Изобретение относится к области измерения малых угловых перемещений гиростабилизированной платформы (ГСП) и может найти широкое применение в системах определения уходов гироприборов, автономного азимутального ориентирования ГСП.
В настоящее время известен и широко применяется способ измерения малых угловых перемещений гиростабилизированной платформы путем определенной ориентации оси чувствительности акселерометра в поле тяготения и фиксирования выходной информации, например система азимутального ориентирования, основанная на измерении уходов.
Назаров Б.И., Хлебников Г.А. Гиростабилизаторы. Воениздат. - Москва, 1975 г., стр.189.
Однако указанные аналоги не позволяют производить измерения малых угловых скоростей из-за погрешности дрейфа нуля характеристики преобразования акселерометров.
Ближайшим аналогом предлагаемого изобретения является способ, изложенный в книге "Выставка инерциальных систем на подвижном основании" А.Липтон, Москва, издательство "Наука", 1971 г., стр.146-147, при котором измерение малых углов производится путем обработки выходной информации акселерометров, причем для исключения погрешностей нуля акселерометра измерение производится в трех положениях:
1) ось чувствительности совпадает с вектором поля тяготения;
2) ось чувствительности противоположна вектору поля тяготения;
3) при измерении малых углов ось чувствительности перпендикулярна полю тяготения.
Недостатком известного способа является то, что измерения нуля акселерометра производятся при вертикальном положении оси чувствительности акселерометра, в то время как измерение углов происходит при горизонтальном положении оси чувствительности. Это приводит к ошибке определения угла, так как нуль акселерометра при горизонтальном и вертикальном положениях акселерометра неодинаков из-за составляющих нуля, связанных с разной жесткостью подвеса в вертикальном и горизонтальном положениях, невзвешенности и дифферента подвижной системы, уводящих моментов и т.д. Кроме того, определение нуля характеристики преобразования акселерометра и измерение малых угловых скоростей происходит в известном способе в разные моменты времени, что приводит к дополнительным погрешностям, связанным с дрейфом нуля акселерометра. При этом следует учитывать, что при измерении малых угловых скоростей основную погрешность вносит дрейф нуля акселерометра в момент измерения, который не может быть определен в известном способе.
Целью настоящего изобретения является исключение погрешности дрейфа нуля характеристики преобразования акселерометра.
Указанная цель достигается тем, что в известном способе измерения малых угловых скоростей гиростабилизированной платформы путем фиксирования и обработки выходной информации ориентируют ось чувствительности акселерометров перпендикулярно полю тяготения, фиксируют выходную информацию акселерометров в процессе измерения угловой скорости вращения гиростабилизированной платформы, разворачивают акселерометры вокруг вектора поля тяготения на 180°, снова фиксируют выходную информацию акселерометров и рассчитывают угловую скорость гиростабилизированной платформы по результатам двух измерений.
Предлагаемый способ может быть реализован устройством, показанным на чертеже, который содержит:
1) гиростабилизированную платформу;
2) акселерометры;
3) устройство для разворота акселерометра;
4) вычислительное устройство.
На гиростабилизированной платформе 1 устанавливаются акселерометры 2 и устройства для разворота акселерометров 3. Выход акселерометра подключен к вычислительному устройству 4.
В предлагаемом способе определение малых угловых скоростей осуществляется в следующей последовательности:
1. Ориентируют ось чувствительности акселерометров 2 с помощью гиростабилизированной платформы 1 перпендикулярно полю тяготения.
2. Фиксируют выходную информацию акселерометра 2 с помощью вычислительного устройства 4 в процессе измерения малых угловых скоростей гиростабилизированной платформы 1. При этом
где ΔXизм - приращение выходной информации, определяемое угловой скоростью вращения ГСП (ω1);
ΔX0 - приращение выходной информации, определяемое дрейфом нуля характеристики преобразования акселерометра;
к - масштабный коэффициент акселерометра.
3. Разворачивают акселерометры 2 с помощью устройства для разворотов акселерометра 3 вокруг вектора поля тяготения на 180°.
4. Фиксируют выходную информацию акселерометра 2 с помощью вычислительного устройства 4, в процессе измерения той же угловой скорости. При этом
5. Рассчитывают угловую скорость ГСП по результатам двух измерений с помощью вычислительного устройства 4.
Из формулы видно, что погрешность, определяемая дрейфом нуля характеристики преобразования акселерометра, отсутствует.
Использование предлагаемого изобретения позволяет получить следующие преимущества:
1) повышается точность измерения малых угловых скоростей гиростабилизированной платформы;
2) упрощаются требования к точности акселерометра, в частности, к его аддаптивной составляющей погрешности;
3) отпадает необходимость точной выставки акселерометров.
Изобретение относится к области измерения малых угловых перемещений гиростабилизированной платформы. Способ измерения малых угловых скоростей гиростабилизированной платформы путем обработки сигналов акселерометров при двух положениях оси чувствительности, причем ось чувствительности акселерометра устанавливают в плоскости горизонта, а разворот оси чувствительности акселерометра на 180° осуществляют вокруг линии действия вектора поля тяготения. Технический результат - повышение точности. 1 ил.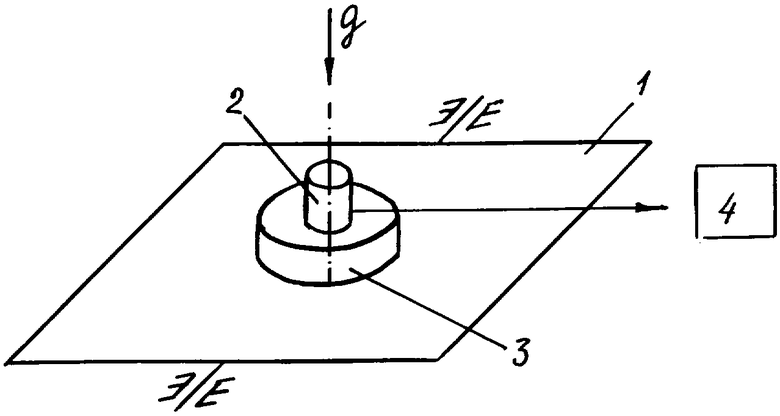
Способ измерения малых угловых скоростей гиростабилизированной платформы путем обработки сигналов акселерометров при двух положениях оси чувствительности, отличающийся тем, что, с целью повышения точности, ось чувствительности акселерометра устанавливают в плоскости горизонта, а разворот оси чувствительности акселерометра на 180° осуществляют вокруг линии действия вектора поля тяготения.

