Предлагаемое изобретение относится к измерительной технике и может быть использовано при разработке акселерометров.
Наиболее близким аналогом предлагаемого является акселерометр, реализующий «Способ измерения малых угловых скоростей гиростабилизированной платформы» по заявке №2235075 от 10.04.78 г. с решением о выдаче а.с. № р-18256 от 23.10.78 г., содержащий маятниковый чувствительный элемент с жидкостным заполнением, между датчиком угла и момента которого включен формирователь обратной связи, компаратор, коммутатор и источник напряжения переменного тока. Недостатком этого технического решения является то, что, уменьшая погрешность калибровки, обусловленную вязкостью заполняющей чувствительный элемент жидкости, наличие переменной составляющей большой амплитуды на момент достижения напряжения датчика угла нулевого значения приводит к погрешности калибровки акселерометра из-за повышенной колебательности подвижной системы чувствительного элемента после выключения переменного тока, подаваемого в датчик момента.
Целью предлагаемого изобретения является повышение точности калибровки акселерометра за счет уменьшения погрешности, вызываемой колебательностью подвижной системы чувствительного элемента. Поставленная цель достигается тем, что маятниковый компенсационный акселерометр, содержащий чувствительный элемент с жидкостным заполнением, между датчиками угла и момента которого включен формирователь сигнала обратной связи, компаратор, коммутатор и источник переменного напряжения, снабжен четырехполюсником с изменяющимся во времени по экспоненте коэффициентом передачи, именуемым далее в тексте формирователем экспоненты, вход которого подключен к источнику переменного напряжения, а выход - к одному из входов коммутатора.
На фиг.1 приведена структурная схема предлагаемого акселерометра.
На фиг.2 приведена характеристика изменения выходного напряжения формирователя экспоненты. Акселерометр содержит:
1 - чувствительный элемент, включающий:
2 - маятник,
3 - подвижную систему,
4 - датчик угла,
5 - датчик момента;
6 - формирователь сигнала обратной связи;
7 - компаратор;
8 - коммутатор;
9 - источник переменного напряжения;
10 - формирователь экспоненты.
Выход датчика угла 4 соединен с входом формирователя сигнала обратной связи 6 и входом компаратора 7, выход которого подключен к входу коммутатора 8. Выход формирователя сигнала обратной связи 6 соединен с датчиком момента 5, к которому подключен выход коммутатора 8. Источник переменного напряжения 9 соединен с входом формирователя экспоненты 10, выход которого подключен ко второму входу коммутатора 8.
Акселерометр работает следующим образом. При изменении ориентации чувствительного элемента 1 от сигнала рассогласования с выхода датчика угла 4 срабатывает компаратор 7 и подключает к датчику момента 5 через коммутатор 8 и формирователь экспоненты 10 источник переменного напряжения 9.
Частота и амплитуда выходного напряжения источника 9 выбираются, исходя из обеспечения колебаний подвижной системы 3, достаточных для требуемого уменьшения вязкости жидкости, заполняющей чувствительный элемент 1. Вследствие этого, переходный процесс по углу перемещения маятника 2 заканчивается достаточно быстро и погрешность калибровки значительно снижается. Однако для исключения влияния мгновенной нестабильности из-за вводимых повышенных колебаний подвижной системы 4 на погрешность калибровки необходимо отключать источник 9 от датчика момента 5 в момент завершения переходного процесса. Показателем завершения переходного процесса является нулевой сигнал на выходе датчика угла 4. При этом компаратор 7 отключает через коммутатор 8 источник переменного напряжения 9 от датчика момента 5.
Однако то, что для эффективного снижения вязкости жидкости амплитуда колебаний подвижной системы 3 реализуется весьма значительной, а также инерционность чувствительного элемента 1 может являться причиной достаточного длительного колебательного переходного процесса по углу колебаний маятника 2 после отключения источника 9, что приводит к дополнительной погрешности калибровки. Для исключения этого введен формирователь экспоненты 10, обеспечивающий экспоненциальное снижение амплитуды переменного напряжения, как это показано на фиг.2.
Соответствующий выбор постоянной времени формирователя 10 позволяет в начальный период изменения ориентации подавать максимальные напряжения в датчик момента 5, а снижение амплитуды во времени, практически не снижая эффективности снижения вязкости жидкости, исключает возможность возникновения колебательного переходного процесса по углу колебания маятника 2 после отключения источника 9.
Экспериментальная проверка предлагаемого акселерометра показала, что погрешность калибровки снижается более чем в 2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1983 |
|
SU1840734A1 |
| СПОСОБ ИЗМЕРЕНИЯ МАЛЫХ УГЛОВЫХ СКОРОСТЕЙ ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ | 1978 |
|
SU1839842A2 |
| Способ обеспечения виброустойчивости маятникового акселерометра линейных ускорений с цифровой обратной связью и виброустойчивый маятниковый акселерометр | 2015 |
|
RU2615221C2 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1979 |
|
SU1839840A1 |
| СПОСОБ ИЗМЕРЕНИЯ УСКОРЕНИЯ КОМПЕНСАЦИОННЫМ АКСЕЛЕРОМЕТРОМ | 1979 |
|
SU1839854A1 |
| СПОСОБ ПОВЫШЕНИЯ ВИБРОУСТОЙЧИВОСТИ МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА | 1969 |
|
SU1839872A1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| Акселерометр | 1980 |
|
SU901914A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1997 |
|
RU2121693C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОГРЕШНОСТИ ПРОПОРЦИОНАЛЬНОСТИ МАЯТНИКОВОГО ДИСКРЕТНОГО АКСЕЛЕРОМЕТРА | 1984 |
|
SU1839865A1 |
Изобретение относится к измерительной технике и может быть использовано при разработке акселерометров. Сущность: акселерометр содержит чувствительный элемент с жидкостным наполнением и источник напряжения переменного тока. Между датчиком угла и датчиком момента чувствительного элемента включен формирователь сигнала обратной связи. Компаратор соединен с выходом датчика угла. Управляющий вход коммутатора соединен с выходом компаратора, а выход - с датчиком момента. Кроме того, он снабжен четырехполюсником, вход которого подключен к источнику напряжения переменного тока, а выход - к сигнальному входу коммутатора. Четырехполюсник выполнен с изменяющимся во времени по экспоненте коэффициентом передачи. Технический результат: повышение точности калибровки. 2 ил.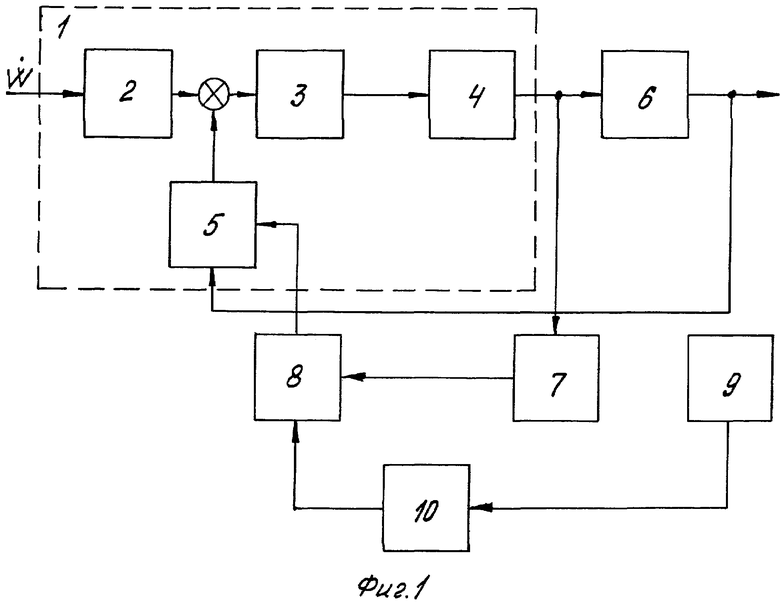
Маятниковый компенсационный акселерометр, содержащий чувствительный элемент с жидкостным заполнением, между датчиками угла и момента которого включен формирователь сигнала обратной связи, компаратор, соединенный с выходом датчика угла, коммутатор, управляющий вход которого соединен с выходом компаратора, а выход - с датчиком момента, и источник напряжения переменного тока, отличающийся тем, что, с целью повышения точности калибровки, он снабжен четырехполюсником с изменяющимся во времени по экспоненте коэффициентом передачи, вход которого подключен к источнику напряжения переменного тока, а выход - к сигнальному входу коммутатора.

