о х
2. Измеритель по п. 1, отличающийся тем, что преобразователь координат содержит с первого по четвертый множительные элементы, инвертор, первый и второй сумматоры, первые входы первого и четвертого, первые входы второго и третьего, вторые входы второго и четвертого множительных элементов являются входами косинуса и синуса курсового угла и первым входом смещений судна преобразователя соответственно, вход инвертора и второй
вход первого множительного элемента являются вторым входом смещений судна преобразователя, выходы первого и второго, выходы третьего и четвертого множительных элементов соединены соответственно с первым и вторым входами первого и второго сумматоров, выходы которых являются первым и вторым выходами смещений судна в земной системе координат преобразователя, выход инвертора соединен с вторым входом третьего множительного элемента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система динамической стабилизации судна | 1985 |
|
SU1308040A1 |
| СПОСОБ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2572403C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРОВ ВОЗДУШНОЙ И ЗЕМНОЙ СКОРОСТЕЙ, УГЛА СНОСА ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНОЕ ЛАЗЕРНОЕ УСТРОЙСТВО ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2238521C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2313067C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ УСТРОЙСТВ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ ЕГО КОРПУСА | 2015 |
|
RU2599285C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
| УСТРОЙСТВО ОБРАБОТКИ НАВИГАЦИОННОЙ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2012896C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ СМЕЩЕНИЯ ЦЕНТРА МАСС АППАРАТА | 2000 |
|
RU2176810C2 |
1. ИЗМЕРИТЕЛЬ МЕСТОПОЛО.ЖЕНИЯ БУРОВОГО СУДНА, содержащий датчик углов наклона троса, датчик длины троса и вычислитель, информационные входы которого подключены соответственно к выходам датчиков угла наклона и длины троса, о т личающийся тем, что, с целью повышения точности измерителя , в него введены датчик курса, первый и второй вычитатели, первый и второй интеграторы и преобразователь координат, первый и второй входы смещений судна и входы синуса и косинуса курсового угла преобразователя координат соединены с соответствукщими выходами вычислителя и датчика курса, первый и второй выходы смещений судна в земной системе координат преобразователя кодов подключены соответственно к i первым входам первого и второго вычитателей, выходы которых являютtf) ся выxoдa JИ измерителя и подключены соответственно через первый и второй интеграторы к вторым входам первого и второго вычитателей. .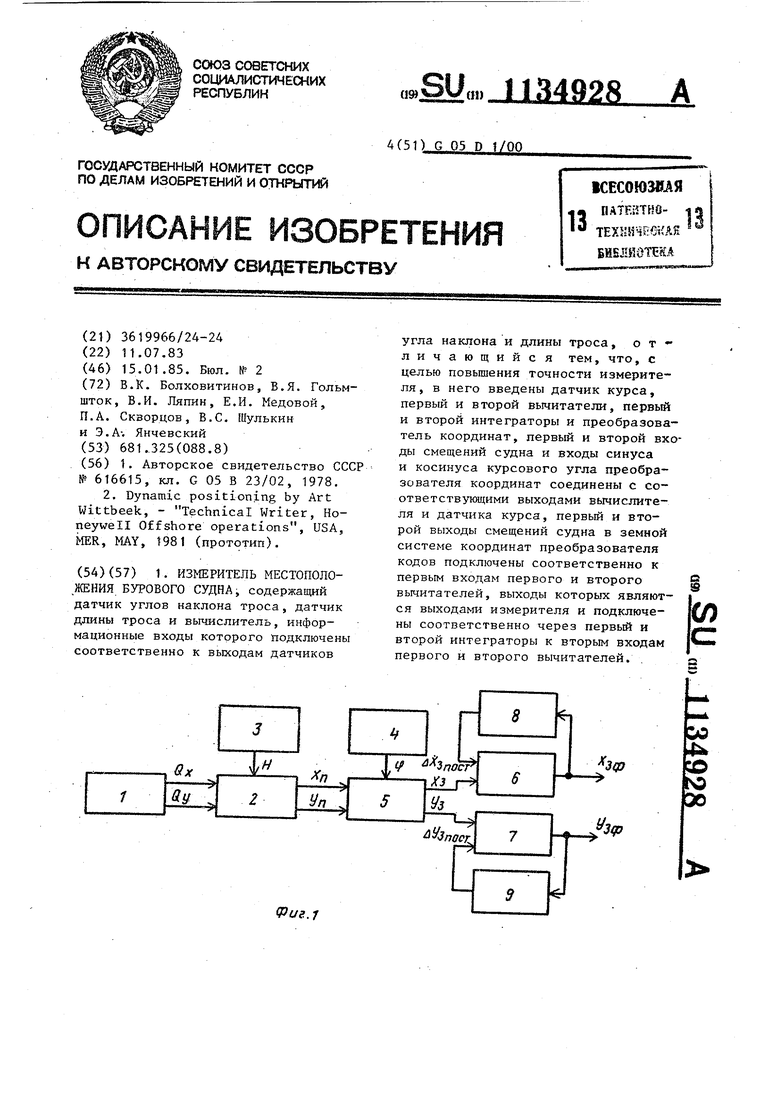
Изобретение относится к области автоматики, предназначено для контроля смещений буровых судов относительно буровой скважины и может быть использовано в системах динамигческой стабилизации буровых судов оборудованных инклинометрическими измерителями координат местоположения судна.
Для осуществления буровых работ в открытом море буровое судно (платформа) , подверженное действию ветра течению и морскому волнению, должно стабилизироваться относительно точки бурения для предотвращения поломок бурового инструмента. При этом в систему стабилизации должна поступать информащ1я о величинах линейных смещений судна относительно точки бурения от измерителей координат местоположения судна. В качестве одного из типов указанных измерителей современные буровые суда оборудуются инклинометрическими системами определения местоположения судна, называемыми также системами определения местоположения с туго натянутым тросом.
Известен измеритель местоположения бурового судна, содержащий в ка честве измерителей координат судна инклинометрический и гидроакустический датчики местоположения судна ij .
Недостатком устройства является малая точность.
Наиболее близким по технической сущности к предлагаемому является
измеритель местоположения бурового судна, содержащий датчик угла наклона троса, датчик длины троса и вычислитель, информационные входы которого подключены соответственно к выходам датчиков угла наклона и длины троса 21 .
Недостатком устройства является его ограниченная точность.
Цель изобретения - повьшгение точности устройства.
Указанная цель достигается тем, что в измеритель местоположения бурового, судна, содержащий датчик углов наклона троса, датчик длины троса и вычислитель 5 информационные входы которого подключены соответственно к выходам датчиков угла наклона и длины троса, введены датчик курса, первый и второй вычитатели, первый и второй интеграторы и преобразователь координат, первый и второй входы смещений судна и входы синуса и косинуса курсового угла преобразователя координат соединены с соответствующими выходами вьгчислителя и датчика курса первый и второй выходы смещений судна в земной системе координат преобразователя кодов подключены соответственно к первым входам первого и второго вычитателей, выходы которых являются выходами измерителя и подключены соответственно через первый и .второ интеграторы к вторым входам первого и второго вычитателей.
Преобразователь координат содержит с первого по четвертый множи3
тельные элементы, инвертор, первый и второй сз мматоры, первые входы первого и четвертого,-первые входы второго и третьего, вторые входы второго и четвертого множительных элементов являются входами косинуса и синуса курсового угла и первым входом смещений судна преобразователя соответственно, вход инвертора и второй вход первого множительного элемента являются вторым входом смещений судна преобразователя, выходы первого и второго, выходы третьего и четвертого множительных элементов соединены соответственно с первым и вторым входами первого и второго сумматоров, выходы которых являются первым и вторым выходами смещений судна в эемной системе координат преобразователя, выход инвертора соединен с вторым входом третьего множительного элемента.
На фиг. 1 представлена схема измерителя, на которой обозначены датчик углов наклона троса t, вычислитель 2, датчик длины троса 3, датчик курса 4, преобразователь координат 5, первый и второй вычитатели & и 7, первый и второй интеграторы 8 и 9.
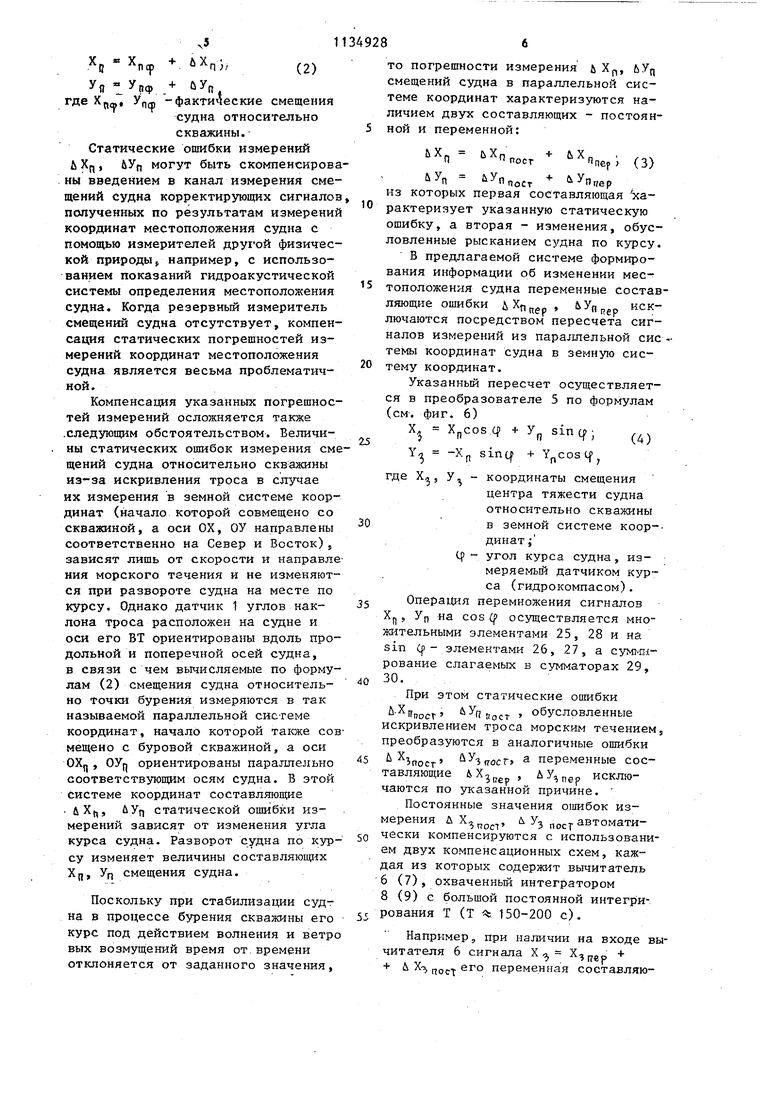
На фиг, 2 представлена схема датчика 1 углов наклона троса, на-которой изображены два взаимно перпевдикулярных вращающихся трансформатора (ВТ), оси которых ориентированы соответственно вдоль продольной и поперечной осей судна, статоры 10, 11 которых механически связаны с демпфированньп пи маятниками 12, t3 обеспечивающими ориентацию статоров ВТ по вертикали, а роторы 14, 15 через направляющие 16, 17 соединены с измерительным тросом 18
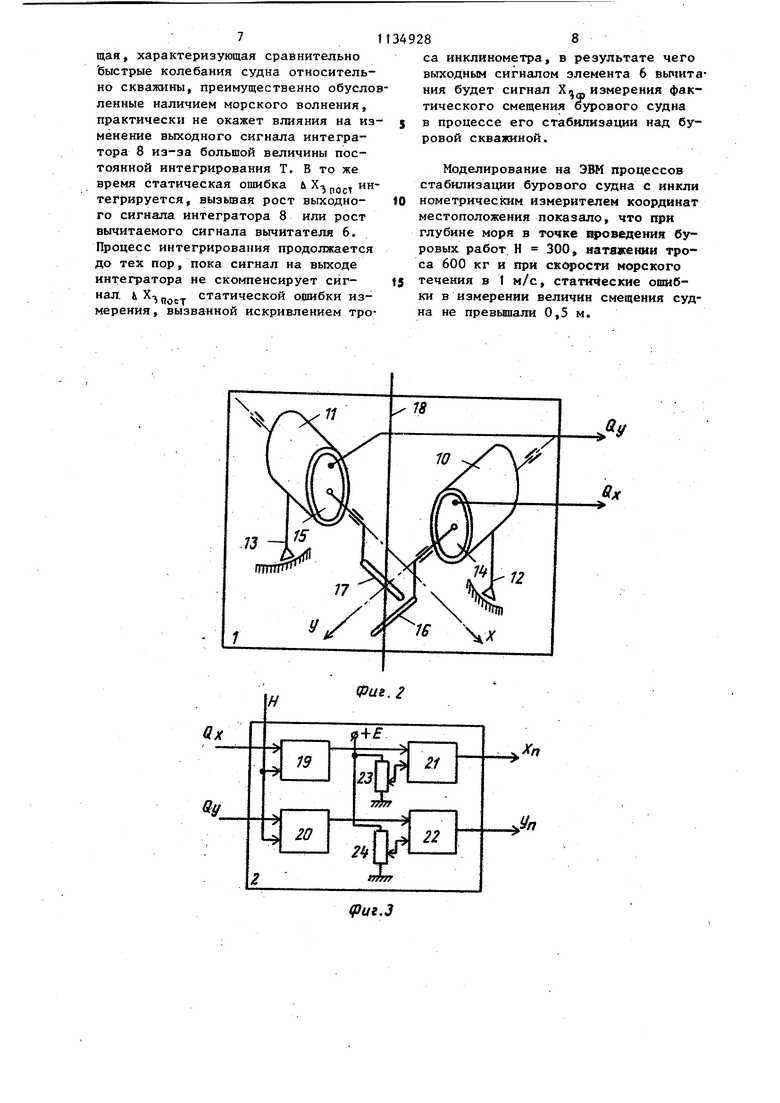
На фиг. 3 изображена блок-схема вычислителя 2 на которой обозначены умножители 19, 20, сумматоры 21, 22, потенциометры 23, 24,
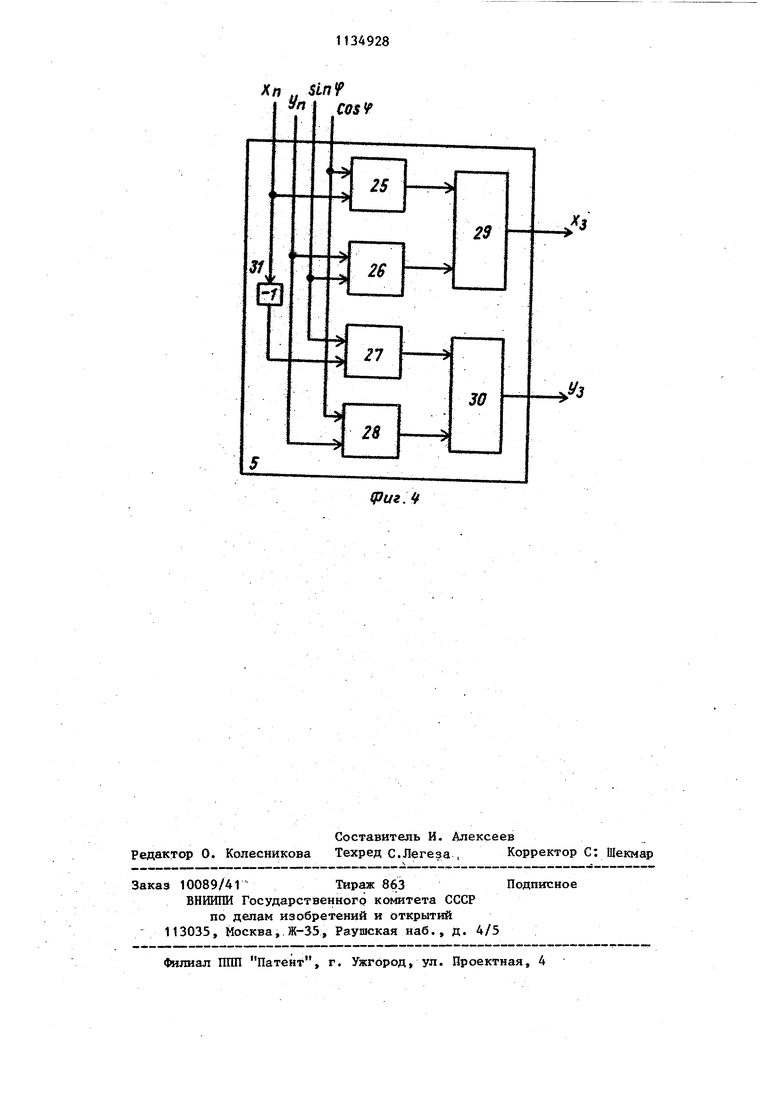
На фиг. 4 изображена блок-схема преобразователя 5 координат, на которой обозначены с первого по четвертый множительные элементы 25-28, первый и второй сумматоры 29 и 30, инвертор 31.
Измеритель работает следующим образом.
Нулевое состояние датчика 1 соответствует вертикальному положению
349284
измерительного троса, прикрепленного нижним концомК якорю-маса1ву, опущенному вблизи буровой скважины, и туго натянутого кабельной 5 лебедкой.
Длина Н стравленного за борт судна троса фиксируется датчиком 3 длины троса. Смещение судна относительно точки бурения приводит к
10 отклонению троса от вертикали на некоторый угол Q и, следовательно, к соответствующему развороту роторов 14, 15 ВТ датчика 1 углов наклона троса (см. фи. 2), Электрические сигналы с ВТ датчика 1, пропорциональные продольной и поперечной составляющим Q у. и Qu угла наклона троса 18, поступают в вычислитель 2, куда также приходит сигнал Н с датчика 3 длины троса. В вычислителе 2 вьфабатывается информация о значениях смещений Х и У;, центра тяжести (ЦТ)- судна относительно буровой скважины в соответст2S ВИИ с формулами (см. фиг. 3)
Q/.H - Хо ;
(1) €}и-Н - V ,
п - «(у -- -о
где Xjj, YQ - координаты отстояния троса инклинометра от ЦТ судна.
Операции перемножения сигналов Qy, QU на Н осуществляются умножителями 19, 20, а вычитание сигналов Х, У в сумматорах 21, 22.
Вьфажения (1) для Х, У справедливы лишь при условии прямолинейности измерительного троса. В случае искривления троса от воздействия на него постоянного, либо медленно меняющегося по скорости подводного течения (V), углы наклона троса, измеряемые датчиком 1, изменяются на величину л QJI ,лQi . При этом вычисления смещений судна по формулам (t) характеризуются статическими (либо медленно меняющимися) ошибками iXj, , uYfj определяемыми приращениями углов лQ ,&Qti .
Поскольку буровое судно в процессе его стабилизации над скважиной совершает сложные колебательные движения под действием порывов ветра, течения и волнения моря, то
выработанная инклинометром информация характеризуется суммой составляющих1 У Я УПФ .+ ЬУп где К да, УПФ -фактические смещения судна относительно скважины. Статические ошибки измерений Л Xq, &УП могут быть скомпенсирова ны введением в канал измерения смещений судна корректирующих сигналов полученных по результатам измерений координат местоположения судна с помощью измерителей другой физической природы например, с использованием показаний гидроакустической системы определения местоположения судна. Когда резервный измеритель смещений судна отсутствует, компенсащ1 я статических погрешностей измерений координат местоположения судна является весьма проблематичной. Компенсация указанных погрешностей измерений осложняется также .следующим обстоятельством. Величины статических ошибок измерения см щений судна относительно скважины из-за искривления троса в случае их измерения в земной системе координат (начало которой совмещено со скважиной, а оси ОХ, ОУ направлены соответственно на Север и Восток) , зависят лишь от скорости и направле ния морского течения и не изменяются при развороте судна на месте по курсу. Однако датчик 1 углов наклона троса расположен на судне и оси его ВТ ориентированы вдоль продольной и поперечной осей судна, в связи с чем вычисляемые по формулам (2) смещения судна относительно точки бурения измеряются в так называемой параллельной системе координат, начало которой также сов мещено с буровой скважиной, а оси ОХ , ОУ(| ориентированы паратшеяьно соответствующим осям судна. В этой системе координат составляющие . йХ(,, йУп статической ошибки измерений зависят от изменения угла курса судна. Разворот судна по кур су изменяет величины составляюи{их Х,, УП смещения судна. Поскольку при стабилизации судна в процессе бурения скважины его курс под действием волнения и ветр вых возмущений время от.времени отклоняется от заданного значения. то погрешности измерения и Хр, йУ(, смещений судна в параллельной системе координат характеризуются наличием двух составляющих - постоянной и переменной: щу (3) ЬУп , л (Уптер из которых первая составляющая характеризует указанную статическую ошибку, а вторая - изменения, обусловленные рысканием судна по курсу. В предлагаемой системе формирования информации об изменении местоположения судна переменные составляющие ошибки , ЬУп.р исключаются посредством пересчета сигналов измерений из параллельной сие темы координат судна в земную систему координат. Указанный пересчет осуществляется в преобразователе 5 по формулам (см. фиг. 6) Xj Xpcos q) У sintf; Y-, -Х„ sintf + Y cosCfy 3 -п где У - координаты смещения центра тяжести судна относительно скважины в земной системе координат;С угол курса судна, измеряемый датчиком курса (гидрокомпасом). Операция перемножения сигналов Xf, 5 УП на cos ( осуществляется множительными элементами 25, 28 и на sin (f - элементами 26, 27, а cyMivCiрование слагаемых в сумматорах 29, 30. При этом статические ошибки ffnoct обусловленные искривлением троса морским течением, преобразуются в аналогичные ошибки посг Jirocf) а переменные составляюпще ЛХ , исключаются по указанной причине. Постоянные значения оншбок измерения и , ь УЗ пос автоматически компенсируются с использованием двух компенсационных схем, кажая из которых содержит вычитатель 6 (7), охваченный интегратором 8 (9) с большой постоянной интегрирования Т (Т % 150-200 с). Например,, при наличии на входе вычитателя 6 сигнала X ,, X, & Хо, . его переменная составляю7щая, характеризующая сравнительно быстрые колебания судна относительно скважины, преимущественно обусло ленные наличием морского волнения, практически не окажет влияния на из менение выходного сигнала интегратора 8 из-за большой величины постоянной интегрирования Т. В то же время статическая ошибка & Х ин тегрируется, вызьшая рост выходного сигнала интегратора 8 или рост вычитаемого сигнала вычитателя 6. Процесс интегрирования продолжается до тех пор, пока сигнал на выходе интегратора не скомпенсирует сигнал, ь Х . статической ошибки измерения, вызванной искривлением тро 88 са инклинометра, в результате чего выходным сигналом элемента 6 вьпштания будет сигнал Х, измерения фактического смещения бурового судна в процессе его стабилизации над буровой скважиной. Моделирование на ЭВМ процессов стабилизации бурового судна с инкли нометрическим измерителем координат местоположения показало, что при глубине моря в точке щроведения буровых работ. Н 300, натяжении троса 600 кг и при сксфости морского течения в 1 м/с, статические ошибки в измерении величин смещения судна не превьнпали 0,5 м.
//
fpui.2
(Риг, Ч
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для обеспечения формирования информации об изменении местоположения бурового судна | 1975 |
|
SU616615A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Dynamic positioning by Art Wittbeek, - Technical Writer, Honeywell Offshore operations, USA, MER, MAY, 1981 (прототип). | |||
