Изобретение относится к электротехнике, а именно к способам форсированного частотного разгона асинхронных двигателей.
Известна система форсированного частотного разгона, в которой оптимальная величина абсолютного скольжения поддерживается за счет выбора программного закона наростания частоты питания. Ток потребления гиродвигателя на начальном участке стабилизируется на максимально возможном для данного типа гиродвигателя уровне контуром стабилизации тока. В связи с тем, что двигатель, для которого была разработана эта система, имел ограничение по напряжению, то в схему были введены блок контроля напряжения (БКН) на выходе преобразователя и контур стабилизации напряжения.
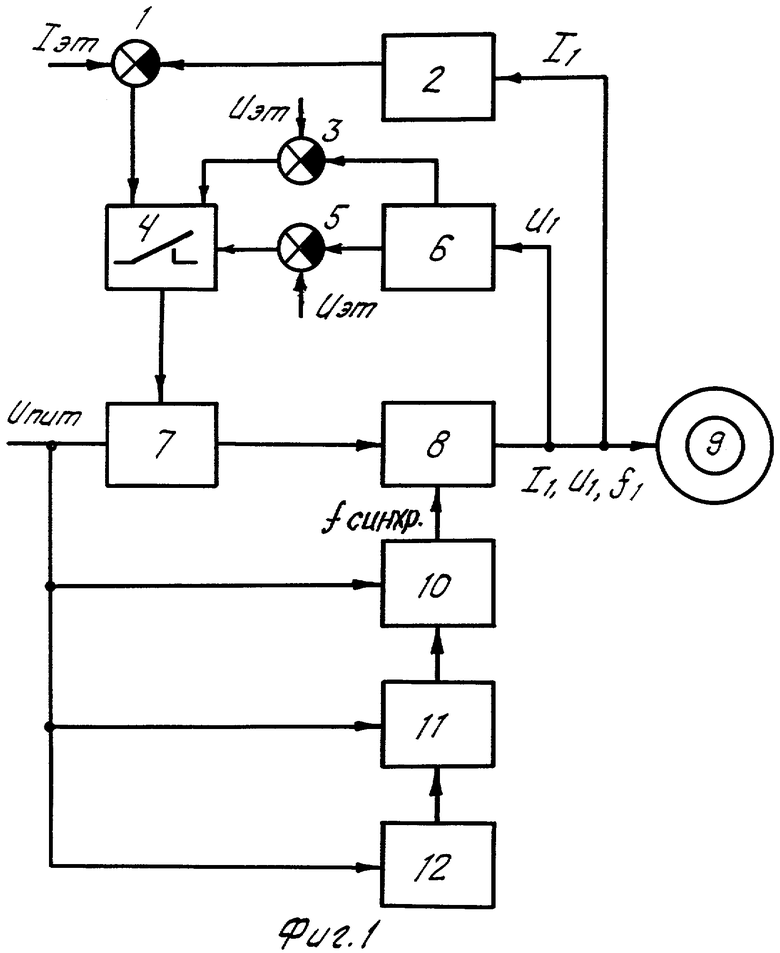
Данная блок-схема системы представлена на фиг.1.
На фиг.1 обозначено:
1 - измерительный орган канала стабилизации тока;
2 - цепи обратной связи по току;
3 - измерительный орган канала стабилизации напряжения;
4 - переключающее устройство;
5 - измерительный орган БКН;
6 - цепи обратной связи по напряжению;
7 - регулятор напряжения;
8 - статический преобразователь;
9 - двигатель;
10 - выходной управляемый генератор;
11 - цифроаналоговый преобразователь;
12 - тактовый генератор;
Iэт, Uэт - эталонные значения тока и напряжения;
Uпит - напряжение питания системы;
U1, I1, f1 - напряжение, ток и частота питания гиродвигателя;
fсинхр. - частота синхронизации преобразователя.
Данная система работает следующим образом. При подаче напряжения питания начинает работать программный задающий генератор (блоки 10, 11, 12), и на вход преобразователя (8) подается синхронизирующее напряжение. Двигатель начинает разгоняться. При этом его ток потребления стабилизируется на заданном уровне контуром стабилизации тока (блоки 1, 2). По мере разгона двигателя его эквивалентное сопротивление растет, и в связи с этим возрастает и величина напряжения на выходе преобразователя. При достижении выходным напряжением преобразователя предельно-допустимого значения срабатывает БКН яблоки 4, 5, 6) и переключает вход регулятора напряжения с канала стабилизации тока на канал стабилизации напряжения (блоки 6, 3). Начиная с этого момента и до конца разгона на выходе преобразователя стабилизируется напряжение.
Указанная система наряду с достоинствами, главными из которых являются ее относительная простота и высокая надежность, обладает и рядом существенных недостатков, свойственных программным системам регулирования: невысокой точностью получения регулируемого параметра (частоты абсолютного скольжения), большим разбросом конечных скоростей вращения двигателей, малой экономичностью связанной о необходимостью обеспечения определенного запаса по частоте абсолютного скольжения при работе в различных условиях окружающей среды и т.п. Известна другая система форсированного разгона, в которой оптимальная величина абсолютного скольжения поддерживается автоматически, за счет изменения времени пуска двигателя.
В системе двойная частота абсолютного скольжения, модулирующая ток потребления гиродвигателя, выделяется фильтром, усиливается и сравнивается с эталонным значением.
Сигнал отклонения двойной частоты абсолютного скольжения от заданного значения, управляет темпом нарастания частоты питания гиродвигателя таким образом, чтобы величина абсолютного скольжения поддерживалась постоянной в пределах допуска.
Данная система форсированного разгона позволяет получать с достаточно высокой степенью точности заданное значение частоты вращения гиродвигателя в конце разгона. Однако и эта система обладает недостатками:
1. Сигнал управления, модулирующий ток потребления, по абсолютному значению равен двойному значению частоты тока ротора, в связи с чем выделение этого сигнала возможно только при сравнительно высоком значении частоты питания (≥260 Гц). Поэтому эта система выполняется комбинированной: нарастание частоты питания от начального значения (85 Гц) до заданного значения (260 Гц) осуществляется по программе, а затем до значения 1040 Гц осуществляется управляемый разгон с автоматическим поддержанием абсолютного скольжения, что безусловно усложняет эту систему.
2. В связи с изменением степени насыщения стали гиродвигателя в процессе разгона для получения строго оптимальных условий пуска необходимо изменять в определенных пределах величину абсолютного скольжения, а не поддерживать ее неизменной, как это имеет место в указанной системе.
3. При разгоне с поддержанием абсолютного скольжения гиродвигателя для получения устойчивого запуска в различных условиях окружающей среды и при наличии технологических разбросов параметров гиродвигателей величина абсолютного скольжения выбирается заниженной по сравнению с оптимальным значением его при нормальных условиях пуска. Это обстоятельство увеличивает время пуска гиродвигателя и ухудшает энергетику системы.
4. Так как при изменении температуры окружающей среды активные сопротивления обмоток гиродвигателя изменяются в широких пределах, то время разгона при данном способе пуска изменяется в довольно широких пределах (от 18 до 30 сек). В связи с этим время готовности гироузла берется по максимальному значению времени разгона, что увеличивает время подготовки к пуску изделия в нормальных условиях работы.
Для ликвидации указанных недостатков обеих систем предлагается устройство для форсированного частотного разгона, разработанное на основе способа разгона по максимуму мощности, указанному в заявке №61828.
Сущность предлагаемого устройства форсированного частотного разгона поясняется чертежами, где представлены:
на фиг. 2 - блок-схема предлагаемого устройства;
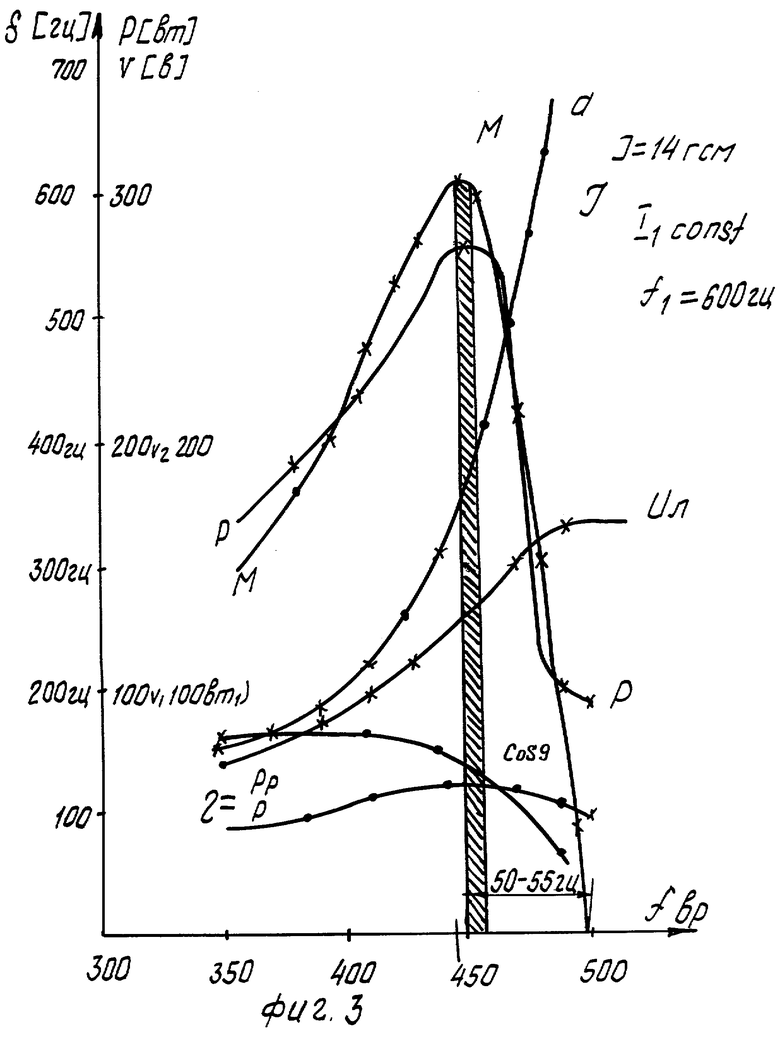
на фиг. 3 - характеристики асинхронного гиродвигателя (например, типа ИАВ-760-11) в зависимости от частоты вращения ротора;
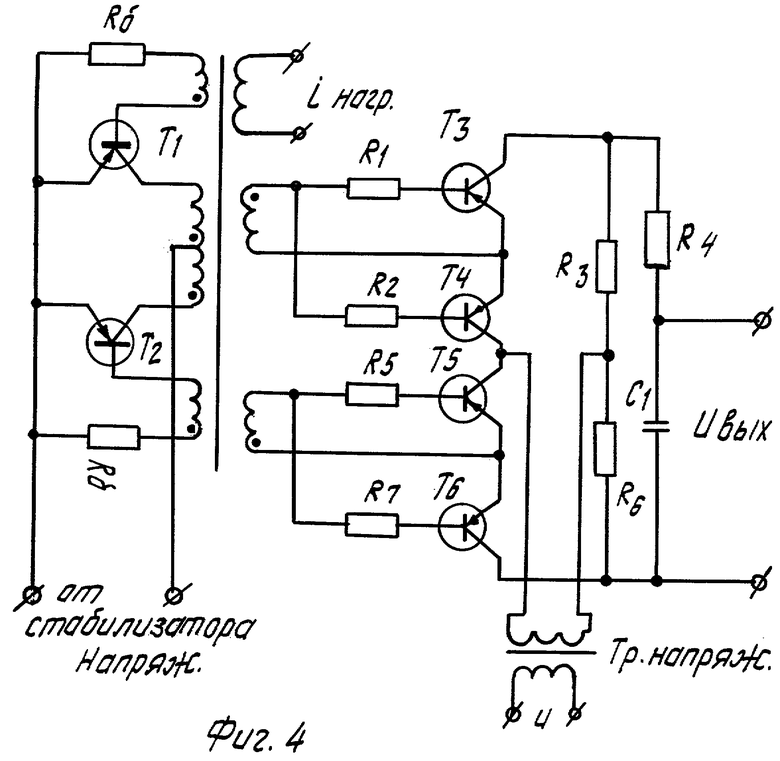
на фиг. 4 - схема датчика активной мощности;
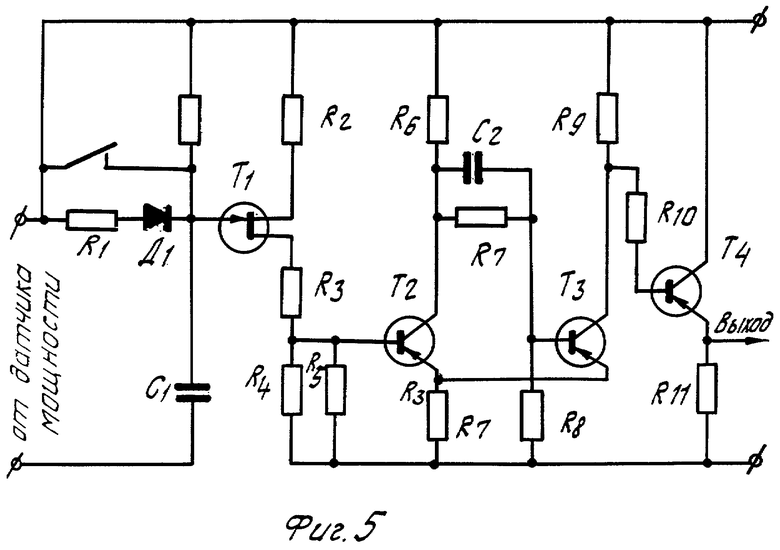
на фиг. 5 - схема фиксации максимума активной мощности;
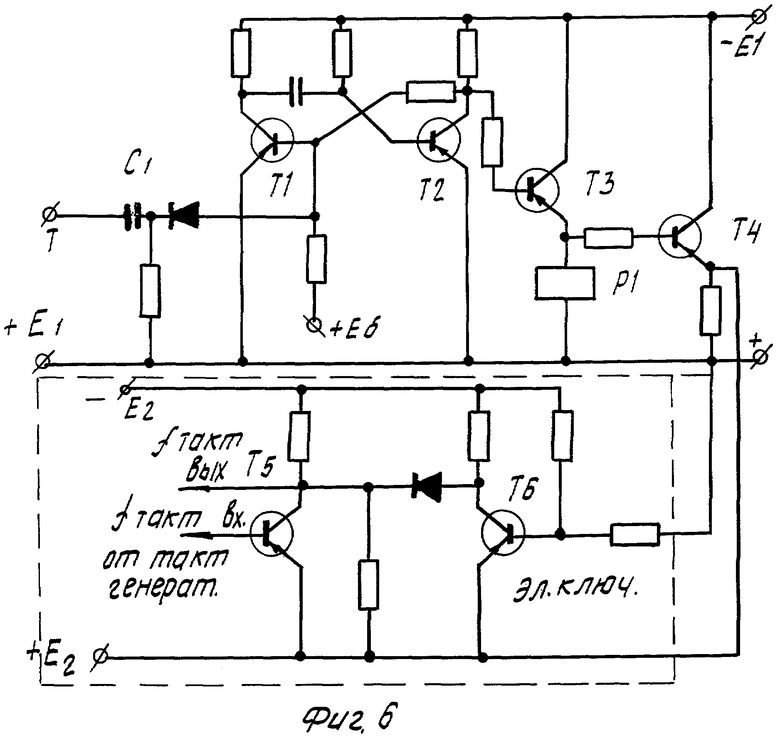
на фиг. 6 - схема управления электронным ключем (T6);
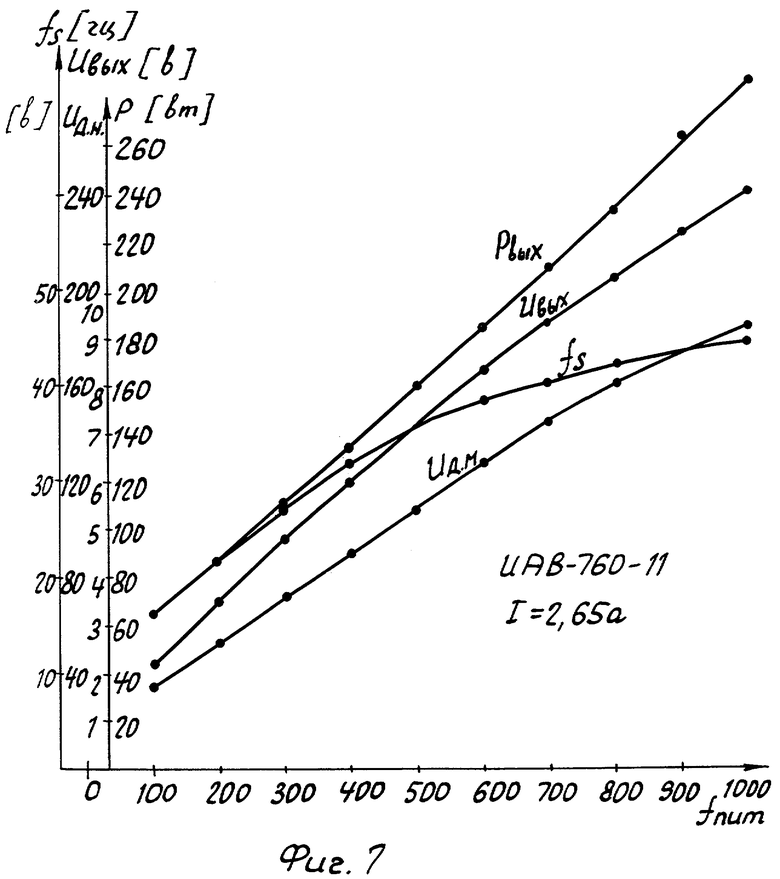
на фиг. 7 - кривые изменения выходных параметров устройства, снятые при разгоне двигателя ИАВ760-11 при токе статора 2,65 А.
На фиг. 2 обозначено:
1 - измерительный орган канала стабилизации тока нагрузки;
2 - цепь обратной связи по току нагрузки;
3 - регулятор напряжения;
4 - статический преобразователь;
5 - гиродвигатель;
6 - схема фиксации и выдержки конечного значения частоты синхронизации (выходной частоты преобразователя);
7 - управляемый выходной генератор;
8 - датчик активной мощности;
9 - цифро-аналоговый преобразователь;
10 - схема фиксации максимума;
11 - электронный ключ;
12 - устройство управления электронным ключом (ждущий мультивибратор);
13 - тактовый генератор;
Uпит. - напряжение питания устройства;
fсинхр. - частота синхронизации преобразователя.
На фиг. 3 приведены рабочие характеристики гиродвигателя, снятые при частоте питания 600 Гц.
На фиг.5 - C1 зарядная емкость, Т1 - усилитель сигнала максимума; Т2-Т3 - пороговое устройство (триггер Шмитта); Т4 - эмиттерный повторитель.
На фиг.6 - Т1-Т2 - ждущий мультивибратор,
T3-T4 - эмиттерные повторители,
Т5 - формирователь сигнала тактового генератора,
T6 - электронный ключ.
На фиг.7 - Рвых - кривая изменения активной мощности, потребляемой гиродвигателем при разгоне с управлением по максимуму активной мощности, снятая при помощи ваттметров;
Uвых - кривая изменения выходного напряжения устройства;
fS - кривая изменения абсолютного скольжения гиродвигателя при разгоне по максимуму активной мощности;
UД.М. - кривая изменения сигнала с выхода датчика активной мощности.
Работа схемы происходит следующим образом. При включении схемы управляемый выходной генератор обеспечивает начальную частоту синхронизации. На выходе статического преобразователя вырабатывается некоторое начальное значение напряжения питания. Контур регулирования тока (блоки 1, 2, 3 и 4 фиг.2) начинает стабилизировать заданное значение тока статора гиродвигателя, и последний начинает разгоняться при указанном значении частоты питания.
Блок 8 (фиг.2) производит непрерывный замер потребляемой двигателем активной мощности из источника (4). Как следует из кривых потребляемой мощности (фиг.3), в определенный момент времени потребляемая двигателем активная мощность и вращающий момент двигателя достигают максимального значения, для данной частоты питания и величины тока статора. Такой же характер изменения имеет сигнал на выходе датчика мощности, фиг.7.
Как только активная мощность и сигнал на выходе пройдет точку максимума, транзистор T1 (фиг.5) срабатывает, и на входе порогового устройства (триггера Шмитта) появляется сигнал, под действием которого на выходе триггера Шмитта в свою очередь появляется выходной сигнал, который усиливается эмиттерным повторителем Т4, фиг.5 и управляет работой ждущего мультивибратора Т1-Т2, фиг.6. Последний запускается на строго определенное время Δt, в течение которого оказывается открытым электронный ключ T6, и частота тактового генератора в течение этого промежутка времени поступает на вход цифроаналогового преобразователя (блок 9, фиг.2). Под воздействием этой частоты цифроаналоговый преобразователь вырабатывает определенное значение тока управления, в результате чего на выходе управляемого выходного генератора (блок 7, фиг.2), а следовательно, и статического преобразователя появляется новое значение частоты. При запуске ждущего мультивибратора запитывается реле P1 (фиг.6) и своими нормально разомкнутыми контактами разряжает конденсатор C1 (фиг.5) до уровня текущего значения напряжения с выхода датчика активной мощности, возвращая тем самым триггер Шмитта в исходное состояние.
Возврат триггера Шмитта в исходное состояние, как и предварительный разряд конденсатора C1 (фиг.5), обеспечивает подготовку для работы схемы с новым значением максимума потребляемой активной мощности, которое будет иметь место при новом значении частоты питания. После срабатывания ждущего мультивибратора, электронный ключ запирается, на выходе преобразователя устанавливается новое значение выходной частоты. Схема полностью готова к появлению и фиксации нового значения максимума активной потребляемой двигателе мощности.
При появлении очередного максимума активной мощности работа схемы повторяется.
Величина скачка частоты питания выбирается из условия максимальной чувствительности схемы фиксации максимума активной мощности и в реальной системе составляет величину порядка 15-20 Гц.
После достижения частотой питания конечного значения, схема контроля частоты (блок 6, фиг.2) вырабатывает сигнал управления на отключение схемы. Однако отключение схемы производится с некоторой выдержкой времени, необходимой для подтягивания скорости вращения гиродвигателя до заданного значения. При этом блокируется выход тактового генератора для предотвращения дальнейшего наростания частоты.
Этим достигается высокая точность конечного значения скорости вращения ротора гиродвигателя. На этом разгон заканчивается.
Предложенное устройство форсированного частотного разгона асинхронного гиродвигателя позволяет осуществлять разгон в строго заданное время (независимо от условий окружающей среды) при минимальных затратах электроэнергии. Так, в сравнении с устройством по авторскому свидетельству 73528 величина тока потребления гиродвигателя ИАВ760-11 может быть уменьшена на 0,9 А. (3,5 А вместо 4,4 А) при некотором уменьшении времени разгона (25 сек вместо 30).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1974 |
|
SU1840210A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО РАЗГОНА АСИНХРОННЫХ ГИРОДВИГАТЕЛЕЙ | 1972 |
|
SU1840124A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ФОРСИРОВАННОГО РАЗГОНА ГИРОДВИГАТЕЛЕЙ | 1969 |
|
SU1840168A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1973 |
|
SU1840121A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного гиродвигателя | 1981 |
|
SU989729A1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2541072C2 |
Изобретение относится к электротехнике. Технический результат заключается в сокращении времени разгона, в помехоустойчивости и в расширении области применения. Сущность изобретения состоит в том, что в устройство, содержащее регулятор напряжения, статический преобразователь, вход которого соединен с выходом регулятора напряжения, а его выход подключен к гиродвигателю и через цепь обратной связи по току нагрузки к входу регулятора напряжений, управляемый задающий генератор синхронизации, подключенный ко второму входу преобразователя, введены датчики активной мощности, схемы фиксации максимума активной мощности и ждущий мультивибратор, причем датчик активной мощности включен между статическим преобразователем и гиродвигателем, а через схему фиксации он соединен со ждущим мультивибратором, выход которого подключен к входной цепи управляемого задающего генератора синхронизации. 7 ил.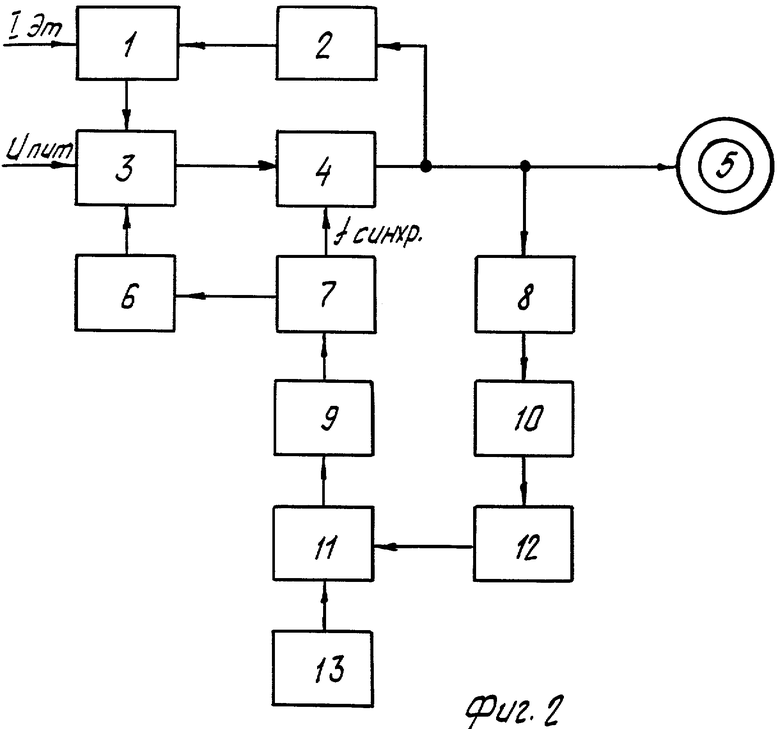
Устройство для форсированного частотного разгона асинхронного электродвигателя, содержащее регулятор напряжения, статический преобразователь, вход которого соединен с выходом регулятора напряжений, а его выход подключен к гиродвигателю и через цепь обратной связи по току нагрузки к входу регулятора напряжений, управляемый задающий генератор синхронизации, подключенный к второму входу преобразователя, отличающееся тем, что, с целью сокращения времени разгона, помехоустойчивости и расширения области применения, в устройство введены датчик активной мощности, схема фиксации максимума активной мощности и ждущий мультивибратор, причем датчик активной мощности включен между статическим преобразователем и гиродвигателем, а через схему фиксации он соединен со ждущим мультивибратором, выход которого подключен к входной цепи управляемого задающего генератора синхронизации.

