Изобретение относится к области точного приборостроения и может быть использовано в процессе производства маятниковых компенсационных акселерометров.
Известен способ регулировки акселерометра путем изменения положения магнитной системы относительно обмотки датчика момента (см.например, статью Сотниковой Г.И. в журн. "Изв. ВУЗов", серия "Приборостроение", 1969 г., №10).
Недостатком известного способа является то, что он не позволяет отрегулировать мультипликативную погрешность, обусловленную смещением обмотки относительно статора при воздействии ускорения.
Наиболее близким по технической сущности к предлагаемому изобретению является способ регулировки маятникового компенсационного акселерометра путем перемещения статора датчика момента относительно корпуса акселерометра.
По этому способу определяют мультипликативную погрешность как непропорциональность изменения коэффициента преобразования при отклонении подвижной части на угол ϕ, соответствующий максимально действующему ускорению и минимизируют ее путем поворота статора датчика момента относительно корпуса на угол α

где δ - величина мультипликативной погрешности;
S - крутизна изменения мультипликативной погрешности по углу поворота статора, определяемая для каждого типа акселерометра экспериментальным путем.
Известный способ имеет тот недостаток, что получение мультипликативной погрешности в пределах требуемых норм из-за разброса магнитных свойств отдельных магнитов и наличия допусков на изготовление деталей акселерометра, возможно при выполнении нескольких циклов операций по определению мультипликативной погрешности и перемещению статора датчика момента. Это усложняет процесс регулировки и увеличивает ее время.
Целью настоящего изобретения является упрощение процесса минимизации мультипликативной погрешности.
Указанная цель достигается тем, что в известном способе регулировки маятникового компенсационного акселерометра путем перемещения статора датчика момента относительно корпуса акселерометра, операцию перемещения осуществляют до получения минимальной величины коэффициента преобразования при одновременном ее контроле.
Предлагаемый способ включает в себя следующие операции:
1. Устанавливают акселерометр в положение оси чувствительности вдоль вектора земного тяготения.
2. Перемещают статор, одновременно контролируя значения коэффициента преобразования, до получения минимальной величины коэффициента преобразования.
На фиг.1 изображена схема маятникового компенсационного акселерометра.
Акселерометр состоит из корпуса 1, датчика момента, датчика угла и усилителя обратной связи 2.
Внутри корпуса 1 закреплены статор датчика угла 3, опоры 4 и статор датчика момента, содержащий цилиндрический магнитопровод 5 и диаметрально намагниченный магнит 6.
Маятник 7, ротор (гальванометрическая рамка) датчика момента 8 и ротор датчика угла 9 соединены между собой и образуют подвижную часть акселерометра, которая установлена в опорах 4.
При действии ускорения на маятник 7 происходит поворот подвижной системы, при этом с датчика угла через усилитель 2 подается сигнал в гальванометрическую рамку 8. В результате взаимодействия тока рамка 8 с полем постоянного магнита 6 возникает момент, стремящийся возвратить подвижную систему в исходное положение. Выходной сигнал с усилителя 2 пропорционален действующему ускорению.
Минимизация мультипликативной погрешности маятникового компенсационного акселерометра заключается в установке статора датчика момента относительно корпуса акселерометра в такое положение, при котором коэффициент преобразования изменяется на минимальную величину при отклонении подвижной части на угол ϕ, соответствующий максимальному действующему ускорению.
Условие минимального изменения коэффициента преобразования при отклонении подвижной части на угол ϕ возможно при условии минимального изменения индукции по углу. Индукция в зазоре магнитной системы с цилиндрическим магнитом изменяется по закону косинуса. Поэтому минимальное изменение индукции по углу имеет место в районе полюсов магнита - максимума величины индукций. Нахождение рамки на участке максимума индукции соответствует минимальному коэффициенту преобразования. Таким образом, минимум мультипликативной погрешности соответствует минимуму величины коэффициента преобразования.
По предлагаемому способу операцию перемещения осуществляют до получения минимальной величины коэффициента преобразования. Одновременный с операцией перемещения контроль коэффициента преобразования позволяет произвести минимизацию за один цикл операции перемещения статора.
За базовый объект может быть принят способ регулировки маятникового компенсационного акселерометра путем перемещения статора датчика момента относительно корпуса акселерометра.
На практике минимизация мультипликативной погрешности по этому способу возможна при выполнении 3-5 циклов операций по определению погрешности и перемещению статора датчика момента.
Применение предлагаемого способа позволяет, не производя операции по определению величины мультипликативной погрешности, обеспечить надежную ее минимизацию за один цикл перемещения статора.
Таким образом, использование предлагаемого способа регулировки маятникового компенсационного акселерометра по сравнению с известными способами и базовым объектом значительно упрощает процесс регулировки и снижает трудоемкость в 3-5 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1978 |
|
SU1839858A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839836A1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1982 |
|
SU1839891A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| СПОСОБ РЕГУЛИРОВКИ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1979 |
|
SU1839894A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА, ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО МАЯТНИКОВОГО АКСЕЛЕРОМЕТРА И УСТРОЙСТВА ЕГО РЕАЛИЗУЮЩИЕ | 2005 |
|
RU2281874C1 |
| СПУТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2016 |
|
RU2627014C1 |
Изобретение относится к области точного приборостроения и может быть использовано в процессе производства маятниковых компенсационных акселерометров. Сущность: акселерометр устанавливают в положение оси чувствительности вдоль вектора земного тяготения. Перемещают статор, одновременно контролируя значения коэффициента преобразования, до получения минимальной величины коэффициента преобразования. Технический результат: упрощение процесса минимизации мультипликативной погрешности. 1 ил.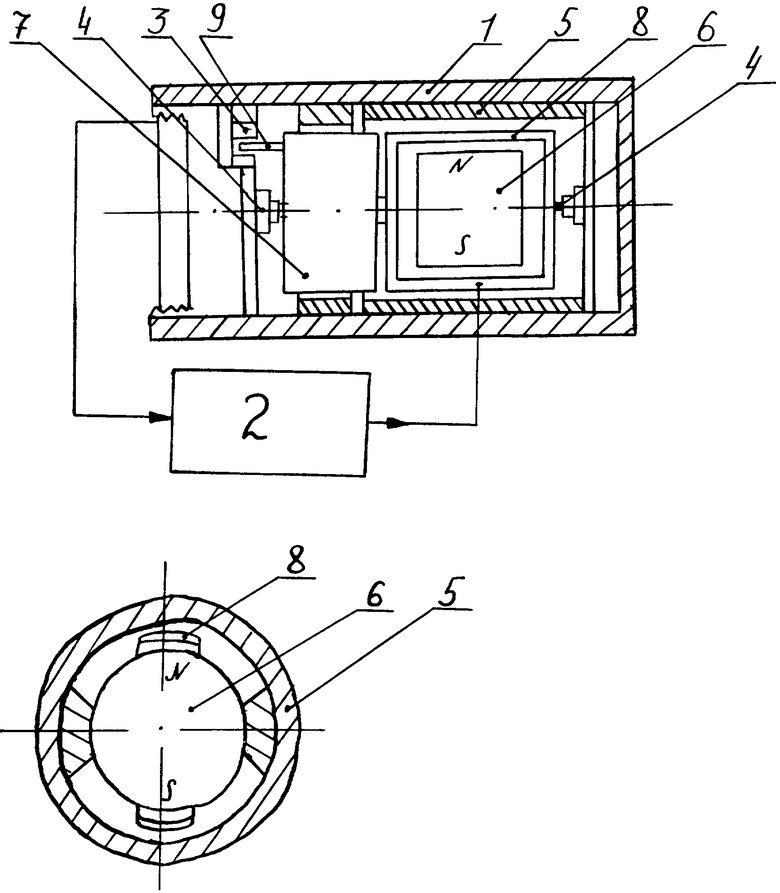
Способ регулировки маятникового компенсационного акселерометра путем перемещения статора датчика момента относительно корпуса акселерометра, отличающийся тем, что, с целью упрощения процесса минимизации мультипликативной погрешности, перемещение осуществляют до получения минимальной величины коэффициента преобразования при одновременном ее контроле.
| Журнал "Известия ВУЗов" серия "Приборостроение" | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

