Предлагаемое изобретение относится к измерительной технике, конкретно - к области измерения малых угловых перемещений гиростабилизированной платформы (ГСП), и может найти широкое применение в системах определения уходов гироприборов, автономного азимутального ориентирования ГСП.
В настоящее время известен способ, при котором измерение малых углов производится путем обработки выходной информации акселерометров, чувствительные элементы которых (ЧЭ) установлены в ГСП (А.Липтон "Выставка инерциальных систем на подвижном основании" Москва, ″Наука″, 1971 г., стр.146-147). Недостатком этого способа является то, что при измерении не исключается погрешность от дрейфа нуля акселерометров.
Ближайшим аналогом предлагаемого изобретения является "Способ измерения малых угловых скоростей гиростабилизированной платформы" а.с. 1840665 от 16.06.76.
Этот способ предлагает измерение малых угловых скоростей ГСП при двух положениях оси чувствительности: ось чувствительности акселерометра устанавливают в плоскости горизонта, а разворот оси чувствительности акселерометра на 180° осуществляют вокруг линии действия вектора поля тяготения.
Недостатком данного способа является погрешность, обусловленная тем, что при изменении ориентации чувствительного элемента зависимость вязкости жидкости от "скорости сдвига" приводит к затягиванию процесса отслеживания маятником изменения положения корпуса чувствительного элемента. Это может привести к значительным погрешностям определения реальных значений угловых скоростей ГСП.
Целью предлагаемого способа является повышение точности измерения малых угловых скоростей ГСП. Это достигается тем, что в известном способе измерения малых угловых скоростей путем обработки сигналов акселерометров при двух положениях измерительной оси, при изменении ориентации чувствительного элемента в датчик момента подают переменный ток, который автоматически выключают в момент установления на выходе датчика угла нулевого сигнала.
Предлагаемый способ предусматривает проведение следующих операций:
1) исходя из типа жидкости и угловых скоростей ГСП, определяют параметры переменного сигнала, необходимые для обеспечения выбранного режима колебаний подвижной системы;
2) при начале изменения ориентации подключают к датчику момента чувствительного элемента источник переменного тока с выбранными параметрами;
3) определяют момент достижения сигнала на выходе датчика угла нулевого уровня и автоматически отключают источник переменного тока от датчика момента;
4) при повторном изменении ориентации чувствительного элемента повторяются операции пп. (2) и (3).
На чертеже приведен пример возможной схемной реализации предлагаемого способа, где
1 - чувствительный элемент акселерометра с датчиками угла 2 и момента 3;
3 - формирователь сигнала обратной связи;
5 - источник переменного тока;
6 - коммутирующее устройство;
7 - компаратор.
К выходу датчика угла 2 подключены входы формирователя сигнала обратной связи 4 и компаратора 7. К датчику момента подключены выходы формирователя 4 и коммутирующего устройства 6, к одному входу которого подсоединен источник переменного тока 5, а ко второму входу выход компаратора 7.
При изменении ориентации чувствительного элемента напряжения на выходе датчика угла 2, отличного от нуля, приводит к срабатыванию компаратора 7, который дает команду коммутирующему устройству 6 на подключение к датчику момента 3 источника переменного тока 5.
Сущность изобретения состоит в том, что при подаче в датчик момента переменного тока подвижная система чувствительного элемента колеблется с частотой и амплитудой, обусловленной параметрами подаваемого переменного сигнала.
Эти колебания приводят к уменьшению вязкости жидкости, заполняющей чувствительный элемент, и необходимому увеличению скорости изменения положения маятника (см., например, Лодж А.С. "Эластичные жидкости". изд. "Наука", 1969 г.; Рейнер М. "Деформация и течение". ГНТИ нефтяной и горно-топливной литературы, 1963 г.). Показателем завершения процесса является ноль сигнала на выходе датчика угла. Для исключения влияния переменного тока на точность калибровки акселерометра, при установлении на выходе датчика угла нулевого сигнала переменный ток необходимо отключать.
Предлагаемый способ позволяет в 1,5 раза увеличить точность измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 1976 |
|
SU1840665A1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1979 |
|
SU1839834A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| Способ автономной навигации для объекта космического назначения | 2018 |
|
RU2727784C2 |
| СПОСОБ КОНТРОЛЯ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2013 |
|
RU2541152C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЕКТОРА УСКОРЕНИЯ | 1995 |
|
RU2079143C1 |
| АЗИМУТАЛЬНАЯ ОРИЕНТАЦИЯ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПРЕЦЕССИИ ГИРОБЛОКА | 2006 |
|
RU2324897C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОЙ ВЫСТАВКИ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 1993 |
|
RU2062990C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
Изобретение относится к измерительной технике, конкретно - к области измерения малых угловых перемещений гиростабилизированной платформы (ГСП), и может быть использовано в системах определения уходов гироприборов, автономного азимутального ориентирования ГСП. Сущность: способ осуществляется путем обработки сигналов акселерометров при двух положениях измерительной оси. При изменении ориентации чувствительного элемента в датчик момента подают переменный ток, который автоматически выключают в момент установления на выходе датчика угла нулевого сигнала. Технический результат: повышение точности измерения. 1 ил.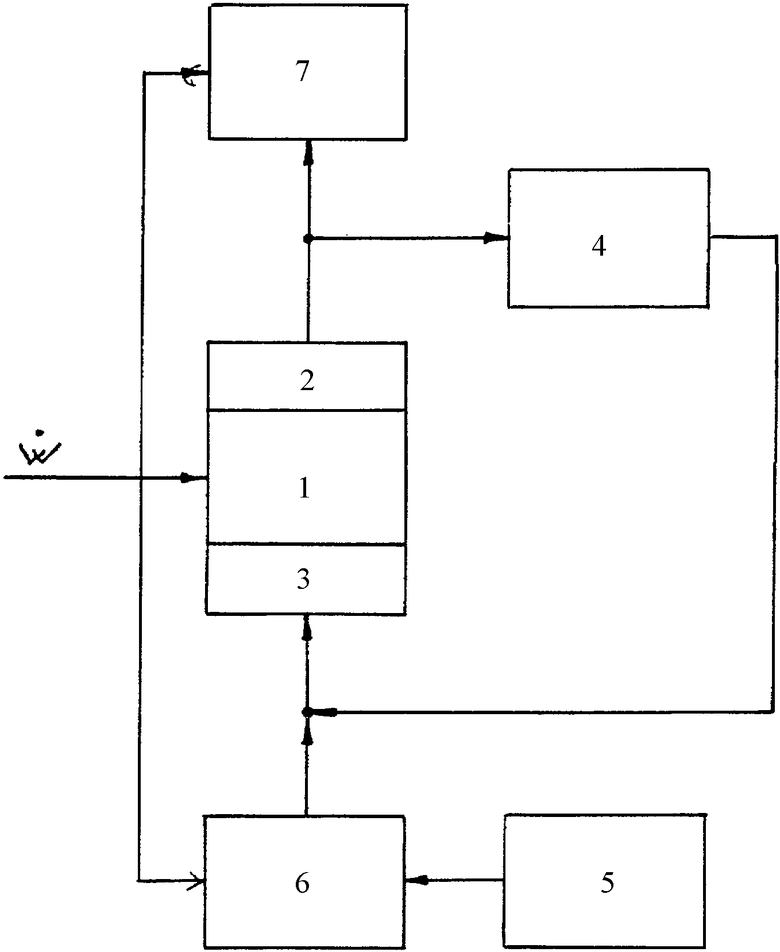
Способ измерения малых угловых скоростей гиростабилизированной платформы по а.с. №1840665, отличающийся тем, что, с целью повышения точности измерения поплавковым акселерометром, при развороте оси чувствительности акселерометра в его датчик момента подают переменный ток, который отключают при нулевом сигнале датчика угла акселерометра.
| Авт.свид | |||
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 1976 |
|
SU1840665A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| А.Липтон "Выставка инерциальных систем на подвижном основании, изд | |||
| "Наука", М., 1971 г | |||
| Приспособление, увеличивающее число оборотов движущихся колес паровоза | 1919 |
|
SU146A1 |

