Настоящее изобретение относится к электротехнике, а именно к устройствам для автоматического форсированного частотного разгона асинхронных гиродвигателей. Предлагаемое изобретение в настоящее время используется для группового разгона гиродвигателей ракет 8К67М и 15A20.
Ранее для форсированного разгона асинхронных гиродвигателей системы управления баллистических ракет применялись статические преобразователи (например, 15H520, 8H0127M и др.), построенные на амплитудном способе разгона, когда на период разгона к гиродвигателю подводится повышенное напряжение при постоянной частоте.
Основные недостатки применяемых устройств заложены в самом способе амплитудного разгона и выражаются в следующем:
а) большей установленной мощности первичного источника питания и устройства разгона по сравнению с установками, реализующими частотные методы форсированного разгона;
б) повышенном нагреве гиродвигателя и снижении вследствие этого точности гироузла в целом;
в) недостаточном сокращении времени разгона по сравнению с частотным способом как вследствие ограничений, накладываемых на величину тока через гибкие токоподводы, так и вследствие вообще низкой эффективности регулирования скорости вращения асинхронного гиродвигателя при помощи изменения только величины питающего напряжения.
Известны также и установки для форсированного частотного разгона асинхронных гиродвигателей.
С целью ликвидации указанных недостатков предлагается устройство для автоматического форсированного разгона группы асинхронных гиродвигателей, позволяющее осуществлять частотный разгон при наличии ограничений по току потребления, величине и форме питающего напряжения гиродвигателей.
Сущность предлагаемого изобретения поясняется чертежами, где
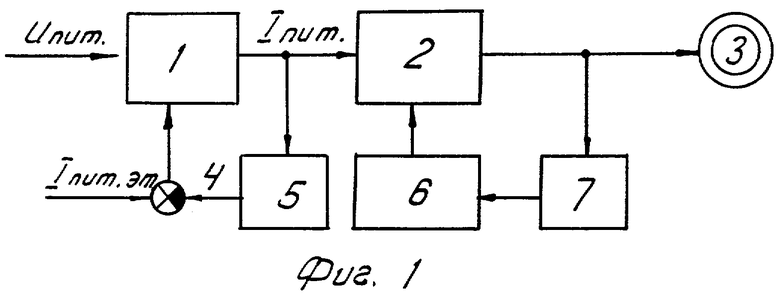
на фиг.1 показана блок-схема известного устройства для частотного разгона асинхронного гиродвигателя;
на фиг.2 - блок-схема предлагаемого устройства для автоматического форсированного разгона группы асинхронных гиродвигателей;
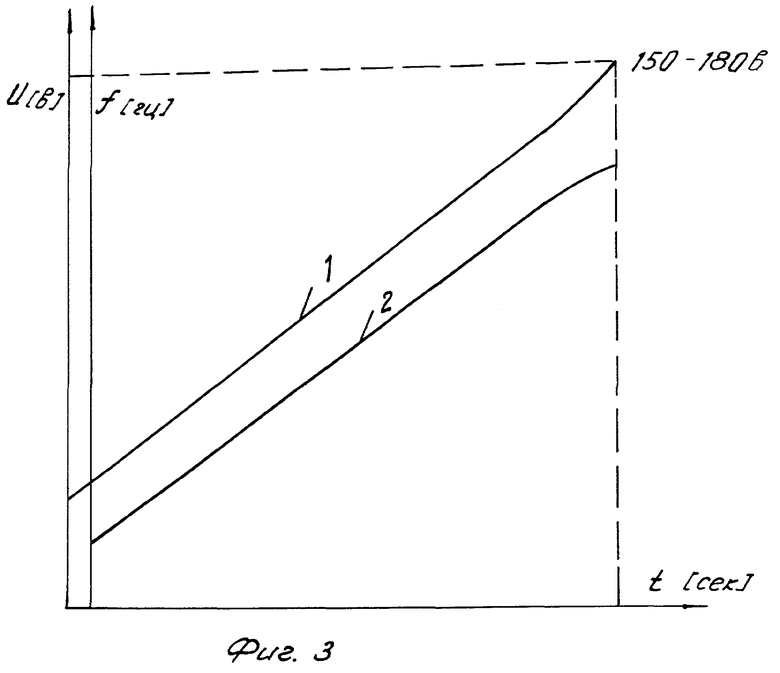
на фиг.3 - закон изменения напряжения и частоты, реализуемый известным устройством;
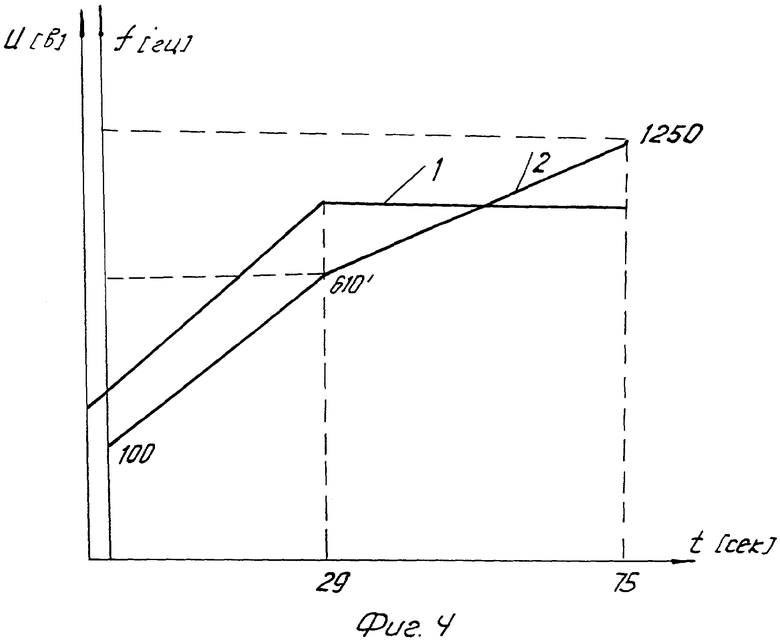
на фиг.4 - закон изменения напряжения и частоты, реализуемый предлагаемым устройством,
На фиг.1 цифрами обозначены регулятор напряжения питания 1, преобразователь 2, гиродвигатель 3, измерительный орган тока потребления преобразователя 4, цепи обратной связи по току потребления преобразователя 5, управляемый задающий генератор 6, устройство для выделения ЭДС 7. Буквами обозначены Uпит - напряжение питания, Iпит и Iпит.эт - соответственно ток питания преобразователя и эталонный ток.
На фиг.2 цифрами обозначены широтно-импульсный регулятор напряжения питания преобразователя 1, преобразователь 2, гиродвигатель или группа гиродвигателей 3, программный задающий генератор направленного действия 4, переключатель обратных связей 5, схема контроля выходного напряжения 6, измерительный орган схемы контроля выходного напряжения 7, цепь обратной связи по напряжению 8, цепь обратной связи по напряжению 8а, измерительный орган канала стабилизации выходного напряжения преобразователя 9, измерительный орган канала стабилизации тока нагрузки преобразователя 10, цепь обратной связи по току нагрузки преобразователя 11. Буквами обозначены Uпит - напряжение питания, Iэт - ток двигателя эталонный, Uэт - эталонное напряжение, f1 - изменяющаяся по определенному заданному закону частота преобразователя.
На фиг.3 и 4 цифрой 1 обозначен закон изменения напряжения во времени, цифрой 2 - закон изменения частоты. Буквами U [В], f [гц] и t [сек] обозначены соответственно напряжение частоты и время разгона.
Приведенная на фиг.1 схема известного устройства поясняет сущность существовавшего до предложения способа частотного разгона асинхронного гиродвигателя.
Устройство работает следующим образом. Для получения режима постоянного потока используется стабилизатор тока питания Iпит на стороне постоянного тока преобразователя (цепь обратной связи 5, измерительный орган тока потребления 4, регулятор напряжения 1).
Частотно-задающее устройство обеспечивает постоянство отношений ЭДС двигателя и выходной частоты преобразователя. В этом случае предусматривается включение между преобразователем 2 и нагрузкой (гиродвигателем) 3 устройства для замера ЭДС 7 (например, в виде индуктивных или активных сопротивлений, имитирующих статорную цепь гиродвигателя, или любых других устройств), которое воздействует на управляемый задающий генератор 6.
Из фиг.3 видно, что закон изменения выходного напряжения и частоты преобразователя носит линейно-возрастающий характер, причем выходное напряжение превышает в конце разгона номинальное значение в 4-5 раз. Из анализа рассмотренной схемы устройства для частотного разгона вытекают следующие недостатки.
1. Низкая стабильность тока потребления гиродвигателя, вызванная тем, что звено преобразователя не охвачено обратной связью.
2. Необходимость применения косвенных методов замера ЭДС и связанные с этим погрешности в реализации частотного закона.
3. Устройство работоспособно тогда, когда отсутствуют ограничения, накладываемые на величину напряжения нагрузки (т.е. на напряжение, прикладываемое к гиродвигателю).
Известно, что в большинстве типов гиродвигателей максимальная величина прикладываемого напряжения ограничивается 100-125 В. Если же ограничить величину тока таким значением, что напряжение на гиродвигателе в конце разгона не будет превышать указанные значения, то время разгона резко увеличивается, так как вращающий момент гиродвигателя зависит от квадрата тока статора.
4. При использовании данного устройства время разгона будет зависеть от температуры окружающей среды, температуры гиродвигателя и разброса его параметров, т.е. будет различно при каждом отдельном запуске (колеблется от запуска к запуску). Это является неприемлемым для существующих в настоящее время ракетных комплексов, так как будет нарушаться график набора готовности систем.
5. Данное устройство не позволяет производить групповой разгон гиродвигателей гиростабилизированной платформы ракеты, имеющей три гиродвигателя. Применение этого устройства приводит к увеличению кабельной сети ракеты, а различное время разгона каждого отдельного гиродвигателя делает его практически неприемлемым. В силу указанных недостатков подобные устройства не нашли применения в ракетных комплексах.
В устройстве, выполненном согласно предлагаемому изобретению (см.фиг.2), функции задания частоты и регулирования тока гиродвигателя разделены.
Данное обстоятельство позволяет задать любой желаемый темп нарастания частоты преобразователя, а также ограничить, при желании, выходное напряжение преобразователя на любом уровне.
Задание частоты выполняется программным задающим генератором направленного действия 3, который выдает частоту на преобразователь 2 по любому требуемому закону. Например, в начальный период разгона темп нарастания частоты поддерживается таким, чтобы сохранилось максимальное значение момента двигателя до начала ограничения напряжения преобразователя, а затем темп нарастания частоты несколько снижается.
Программный задающий генератор включается на вход преобразователя 2.
Регулирование выходного напряжения и тока нагрузки производится по отдельным независимым друг от друга и от программного задающего генератора каналам, которые охватывают выходные цепи преобразователя и вход регулятора напряжения.
Цепь обратной связи по напряжению 8 (см. фиг.2) включена на вход переключателя обратных связей через измерительный орган схемы контроля выходного напряжения 7 и схему контроля выходного напряжения 6.
Цепь обратной связи по напряжению 8а канала стабилизации выходного напряжения включена на вход регулятора напряжения 1 через измерительный орган канала стабилизации напряжения 9 и переключатель обратных связей 5. Цепь обратной связи по току 11 включена на вход регулятора напряжения 1 через измерительный орган канала стабилизации тока нагрузки преобразователя 10 и переключатель обратных связей 5.
При пуске одного гиродвигателя (или группы гиродвигателей) разгон примерно до половины номинальной скорости ротора осуществляется при постоянном токе потребления гиродвигателя (гиродвигателей), т.е. работает обратная связь по току нагрузки преобразователя 11, измерительный орган канала стабилизации тока нагрузки преобразователя 10, первый канал переключателя обратных связей 5, регулятор напряжения 1.
Выходное напряжение преобразователя при этом линейно возрастает до определенного (заранее установленного) предела (см. фиг.4), уровень которого отслеживается схемой контроля выходного напряжения 6, которая и осуществляет переключение входа регулятора напряжения литания преобразователя с обратной связи по току нагрузки 11 на обратную связь по напряжению преобразователя 8а (т.е. начинает работать обратная связь по выходному напряжению преобразователя 8а, измерительный орган канала стабилизации выходного напряжения 9 и второй канал переключателя обратных связей 5).
Кроме того, данное устройство разгона может быть применено во всех ранее разработанных ракетных комплексах без замены гироузлов изделий, т.е. допускает модернизацию существующих объектов для увеличения их мобильности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО ЧАСТОТНОГО РАЗГОНА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1974 |
|
SU1840011A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
| СПОСОБ РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1974 |
|
SU1840210A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО РАЗГОНА АСИНХРОННЫХ ГИРОДВИГАТЕЛЕЙ | 1972 |
|
SU1840124A2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1973 |
|
SU1840121A2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА, СОЗДАНИЯ И АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ РЕЖИМА ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 1971 |
|
SU1840062A1 |
| Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного гиродвигателя | 1981 |
|
SU989729A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| Регулятор напряжения синхронного генератора электромашинного преобразователя | 1987 |
|
SU1525857A2 |
Изобретение относится к области электротехники. Техническим результатом является сокращение времени разгона и снижения установленной мощности питания. В устройстве, содержащем преобразователь рода тока, регулятор напряжения и регулятор частоты, в качестве регулятора частоты использован программный задающий генератор направленного действия. В измерительную цепь регулятора напряжений включен блок контроля. 4 ил.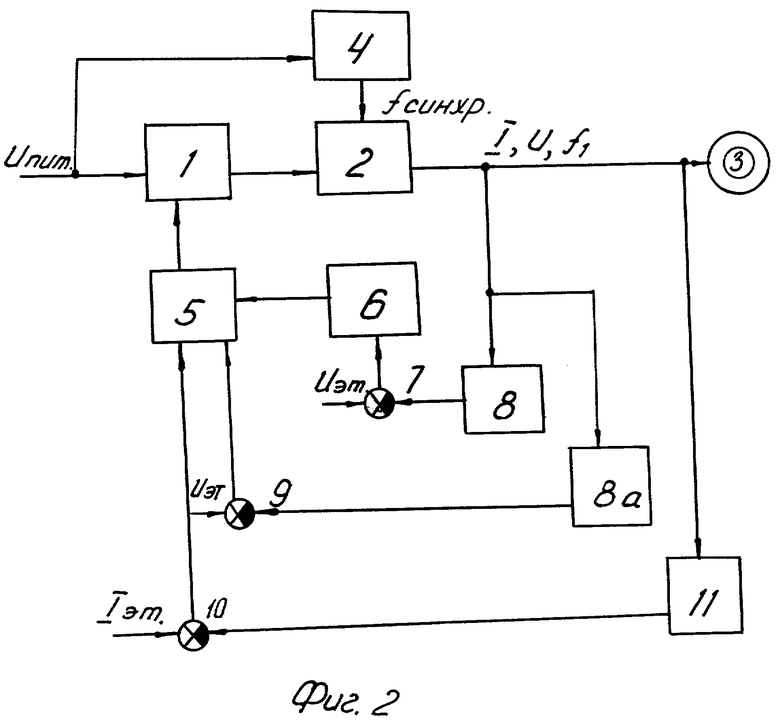
Устройство для автоматического форсированного разгона гиродвигателей, содержащее преобразователь рода тока, подключенный с помощью регулятора напряжения к сети и снабженный регулятором частоты, отличающееся тем, что, с целью сокращения времени разгона и снижения установленной мощности источника питания, в качестве регулятора частоты применен программный задающий генератор направленного действия, а в измерительную цель регулятора напряжения включен блок контроля, который осуществляет переключение входа регулятора с канала регулирования по току на канал регулирования по напряжению при достижении выходным напряжением заданного уровня.

