Изобретение относится к ракетной технике, а именно к устройствам для дистанционного управления полетом ракет при помощи ИК-луча.
В настоящем изобретении усовершенствуется известное устройство, состоящее из источника ИК-излучения, двух растров, сканирующих по двум координатным осям с временным разделением изображение ИК-излучателя, и оптической системы, изображающей плоскость сканирования в пространство. Это устройство формирует поле управления в ИК-луче и устанавливается на пункте управления. На борту ракеты установлено приемное устройство, производящее выделение координат. Известное устройство нашло применение в отечественных комплексах "Лотос", "Гроза", в зарубежном комплексе "Тетон".
Известное устройство имеет ряд недостатков:
применение двух растров усложняет конструкцию прибора управления и, вследствие временного разделения сигналов по двум координатам, не позволяет в бортовой аппаратуре ракеты применить прямую демодуляцию широтно-импульсного сигнала. Эти недостатки в совокупности приводят к большим габаритам и весам аппаратуры пункта управления и к усложнению бортовой аппаратуры управления.
Целью настоящего изобретения является устранение указанных недостатков, т.е. разработка устройства, позволяющего закладывать в луч информацию одновременно о двух координатах при использовании одного растра в плоскости сканирования.
Поставленная цель достигается тем, что разработан специальный растр, задающий информацию одновременно по двум координатам в виде широтно-импульсного сигнала, а для независимой демодуляции сигнала в бортовой аппаратуре ракеты, источник ИК-излучения модулирован опорным сигналом, снимаемым с датчика, связанного с растром.
Сущность изобретения поясняется чертежами, где:
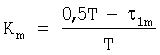
на фиг.1 схематически изображен растровый диск,
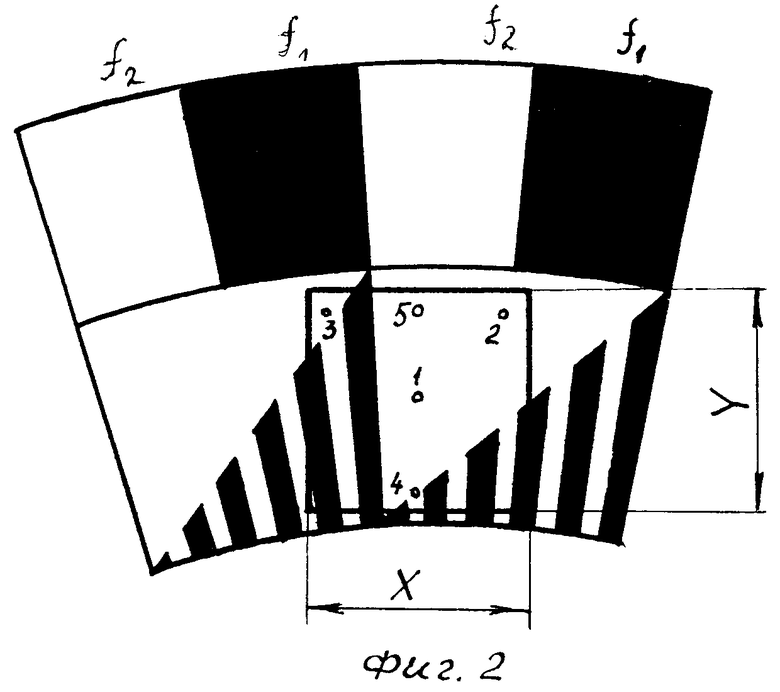
на фиг.2 изображены диафрагма сканируемого поля, два периода растра и пять положений ракеты в поле управления,
на фиг.3 показана структурная схема аппаратуры пункта управления,
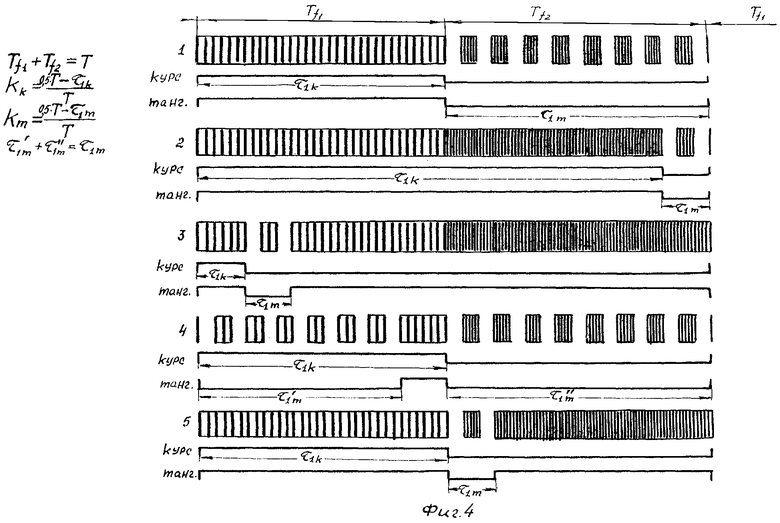
на фиг.4 приведен вид сигналов для положений ракеты, изображенных на фиг.2.
Предлагаемое устройство включает в себя (см. фиг.3) источник излучения 1, соединенный с датчиком опорного сигнала 2 через управляемый генератор 3 и модулятор 4. Излучатель 1 помещен в фокусе конденсора 5, передающего изображение излучателя 1 в плоскость растра 6 и диафрагмы 7; плоскость растра 6 помещена в фокальной плоскости оптической системы 8. Растр 6 выполнен в виде двух концентрических кольцевых рисунков, один из которых служит для сканирования в пределах диафрагмы 7 (см. фиг.2, 3), а второй служит для выработки сигнала опоры. Растр может быть выполнен, например, так, как изображено на фиг.1. Рисунок, предназначенный для сканирования, выполнен в виде периодической пилообразной структуры с длительностью периода, равной ширине сканируемого поля, а нейтраль (диагональ пилы) задается на растре радиальными рисками, длина которых равна высоте сканируемого поля в начале периода и линейно убывает до нуля к концу периода (см. фиг.1, 2). Рисунок, служащий для выработки опорного сигнала, состоит из прозрачных и непрозрачных полей, чередующихся с периодом, равным периоду растрового рисунка. В качестве излучателя 1 может быть применен излучатель с модуляцией по питанию (например, ксеноновая лампа, газовый или полупроводниковый ОКГ) и с внешней модуляцией (например, лампа накаливания, ОКГ на стекле с неодимом и др.). При применении излучателя с внешней модуляцией, модулятор помещается в ходе лучей после излучателя.
После включения устройства опорный сигнал с датчика 2, поступая на управляемый генератор 3, осуществляет частотную манипуляцию на частотах f1 (например, 15 Кгц) и f2 (например, 17 Кгц), а модулятор 4 осуществляет модуляцию потока излучателя 1 (см. фиг.3); модулированное излучение поступает в плоскость сканирования, ограниченную диафрагмой 7. На фиг.2 изображена диафрагма с размерами Х и У и два периода растрового рисунка, показаны пять положений ракеты в пределах поля управления. В момент начала сканирования каждым периодом растра происходит смена частоты излучения излучателя 1; при перемещении ракеты по оси У (вверх-вниз на фиг.2) будет изменяться (см. фиг.4) длительность τ1m модуляции излучения растром. Период сканирования Т, длительность τ1m и координата ракеты по оси У (тангажу) KT связаны следующим соотношением:
При перемещении ракеты по оси Х (влево-вправо на фиг.2) будет изменяться (см. фиг.4) фаза τ1к начала модуляции растром относительно начала излучения частоты f1.
Период сканирования Т, длительность τ1к и координата ракеты по оси Х (курсу) Кк связаны следующим соотношением:
Период  излучения частоты f1, период
излучения частоты f1, период  излучения частоты f2 и период сканирования Т связаны соотношением:
излучения частоты f2 и период сканирования Т связаны соотношением:
Вид сигналов, формируемых аппаратурой пункта управления, показан на фиг.4; сигналы соответствуют положениям ракеты, изображенным на фиг.2. Полученные в плоскости сканирования сигналы передаются оптической системой 8 в пространство управления, попадают на приемную аппаратуру ракеты, демодулируются и поступают на исполнительные органы ракеты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ТЕЛЕОРИЕНТИРОВАНИЯ РАКЕТЫ | 1973 |
|
SU1840063A1 |
| СПОСОБ НАВЕДЕНИЯ ПО ОПТИЧЕСКОМУ ЛУЧУ РАКЕТЫ, СТАРТУЮЩЕЙ С ПОДВИЖНОГО НОСИТЕЛЯ, И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2436033C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2382315C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПТИЧЕСКОГО ПОЛЯ ДЛЯ ТЕЛЕОРИЕНТИРОВАНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 1997 |
|
RU2123166C1 |
| СПОСОБ АМПЛИТУДНОЙ МОДУЛЯЦИИ ИМПУЛЬСНОГО ОПТИЧЕСКОГО ИЗЛУЧЕНИЯ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2300841C1 |
| УСТРОЙСТВО ДЛЯ ПРЯМОГО ЛАЗЕРНОГО ЭКСПОНИРОВАНИЯ | 2014 |
|
RU2567013C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2241195C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ФОРМИРОВАНИЯ ВИДЕОСИГНАЛА | 1998 |
|
RU2195694C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕОРИЕНТИРУЕМОЙ В ЛУЧЕ РАКЕТЫ И РАКЕТНЫЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2266509C1 |
Изобретение относится к ракетной технике и может быть использовано для управления полетом ракет при помощи инфракрасного луча. Техническим результатом является повышение точности передачи информации. В устройстве для дистанционного управления между сканирующей системой и источником излучения установлены последовательно соединенные датчик опорного напряжения, управляемый генератор и модулятор источника излучения. 4 ил.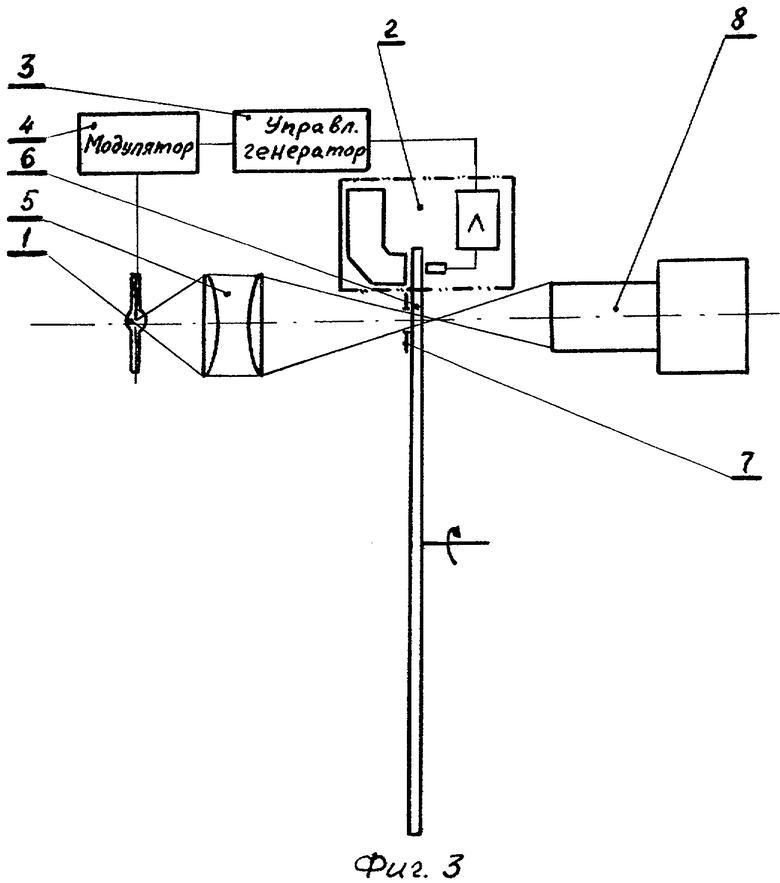
Устройство для дистанционного управления полетом ракеты, состоящее из источника излучения, сканирующей системы, выполненной в виде диска с двумя концентрическими кольцевыми непрозрачными рисунками оптической системы, приемной аппаратуры, включающей в себя приемник излучения и блок выделения координат, отличающееся тем, что, с целью повышения точности передачи информации, между сканирующей системой и источником излучения установлены последовательно соединенные датчик опорного напряжения, управляемый генератор и модулятор источника излучения.

