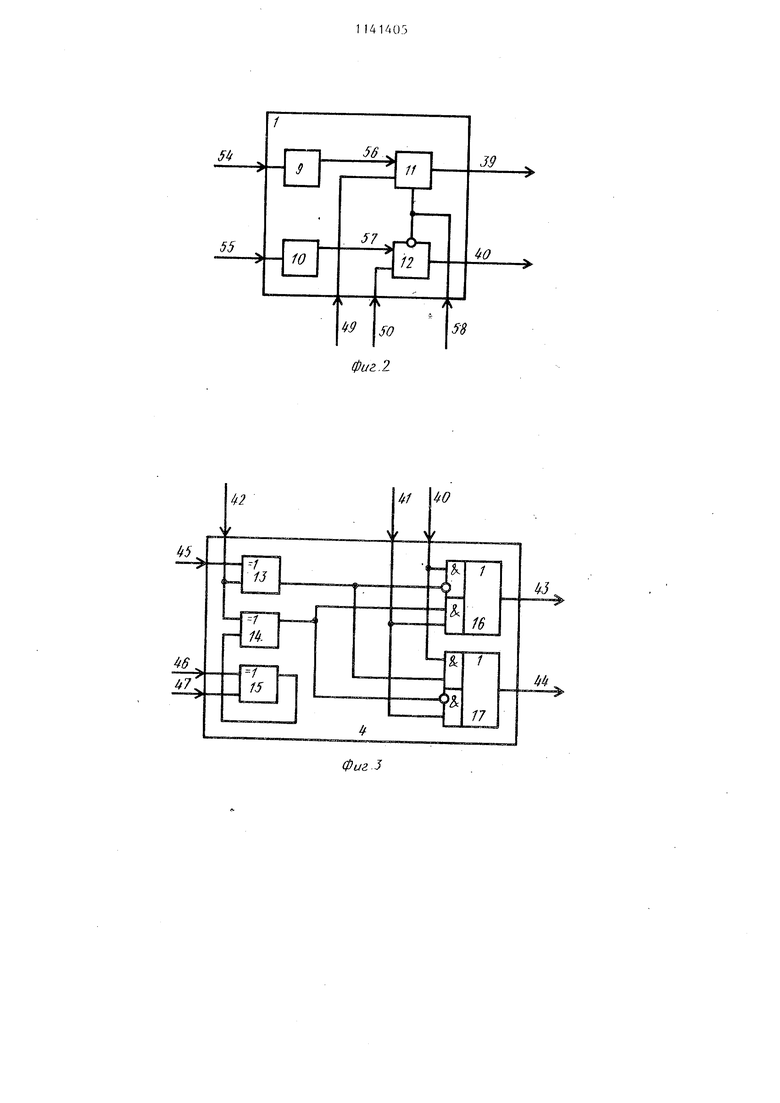
На фиг.1 представлена блок -схема устройства, на фиг.2-4 - функциональные схемы соответственно блока умножения, блока управления и коммутатора на фиг.5 - схема, поясняющая алгоритм работы устройства на фиг.6 - временная диаграмма работы устройства..
Устройство содержит блок 1 умножения, генератор 2 гармонических за висимостей, схему 3 сравнения, блок 51 4 управления, сумматор 5, счетчик 6, буферный регистр 7 и коммутатор 8. Блок умножения содержит регистры 9 и 10 и умножители 11 и 12. Блок управления содержит сумматоры 13-15 по модулю два, элементы 2Н-ИЛИ 16 и 17. Коммутатор содержит линейку мультиплексоров 18-25 и сумматор 26 по модулю два. Устройство содержит также вход 27 ра:диус-вектора, вход 28 угла места, вход 29 с первого по (п-2) разрядов курсового yrija, вход 30 угла дифферента, вход 31 угла крена, вход 32 (n-l)-ro разряда угла курса, вход 31 п-го разряда угла курса,вход 34 знака угла места, вход 35 знака угла дифферента, вход 36 знака угла крена, ..кодовый выход 37 сумматора, выход 38 буферного регистра, первый и второй выходы 39 и 40 блока умножения, третий выход 41 коммутатора, выход 42 знака сумматора, выходы 43 и 44 элементов 2И-ИЛИ, выходы 45-47 с шестого по восьмой коммутатора, выходы 48 51 генератора гармонических зависимостей, выходы четвертого 52, пятого 53, первого 54 и второго 55 коммутатора, выходы 56 и 57 регистров блока умножения, выход 58 схемы 3 сравне-. ния. Рассмотрим работу устройства в четыре этапа. Управление работой устройства осу , ществляет генератор 2, включающий в себя (п+1с)-разрядньй счетчик, п разрядов которого задействованы для раз вертывания текущего угла (аргумента) путем счета тактовых импульсов, а ) старших разрядов этого же счетчика предназначены для формирования кода управления. Причем вырабатываемые си нусный и косинусньй числоимпульсные коды сдвинуты один относительно другого на один такт, кроме того, по по явлению импульса переноса с п-го разряда счетчика аргумента (фиг.бг) на выходах г-енератора 2 формируются импульсы синхронизации (фиг.бЭ ,6 ,|) предназначенные для записи текущей информации в регистры 7, 9 и 10 и в схему 3 сравнения и установки в исходные (нулевые) положения сумматора 5 и счетчика 6. Количество импульсов
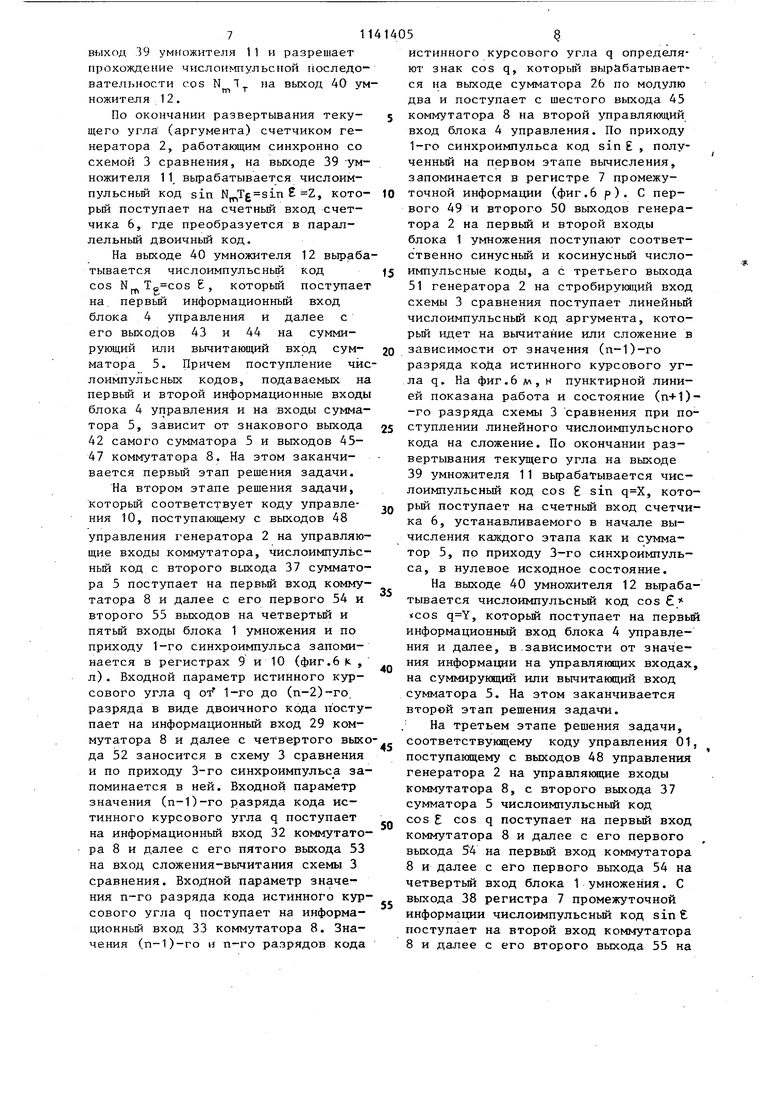
н каналов синхронизации зависит от свойств применяемых элементов и способа передачи информации между элеявляется сигнал сравнения, который запрещает прохождение числоимпульсной последовательности sin N.,T на 5 ментами. В данном примере используются синхроимпульсы 1-й, 2-й и 3-й (фиг.бЭ ,е ,ж), причем для регистров 9 и 10 используется синхроимпульс 1-й, для регистра 7 - синхроимпульс 2-й, для сумматора 5 и счетчика 6 синхроимпульс 3-й, а для,схемы сравнения - один из трех синхроимпульсов . Первьм этап решения задачи соответствует коду управления 00 (фиг.6, и), который поступает с выходов 48 генератора 2 на управляющие входы коммутатора В. . Входной параметр единичного радиус-вектора (f 1) в виде двоичного кода поступает на информационный вход 27 коммутатора 8 и далее с его выходов 54 и 55 через регистры 9 и 10, где они запоминаются при поступлении- 1-го синхроимпульса, на входы 56 и 57 умножения умножителей 11 и 12 блока 1 умножения. Входной параметр истинного угла места .в виде двоичного кода поступает на информационный вход 28 коммутатора 8 и далее с его выхода 52 заносится через информационный вход в схему 3 сравнения при поступлении 3-го синхроимпульса. На счетные входы умножителей 11 и 12 с первого 49 и второго 50 вькодов генератора 2 поступают числоимпульсные коды соответственно функций синуса sin N Т. ,, ,W т (фиг.бй) и косинуса cos N (фиг.6 б), в результате чего на выходах 39 и 40 умножителей 11 и 12 образуются числоимпульсные последовательности sin и cos , где N число импульсов, равное значению аргумента 90°j т период следования тактовых импульсов. На стробирующий вход схемы 3 сравнения с выхода 51 генератора 2 поступает линейньм числоимпульсный код аргумента , которьм идет на вычитание или на сложение в зависимости от значения информации на входе слоения-вычитания схемы 3 сравнения, На первом этапе решения задачи чнсоимпульсньм код аргумента идет на вычитание, и в момент сравнения его установленным кодом величины истиного угла места на выходе 58 (п+ 1)-го разряда схемы 3 сравнения по71выход 39 умножителя 11 и разрешает прохождение чнслоиипульспой носледо- на выход 40 ум вательности cos N 1 m т ножителя 12. По окончании развертывания текущего угла (аргумента) счетчиком генератора 2, работающим синхронно со схемой 3 сравнения, на выходе 39 -умножителя 11, вырабатывается числоимпульсный код sin sin Z, который поступает на счетньш вход счетчика 6, где преобразуется в параллельный двоичный код. На выходе 40 умножителя 12 выраба тывается числоимпульсный код COS &, которьш поступает на первьй информационный вход блока 4 управления и далее с его выходов 43 и 44 на суммирующий или вычитающий вход сумматора 5. Причем поступление чис лоимпульсных кодов, подаваемых на первый и второй информационные входы блока 4 управления и на входы сумматора 5, зависит от знакового выхода 42 самого сумматора 5 и выходов 45- 47 коммутатора 8. На этом заканчивается первый этап решения задачи. На втором этапе решения задачи, которьм соответствует коду управления 10, поступающему с выходов 48 управления генератора 2 на управляющие входы коммутатора, числоимпульсньй код с второго выхода 37 сумматора 5 поступает на первый вход коммутатора 8 и далее с его первого 54 и второго 55 выходов на четвертьм и пятьш входы блока 1 умножения и по приходу 1-го синхроимпульса запоминается в регистрах 9 и 10 (фиг.6 к , л). Входной параметр истинного курсового угла q от 1-го до (п-2)го разряда в виде двоичного кода поступает на информационньш вход 29 коммутатора 8 и далее с четвертого вых да 52 заносится в схему 3 сравнения и по приходу 3-го синхроимпульса за поминается в ней. Входной параметр значения (n-l)-ro разряда кода истинного курсового угла q поступает на информационный вход 32 коммутато ра В и далее с его пятого выхода 53 на вход сложения-вьиитания схемы 3 сравнения. Входной параметр значения разряда кода истинного кур сового угла q поступает на информационный вход 33 коммутатора 8. Значения (n-l)-ro и п-го разрядов кода 5 истинного курсового угла q определяют знак cos q, который вырабатывается на выходе сумматора 26 по модулю два и поступает с шестого выхода 45 коммутатора 8 на второй управляющий вход блока 4 управления. По приходу 1-го синхроимпульса код sin , полученный на первом этапе вычисления, запоминается в регистре 7 промежуточной информации (фиг.6 р). С первого 49 и второго 50 выходов генератора 2 на первый и второй входы блока 1 умножения поступают соответственно синусньш и косинусньм числоимпульсные коды, а с третьего выхода 51 генератора 2 на стробирукяций вход схемы 3 сравнения поступает линейньш числоимпульсный код аргумента, который идет на вычитание или сложение в зависимости от значения (n-l)-ro разряда кода истинного курсового угла q. На фиг.6 м, н пунктирной линией показана работа и состояние ()-го разряда схемы 3 сравнения при поступлении линейного числоимпульсного кода на сложение. По окончании развертывания текущего угла на выходе 39 умножителя 11 вырабатывается числоимпульсный код cos sin , который поступает на счетньш вход счетчика 6, устанавливаемого в начале вычисления каждого этапа как и сумматор 5, по приходу 3-го синхроимпульса, в нулевое исходное состояние. На выходе 40 умногхителя 12 вьфабатывается числоимпульсный код cos cos , которьй поступает на первьй информационный вход блока 4 управления и далее, в .зависимости от значения информации на управляющих входах, на суммируняций или вычитающий вход сумматора 5. На этом заканчивается второй этап решения задачи. На третьем этапе решения задачи, соответствукнцему коду управления 01, поступающему с выходов 48 управления генератора 2 на управпякмцие входы коммутатора 8, с второго выхода 37 сумматора 5 числоимпульсный код cos cos q поступает на первьй вход коммутатора 8 и далее с его первого выхода на первьй вход коммутатора 8 и далее с его первого выхода 54 на четвертьй вход блока 1 умножения. С выхода 38 регистра 7 промежуточной информации числоимпульсньй код sin поступает на второй вход коммутатора 8 и далее с его второго выхода 55 на пятьй вход блока 1 умножения. Со зна кового выхода 42 сумматора 5 код зна ка величины cosE cos q поступает на четвертьй вход сумматора 8 и далее с его седьмого выхода 46 на третий управляющий вход блока 4 управления Входной параметр угла дифферента 6 в виде двоичного кода поступает на информационньй вход 30 коммутатора 8 и далее с его четвертого выхода 52 заносится через информационньй вход в схему 3 сравнения. Входной параметр знака истинного угла места Зн поступает на информационньй вход 34 коммутатора 8 и далее с его шестого выхода 45 на второй управляющий вход блока 4 управления. Входной параметр знака угла дифферента Энб поступает на информационньй вход 35 коммутатора 8 и далее с его BocbMoio выхода 47 на четвертьй управляющий вход блока 4 управления Код cos sin q запоминается в регист ре 7 промежуточной информации. Совместная работа генератора 2, схемы 3 сравнения и блока 1 умножения 1 происходит аналогично их работе на первых двух этапах. По окончании развертывания текущего угла счет чиком аргумента генератора 2 на выходе 39 умножителя 11 вырабатывается числоимпульсньй код cos cos q sin & которьй поступает на третий вход коммутатора 8 и далее -с его третьего выхода 41 на второй информационньй вход блока 4 управления, на первьй информационньй вход которого с выхода 40 умножителя 12 поступает выработанньй числоимпульсньй код sinE Icos б . С, выходов 43 и 44 блока 4 уп равления числоимпульсные коды поступают на соответствующие входы сумматора 5, которьй производит опера1щю алгебраического суммирования sin Е. cos в-cos cos q sin 8 Z (на фиг.6,о показано суммирование кодов sin cos 0 + cos . cos q sin б ) , На этом заканчивается третий этап решения задачи. Четвертьй этап решения задачи соответствует коду управления 11, кото рый подается с выходов 48 управления генератора 2 на управлякяцие входы коммутатора 8. Числоимпульсньй код sinE cos S cosE cos q sin 9 с второго выхода 3 сумматора 5 поступает на первьй вход коммутатора 8 и далее с его второго выхода 55 на пятьй вход блока 1 умножения. С выхода 38 буферного регистра 7 числоимпульсньй код cosE sin q поступает на второй вход ко 1мутатора 8 и далее с его первого выхода 54 на четвертый вход блока 1 умножения. Со знакового выхода 42 сумматора 5 код знака величины (sint cos б - cosE i:cos q sin Q )поступает на четвертьй вход коммутатора 8 и далее с его шестого выхода 45 на второй управляющий вход блока 4 управления. Входной параметр угла крена у в виде двоичного кода поступает на информационньй вход 31 коммутатора 8 и далее с его четвертого вьЕхода 52 заносится в схему 3 сравнения. Входной параметр значения п-го разряда кода истинного курсового угла q поступает на информационньй вход 33 коммутатора 8 и далее с его седьмого выхода 46 на третий управляющий вход блока 4 управления. Входной параметр знака угла крена Эн поступает на информационньй вход 36 коммутатора 8 и далее с его восьмого выхода 47 на четвертьй управляющий вход блока 4 управления-. С первого 49 и второго 50 выходов генератора 2 на соответствующие входы блока 1 умножения поступает синусньй и косинусньй числоимпульсные коды, а с третьего выхода 51 .генератора 2 на тактовьй вход схемы 3 сравнения поступает на вычитание линейньй числоимпульсньй код аргумента. По окончании развертьшания текущего угла (аргумента) с первого выхода блока 1 умножения числоимпульсньй код cosE sin q sin поступает на третий вход коммутатора 8 и далее с его третьего выхода 41 на второй информационньй вход блока 4 управления, на первьй информационньй вход которого с второго выхода 40 блока 1 умножения поступает числоимпульсньй . код (sin Е cos 0 - cos cos q sin 6) cos T. С выходов 43 и 44 блока 4 управления числоимпульсные коды, в зависимости от информации на управляющих входах блока 4 управления, поступают на соответствующие входы сумматора 5, на втором выходе 37 которого получаем двоичньй код величины синуса угла места sin Ф Z cos sin q sinv+(sin e cos0 -cos Ecos q sin S) cosy. а на знаковом выходе 42 - знак синуса угла места. На этом заканчивается четвертьй этап решения задачи. Введение в устройство, содержащее блок управления, счетчик, сумматор, блок умножения, схему сравнения, генератор, новых элементов - буферного регистра, коммутатора и наличие указанных связей между блоками позволяет, по сравнению с известным устройством расширить функциональные возможности предлагаемого устройства путем вычисления синуса угла места. В предлагаемом устройстве точност и быстродействие зависят от количест ва разрядов функций синуса и кос 1нуса, вырабатываемых генератором,. раз.
Фиг..1 0512 рядность которых определяется требуемой точностью, причем времй вьгчисле- 2 2 ния t if-, т где п - разрядность функций синуса и косинуса; FT- - тактовая частота. Так, например, при точности отображения, функций синуса и косинуса 0,02% (для ВТ предельная точность составляет 0,02%) требуется и при МГц (для ИМС серии 133 предельная частота 20 МГц) время вычисления составляет t 8 мс, что по быстродействию на несколько порядков выше, чем у известного устройства. Предлагаемое устройство не менее чем в 15 раз дешевла электромеханической системы известного устройства
фиг
,5j4
«г «X
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преснухин Л.Н., Смирнов О.М | |||
| и др | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приводный механизм в судовой турбинной установке с зубчатой передачей | 1925 |
|
SU1965A1 |
| Телефонно-осведомительный аппарат | 1921 |
|
SU306A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для преобразования координат | 1977 |
|
SU726534A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
