Предлагаемое изобретение относится к электротехнике, а именно к способам форсированного частотного разгона асинхронных двигателей.
Известен способ форсированного частотного разгона асинхронного двигателя, при котором стабилизируется ток потребления двигателя, а закон нарастания частоты питания регулируется таким образом, чтобы обеспечивалось приблизительное постоянство частоты абсолютного скольжения двигателя, близкого к оптимальному значению (см., например, авт. св. №1840168). Для этой цели устройство содержит программный задающий генератор направленного действия, который и обеспечивает указанный закон нарастания частоты на выходе устройства. В системе имеется также контур стабилизации тока потребления гиродвигателя.
Эта система наряду с такими достоинствами, как, например, простота выполнения, возможность использования ее для разгона любых серийно выпускаемых гиродвигателей, обладает недостатками, свойственными системам регулирования, работающим по разомкнутому циклу: малой точностью получения регулируемого параметра, в данном случае, абсолютного скольжения двигателя, относительно невысокой экономичностью разгона, связанной с необходимостью обеспечения определенного запаса по частоте абсолютного скольжения при работе.
Известна другая система форсированного частотного разгона, в которой оптимальная величина абсолютного скольжения поддерживается автоматически за счет изменения времени пуска двигателя (см., например, авт. св. №1840169).
В этой системе двойная частота абсолютного скольжения, модулирующая ток потребления гиродвигателя, выделяется фильтром, усиливается и сравнивается с эталонным значением.
Сигнал отклонения двойной частоты абсолютного скольжения от заданного значения управляет темпом нарастания частоты питания гиродвигателя таким образом, чтобы величина абсолютного скольжения поддерживалась постоянной в пределах допуска.
Данная система форсированного разгона позволяет получать с достаточно высокой точностью заданное значение частоты вращения гиродвигателя в конце разгона, к.п.д. ее выше, нежели программной системы разгона, за счет поддержания абсолютного скольжения, более близкого к оптимальному значению.
Эта система обладает следующими недостатками:
- сигнал управления, модулирующий ток потребления, по абсолютному значению равен двойному значению частоты тока ротора, в связи с чем выделение этого сигнала возможно только при сравнительно высоком значении частоты питания (≤260 Гц при номинальной частоте питания двигателя 1000 Гц), поэтому эта система выполняется комбинированной: нарастание частоты питания от начального значения (85 Гц) до значения 260 Гц осуществляется по программе, а затем до значения 1040 Гц осуществляется управляемый разгон с автоматическим поддержанием абсолютного скольжения;
указанное обстоятельство усложняет эту систему:
- в связи с изменением степени насыщения стали гиродвигателя в процессе разгона, для получения строго оптимальных условий пуска необходимо изменять в определенных пределах величину абсолютного скольжения, а не поддерживать ее неизменной, как это имеет место в указанной системе;
- при разгоне с поддержанием абсолютного скольжения гиродвигателя для получения устойчивого запуска в различных условиях окружающей среды и при наличии технологических разбросов параметров гиродвигателей величина абсолютного скольжения выбирается заниженной по сравнению с оптимальным значением его при нормальных условиях пуска, это обстоятельство увеличивает время пуска гиродвигателя и ухудшает энергетику системы;
- введение конструктивных доработок в гиродвигатель, связанных с получением сигнала абсолютного скольжения, ухудшает технологичность гироприбора.
Для ликвидации указанных недостатков предлагается способ форсированного частотного разгона асинхронных двигателей, основанный на регулировании частоты питания в зависимости от максимума потребляемой двигателей активной мощности при стабилизации его тока потребления.
Рассмотрение энергетической диаграммы асинхронного двигателя показывает, что в случае стабилизации тока статора максимуму потребляемой активной мощности соответствует максимум электромагнитного момента двигателя, так как потери в меди статора и ротора постоянны. Это подтверждается экспериментально, результаты эксперимента будут приведены ниже.
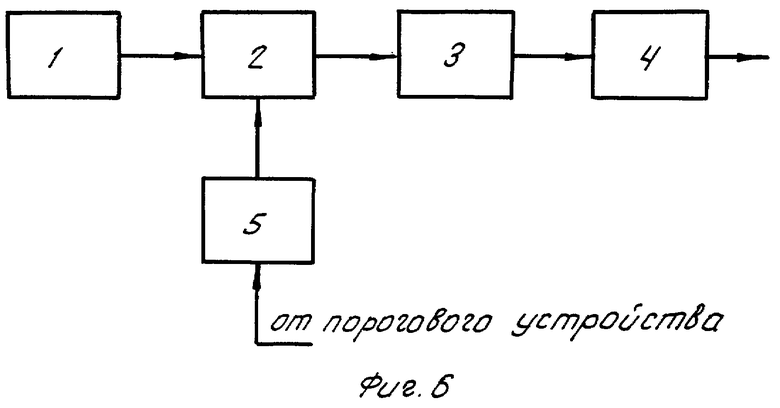
Сущность предлагаемого способа форсированного разгона поясняется чертежами, где на фиг.1 изображена блок-схема устройства, реализующего указанный способ;
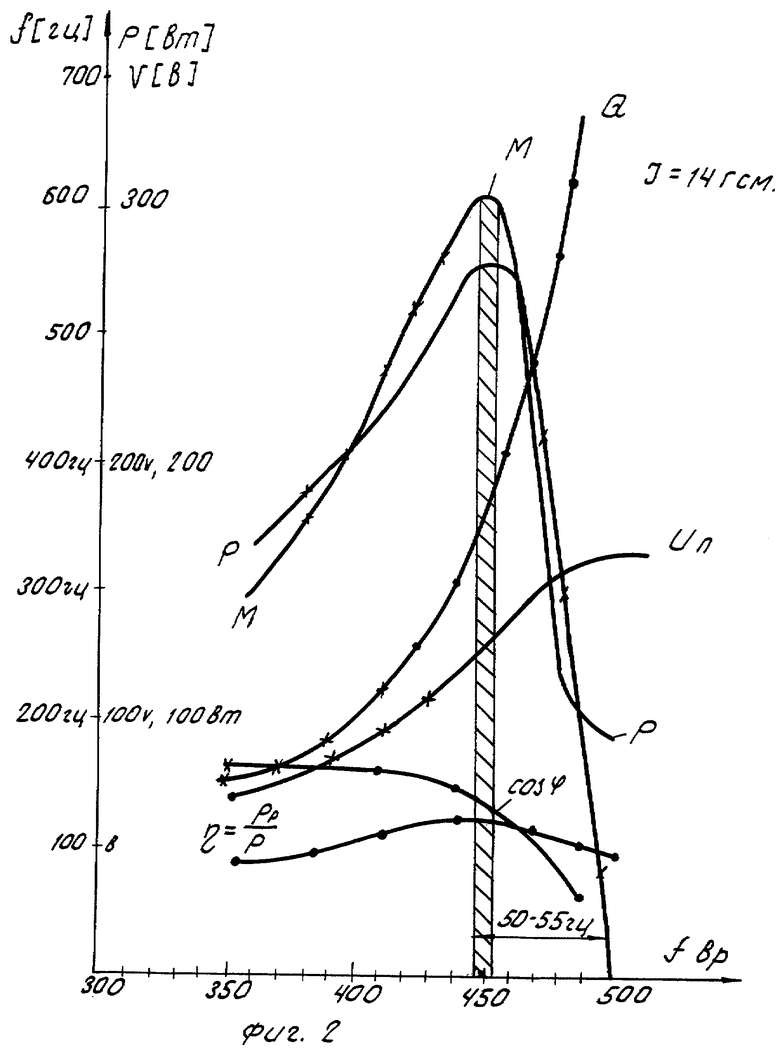
на фиг.2 - характеристики асинхронного гиродвигателя типа ИАВ-760;
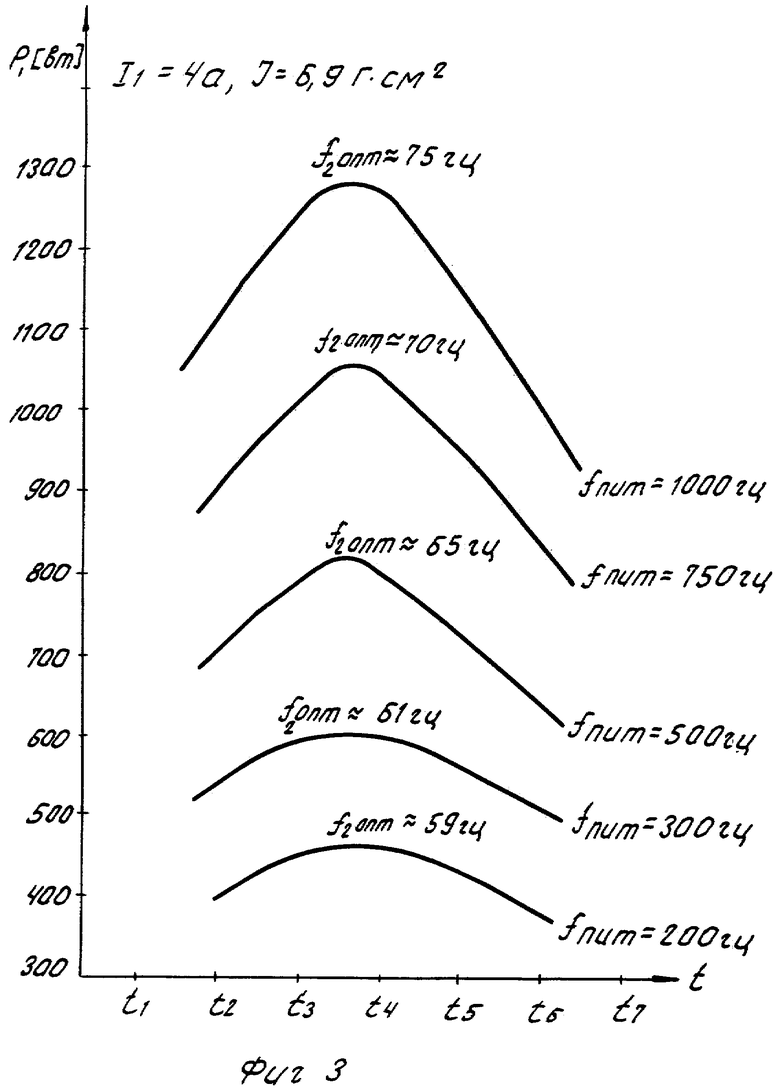
на фиг.3 - кривые потребляемой активной мощности двигателем типа ИАВ-760 при различных частотах питания и токе статора, равном 4 А, в условно совмещенной оси времени;
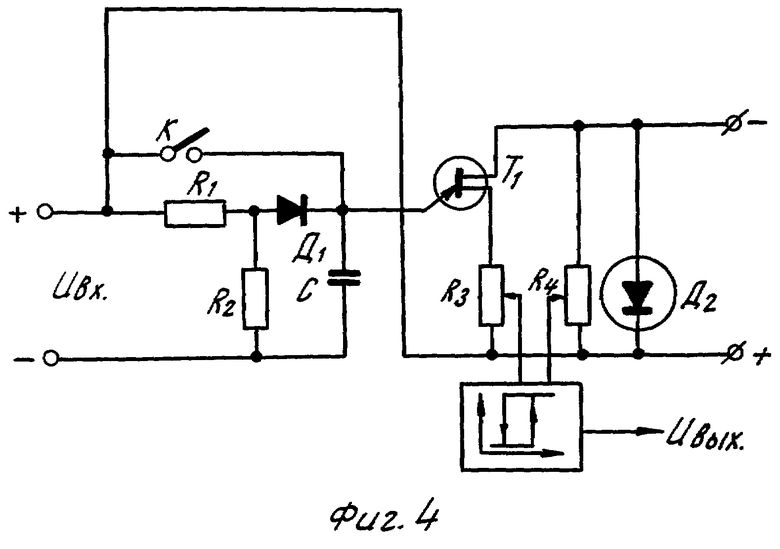
на фиг.4 - схема датчика активной мощности;
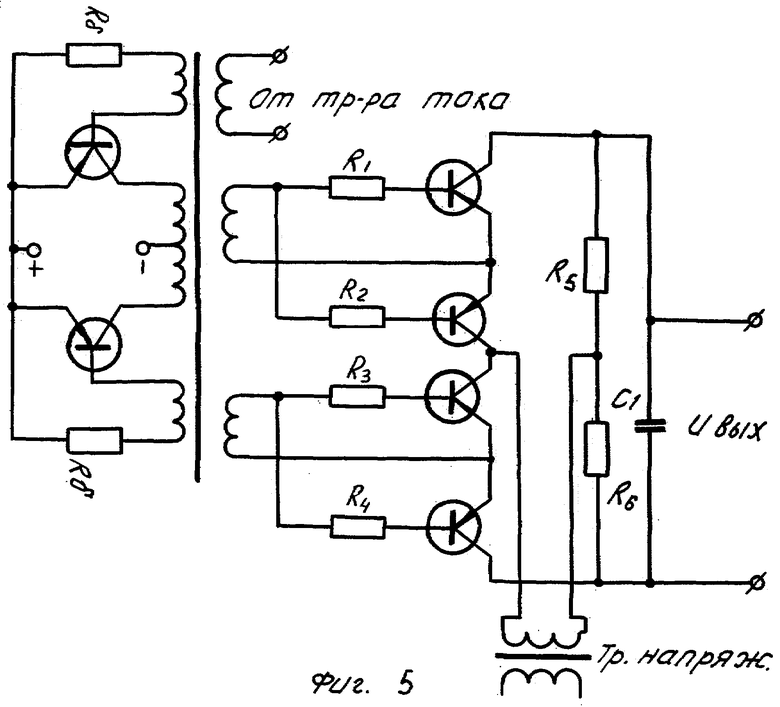
на фиг.5 - схема фиксации максимума активной мощности;
на фиг.6 - вариант построения блок-схемы транзисторного задающего генератора.
На фиг.1 приняты следующие обозначения:
1 - измерительный орган канала стабилизации тока нагрузки;
2 - цепи обратной связи по току нагрузки;
3 - регулятор напряжения;
4 - статический преобразователь;
5 - гиродвигатель;
6 - управляемый генератор;
7 - датчик активной мощности;
8 - пороговое устройство (триггер Шмитта);
9 - схема фиксации максимума.
На чертежах приняты следующие обозначения:
Uпит - напряжение питания;
Iэт - эталонное значение тока измерительного органа канала стабилизации тока;
I, fпит, P - ток потребления, частота питания и активная мощность двигателя;
f синх - частота синхронизации преобразователя.
На фиг.2 приведены характеристики гиродвигателя, снятые при частоте питания 600 Гц,
На фиг.3 представлены кривые потребляемой активной мощности асинхронным гиродвигателем типа ИАВ-760, снятые при различных фиксированных частотах питания. Кривые условно совмещены во времени.
На фиг.5 приняты следующие обозначения:
1 - тактовый генератор;
2 - электронный ключ;
3 - цифроаналоговый преобразователь;
4 - выходной управляемый генератор.
Работа схемы производится следующим образом. При подаче напряжения питания начинает работать задающий генератор, который представляет собой однофазный преобразователь с подмагничиваемыми промежуточными трансформаторами [Л.1]. Одна из обмоток управления указанных трансформаторов через резистор включается на напряжение питания и обеспечивает тем самым начальное значение частоты синхронизации.
Другая (основная) обмотка управления подключена к источнику питания через резисторы и ключи кольцевого счетчика.
Последний может быть выполнен на тиристорах [Л.3].
Срабатывание каждого последующего тиристора кольцевого счетчика обеспечивает скачок частоты синхронизации, а следовательно, частоты на выходе преобразователя на определенную величину. Приведение схемы счетчика в исходное состояние (Пуск) может быть обеспечено контактами реле, срабатывающего, например, при подключении напряжения питания.
При появлении частоты синхронизации на входе преобразователя последний вырабатывает начальное значение частоты питания гиродвигателя, по обмоткам которого начинает протекать ток, который стабилизируется на заданном уровне контуром стабилизации тока (1, 2, 3, 4). Двигатель начинает разгоняться при начальном значении частоты питания.
При этом блок (7) производит непрерывный замер потребляемой двигателем активной мощности из источника (4). Как следует из кривых, изображенных на фиг.2 и 3, в определенный момент времени потребляемая двигателем активная мощность достигает максимального значения для данной частоты питания. Такой же характер изменения имеет сигнал на выходе датчика мощности (фиг.4). Как только активная мощность и сигнал на выходе датчика активной мощности перейдет точку максимума, транзистор T1 (фиг.4) срабатывает и на входе порогового устройства (триггера Шмитта) появляется сигнал, под действием которого на выходе триггера Шмитта появляется сигнал, управляющий работой кольцевого счетчика. Под действием указанного сигнала в кольцевом счетчике срабатывает один из тиристоров, подключаемых через сопротивления и основную обмотку управления к источнику питания. Срабатывание каждого тиристора приводит к изменению тока управления в основной обмотке управления, что обеспечивает скачок частоты на выходе задающего генератора, при этом изменяется скачком и частота питания гиродвигателя. Это приводит к тому, что активная мощность, потребляемая гиродвигателем от преобразователя, начинает снова увеличиваться. Транзистор T1 (фиг.4) запирается, триггер Шмитта перебрасывается в исходное состояние до момента перехода точки максимума потребляемой активной мощности, после чего работа схемы повторяется и срабатывает очередной триггер кольцевого счетчика.
Задающий генератор (ЗГ) может быть построен несколько иным образом (фиг.5).
Здесь импульсы тактового генератора (1) через электронный ключ (2), управляемый напряжением схемы фиксации максимума, поступают на цифроаналоговый преобразователь (ЦАП) (3). ЦАП преобразует их в линейно возрастающий ток управления, который и обеспечивает возрастающий характер частоты синхронизации задающего генератора.
При включении системы, так же как и в предыдущем случае, задающий генератор при помощи обмотки смещения обеспечивает начальную частоту синхронизации. При достижении активной мощностью, потребляемой двигателем, максимума электронный ключ открывается и пропускает на ЦАП серию импульсов тактового генератора. ЦАП, представляющий собой триггерную линейку с системой транзисторных ключей вырабатывает определенное значение тока управления, которое изменяет частоту управляемого выходного генератора ЗГ. При изменении частоты на выходе генератора активная мощность, потребляемая двигателем, уже не будет соответствовать максимальной для данной частоты питания и электронный ключ блокирует выход тактового генератора. Частота на выходе ЗГ фиксируется до момента достижения потребляемой активной мощностью очередного максимума.
Среднее за время разгона значение вращающего момента двигателя будет тем ближе к максимальному значению при данном токе потребления, чем меньше по абсолютной величине значения скачков частоты питания при срабатывании датчика активной мощности.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО ЧАСТОТНОГО РАЗГОНА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1974 |
|
SU1840011A1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО ФОРСИРОВАННОГО РАЗГОНА ГИРОДВИГАТЕЛЕЙ | 1969 |
|
SU1840168A1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННОГО РАЗГОНА АСИНХРОННЫХ ГИРОДВИГАТЕЛЕЙ | 1972 |
|
SU1840124A2 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1973 |
|
SU1840121A2 |
| Частотно-управляемый асинхронный электропривод | 1980 |
|
SU951620A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ПЕРЕМЕННОГО ТОКА ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 2013 |
|
RU2554911C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1972 |
|
SU1840123A1 |
| Короткозамкнутый асинхронный электродвигатель | 1988 |
|
SU1638765A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |
Изобретение относится к электротехнике, а именно к способам форсированного частотного разгона асинхронных двигателей. Сущность: способ осуществляется путем ступенчатого изменения частоты до достижения гиродвигателем рабочей скорости и стабилизации тока. Кроме того, при каждом значении частоты измеряют активную мощность гиродвигателя. При достижении ее максимума производят скачкообразное увеличение частоты. Технический результат: сокращение времени разгона. 6 ил.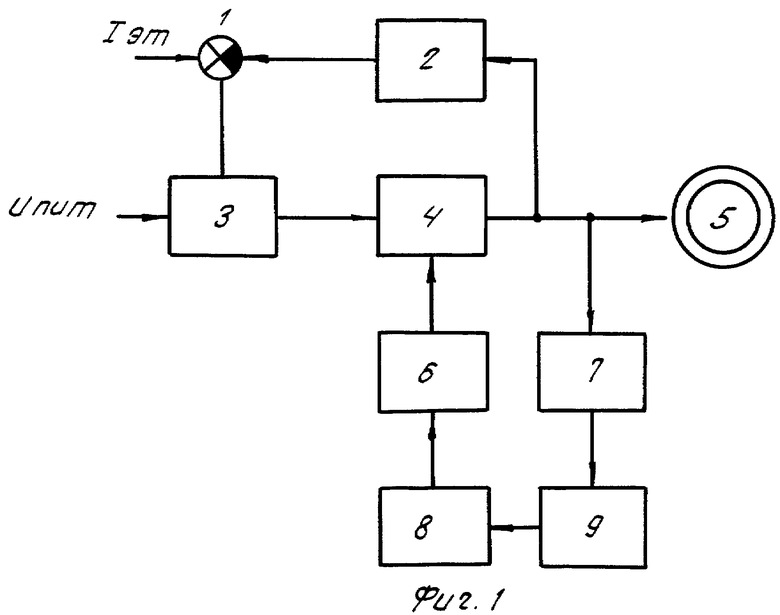
Способ разгона асинхронного гиродвигателя путем ступенчатого изменения частоты до достижения гиродвигателем рабочей скорости и стабилизации тока, отличающийся тем, что, с целью сокращения времени разгона, при каждом значении частоты измеряют активную мощность гиродвигателя и при достижении ею максимума производят скачкообразное увеличение частоты.

