Настоящее изобретение относится к электротехнике, а именно к устройствам для форсированного разгона асинхронных гиродвигателей, установленных на подвижных объектах (например, ракетах). Известны устройства для форсированного частотного разгона асинхронных гиродвигателей, выполненные в виде статического преобразователя постоянного тока, в котором регулирование частоты и амплитуды выходного напряжения осуществляется по определенному закону, путем введения программного задающего генератора частоты и обратных связей по току и напряжению.
Недостатками таких устройств являются:
1. Непостоянство величины вращающего момента гиродвигателя вследствие ограничения величины питающего напряжения.
2. Реализация закона нарастания частоты питающего напряжения программным устройством без дополнительной корректировки закона на условия запуска и технологические разбросы. В результате этого имеются значительные разбросы конечной скорости вращения гиродвигателей одного типа, а также разбросы, обусловленные различием условий запуска. Это отрицательно сказывается на выполнении основной задачи гироскопическим устройством. И, кроме того, такой запуск не является оптимальным с точки зрения быстродействия.
Известно, что если осуществить стабилизацию тока потребления и поддержания каким-либо образом величины абсолютного скольжения на оптимальном уровне, определяемом выражением [1],
где  - абсолютное скольжение АГД;
- абсолютное скольжение АГД;
r2', rм, xм, x2' - соответственно, активное сопротивление ротора, намагничивающего контура, индуктивные сопротивления намагничивающего контура с ротора АГД,
то момент гиродвигателя имеет максимальное значение за время запуска.
Целью настоящего изобретения является реализация оптимальных условий запуска, а также ликвидация недостатков программной системы частотного разгона.
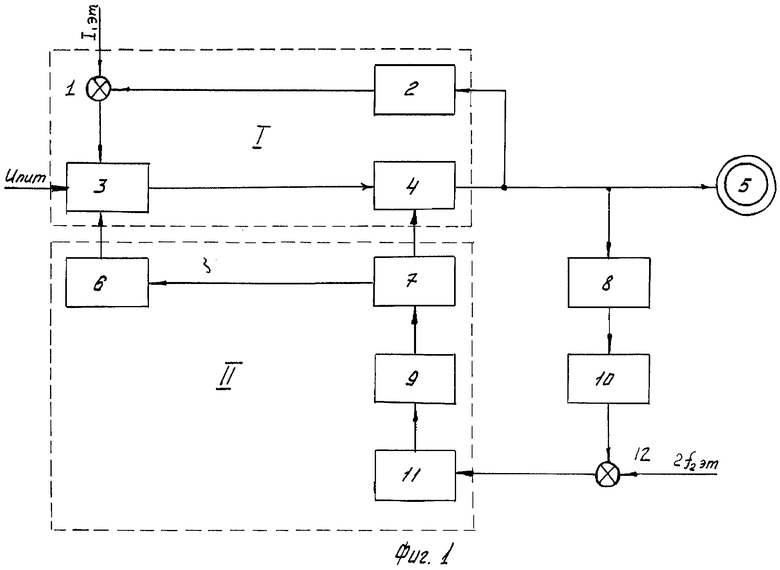
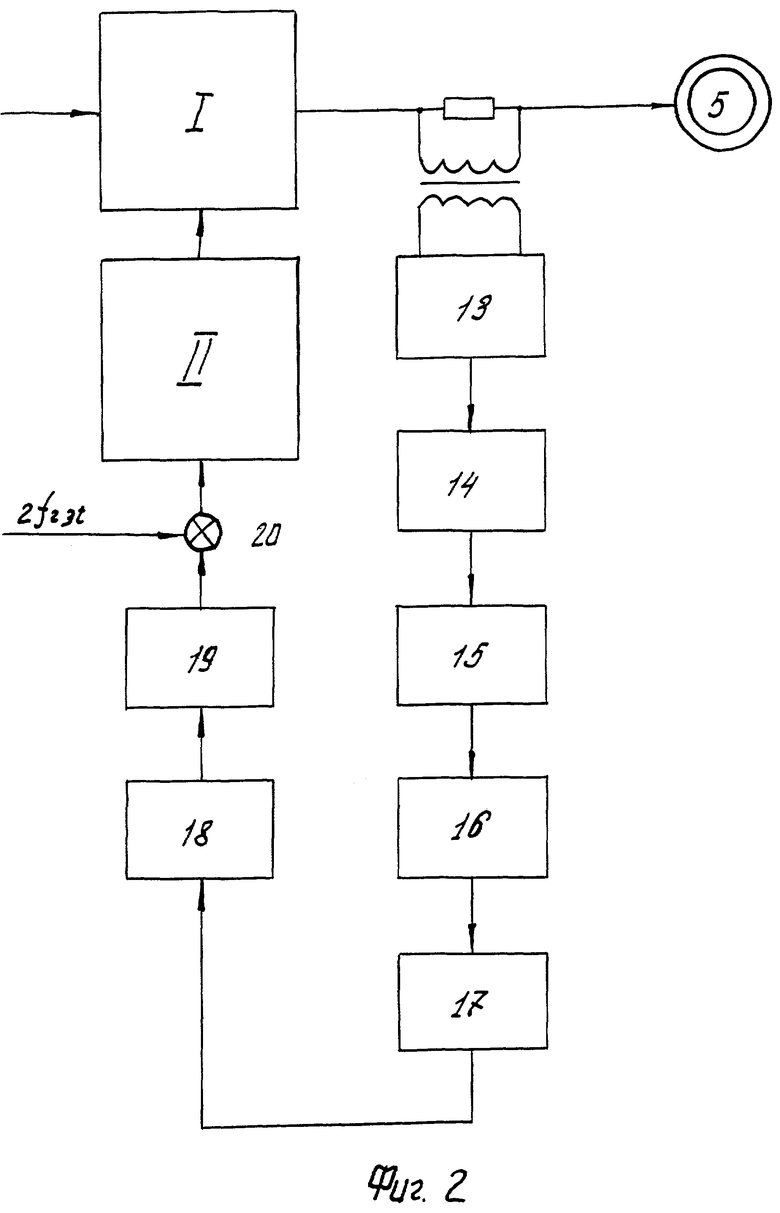
Сущность изобретения поясняется чертежами, где на фиг.1 приведена блок-схема предлагаемого устройства, на фиг.2 - блок-схема канала стабилизации частоты скольжения ротора. На фиг.3 - принципиальная схема канала стабилизации скольжения ротора как один из вариантов реального осуществления предлагаемого изобретения.
На фиг.1 цифрами обозначены:
Квадрат 1, ограниченный пунктирной линией, включает блоки статического преобразователя со стабилизацией тока нагрузки. Квадрат II включает блоки программного задающего генератора.
1 - Измерительный орган канала стабилизации тока потребления АГД.
2 - Цепи обратной связи по току потребления АГД.
3 - Широтно-импульсный регулятор напряжения питания.
4 - Преобразователь.
5 - Гиромотор.
6 - Цепь контроля частоты питания.
7 - Управляемый генератор.
8 - Схема выделения сигнала частоты скольжения.
9 - Генератор линейно-изменяющегося тока.
10 - Схема контроля наличия частоты скольжения.
11 - Тактовый генератор.
12 - Измерительный орган канала стабилизации частоты скольжения.
Ротор гиродвигателя 5 имеет две радиально расположенные проточки для получения сигнала частоты скольжения, который в виде низкочастотной составляющей 2f2 модулирует частоту питания. Глубина модуляции составляет 0,5-2% от амплитуды тока потребления. Указанная составляющая выделяется с одного из сопротивлений R, включенных в фазы питания гиродвигателя. Эти сопротивления одновременно служат для выделения сигнала, пропорционального току потребления АГД.
На фиг.2. цифрами обозначены:
I - Преобразователь со схемой стабилизации.
II - Программный задающий генератор.
13 - Двухтактный выпрямитель.
14 - Схема отделения постоянной составляющей.
15 - Резонансный фильтр.
16 - Полосовой усилитель.
17 - Усилитель преобразователь.
18 - Усилитель мощности.
19 - Схема контроля наличия сигнала.
20 - Измерительный орган частоты скольжения.
Работа схемы происходит следующим образом.
При включении напряжения питания программный генератор начинает вырабатывать программный закон нарастания частоты питания АГД. Происходит это следующим образом. Тактовый генератор вырабатывает, в отсутствие сигнала на его входе, напряжение прямоугольной формы с номинальной частотой. Это напряжение посредством генератора линейно-изменяющегося тока, представляющего собой цифроаналоговый преобразователь, собранный на триггерах и транзисторных ключах, преобразуется в линейно-ступенчатое изменение тока в обмотке управления выходного управляемого генератора. Последний выдает на вход преобразователя линейно-возрастающее по частоте синхронизирующее напряжение постоянной амплитуды. Канал стабилизации тока потребления АГД обеспечивает поддержание постоянной величины тока потребления АГД в процессе всего разгона. Гиродвигатель начинает разгоняться. Начиная с некоторого момента времени (порядка 5-7 сек), глубина модуляции тока потребления частотой скольжения, выделяемого с сопротивления R, оказывается достаточной для захвата сигнала частоты скольжения схемой выделения названного сигнала. В этот момент величина частоты ротора существенно отличается от частоты статора. Выделенный сигнал после преобразования и усиления до необходимой величины поступает на схему контроля наличия сигнала.
Схема контроля, при наличии сигнала частоты скольжения, выдает разрешение на корректировку программного закона нарастания частоты, соответствующей коммутацией входа тактового генератора.
Усиленный сигнал поступает на вход измерительного мостового фазочувствительного органа частоты, с выхода которого снимается знакопеременный сигнал, поступающий через коммутирующие цепи схемы контроля наличия сигнала частоты на вход тактового генератора программного задающего генератора.
В отсутствие сигнала на входе тактового генератора последний вырабатывает постоянную частоту, и на выходе программного генератора вырабатывается закон нарастания первичной частоты, имеющей постоянный наклон (темп роста частоты постоянный). В том случае, когда на входе тактового генератора появляется сигнал того или иного знака, последний изменяет соответствующим образом свою частоту, изменяя тем самым наклон характеристики f(t) (темп нарастания первичной частоты).
При работе автоматической системы наклон этой характеристики изменяется таким образом, чтобы с момента появления сигнала частоты скольжения последняя поддерживалась на заданном уровне. Пусть, например, частота тока ротора уменьшилась (увеличилась), тогда с выхода измерительного органа частоты скольжения поступает на вход тактового генератора сигнал такого знака, что частота тактового генератора увеличится (уменьшится). Наклон характеристики f(t) увеличится (уменьшится), тем самым темп роста частоты статора будет увеличиваться (уменьшаться) до тех пор, пока не будет отработан сигнал рассогласования. Так как программный закон нарастания частоты выбран близким к оптимальному, то возможна работа на отдельных участках разгона без корректировки закона.
В отличие от схемы, предложенной в [2], здесь возможно поддержание величины скольжения с ошибкой, которая определяется лишь ошибкой измерительного органа частоты, которая может быть получена достаточно малой. В схеме [2] сигнал ошибки используется для формирования (а не для корректировки) закона нарастания частоты, а поэтому для получения нарастающего характера частоты необходимо и увеличение абсолютного значения сигнала рассогласования по частоте скольжения.
При достижении частоты питания заданного значения срабатывает схема контроля частоты питания и выдает сигнал на окончание разгона. Наличие схемы контроля частоты скольжения, а также то обстоятельство, что максимальное значение частоты выходного генератора определяется величиной сопротивления в коллекторах ключей аналогового преобразователя, которые не изменяются в процессе разгона, а следовательно, обеспечивают строго фиксированное начальное и конечное значение частоты выходного генератора, обеспечивает высокую точность (<2%) получения конечного значения частоты вращения АГД при работе схемы стабилизации частоты скольжения.
Таким образом, одной из главных отличительных особенностей предлагаемой схемы является воздействие сигнала рассогласования на вход тактового генератора, а не на вход выходного генератора, что обеспечивает астатический эффект работы схемы, так как схема работает по принципу интегрирующей цепи.
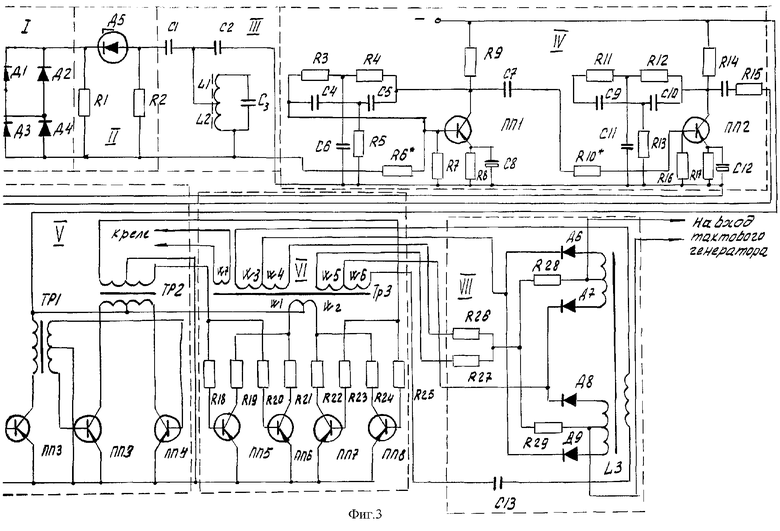
Принципиальная схема канала выделения сигнала частоты скольжения представлена на фиг.3.
На фиг.3 цифрами обозначены:
I - Д1-Д4 двухтактный выпрямитель сигнала, пропорционального току потребления АГД. Применение двухтактного выпрямителя позволяет увеличить помехоустойчивость схемы, так как частота питания, которая на начальном участке разгона, когда частоты сигнала и питания близки, представляет собой помеху для схемы выделения сигнала, оказывается более разнесенной от заданного значения частоты скольжения.
II - Схема отделения постоянной составляющей, собранная на стабилитроне Д5 и сопротивлениях R1, R2.
III - C1, C2, С3, и L1, L2 - резонансный фильтр, настроенный на частоту сигнала, выполненный по обычной схеме.
IV - Полосовой усилитель для усиления сигнала частоты скольжения, выполненный на двух транзисторах ПП1, ПП2, сопротивлениях R3-R17 и конденсаторах С4-С12, по обычной схеме.
V - ПП3, Тр1 - однотактный усилитель-преобразователь, выполненный по обычной схеме.
VI - ПП5-ПП8, Tp2-Тр3 - усилитель мощности.
VII - Схема контроля наличия сигнала, выполненная на четырех диодах Д6-Д9, Тр3 и С13, L3.
С обмотки W7 трансформатора Тр напряжение подается на схему контроля наличия сигнала, которая представляет собой реле, через нормально разомкнутые контакты которого напряжение с выхода моста подается на вход тактового генератора. Реле срабатывает при определенной величине сигнала на обмотке, т.е. при наличии сигнала частоты скольжения.
Возможны другие варианты исполнения схемы устройства для форсированного разгона асинхронных гиродвигателей, которые не выходят за рамки изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1974 |
|
SU1840210A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО ЧАСТОТНОГО РАЗГОНА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1974 |
|
SU1840011A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ФОРСИРОВАННОГО РАЗГОНА ГИРОДВИГАТЕЛЕЙ | 1969 |
|
SU1840168A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО РАЗГОНА АСИНХРОННЫХ ГИРОДВИГАТЕЛЕЙ | 1972 |
|
SU1840124A2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1973 |
|
SU1840121A2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА, СОЗДАНИЯ И АВТОМАТИЧЕСКОГО ПОДДЕРЖАНИЯ РЕЖИМА ПЕРЕВОЗБУЖДЕНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ДВИГАТЕЛЯ | 1971 |
|
SU1840062A1 |
| Статический преобразователь с блоком импульсного перевозбуждения для питания гистерезисного гиродвигателя | 1981 |
|
SU989729A1 |
| ПРОГРАММНЫЙ ЗАДАЮЩИЙ ГЕНЕРАТОР НАПРАВЛЕННОГО ДЕЙСТВИЯ | 1982 |
|
SU1840198A1 |
| Электропривод гироскопов в составе гироплатформы | 1990 |
|
SU1810758A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2383863C1 |
Изобретение относится к области электротехники. Техническим результатом является повышение быстродействия. Устройство содержит преобразователь рода тока, регулятор напряжения с обратной связью по току к сети. В качестве регулятора частоты используется задающий генератор. Для достижения технического результата к задающему генератору подключена цепь обратной связи по частоте скольжения, состоящая из блока выделения сигнала частоты скольжения, блока контроля наличия этой частоты и измерительного фазочувствительного органа, подключенного к входу задающего генератора. Устройство может быть снабжено дополнительным реле, блокирующим вход генератора. 1 з.п. ф-лы, 2 ил.