Предлагаемое изобретение относятся к области автоматического управления.
В частности, к управлению фазированными антенными решетками (ФАР).
Изобретение может быть использовано в радиотехнике, приборостроении и астрономии.
Задачу сопровождения целей рассматривал, например Г.Бениас "Автоматическое сопровождение плотных слоев групповых целей с помощью ЭВМ по данным РЛС с ФАР", материалы конференции ″Jnternational Conference Radar-77, October 1977, London″. Перевод №1854, УДК.621.396.96: 621.391.26, 1978 г. Однако в работе изложены лишь весьма общие соображения и в предположении, что ширина апертуры (сектора электронного сканирования луча) ФАР такова, что она не накладывает ограничения на сопровождение с помощью электронной вычислительной машины (ЭВМ).
В этой работе не рассматривается задача управления нормалью ФАР.
Точность сопровождения нормалью ФАР может быть повышена не путем повышения коэффициента усиления в разомкнутой системе, что сопряжено со снижением устойчивости замкнутой системы регулирования, а за счет применения скоростной компенсации ошибки, которая изложена в книге В.А.Бесекерского и др. Теория систем автоматического регулирования, М. Наука, 1975 г. стр.256, рис.9.12 и приводит к уменьшению динамических ошибок по скорости цели δск и ускорению δуск до величин
δск=0, 
Известна 3-х канальная система сопровождения двух воздушных объектов, прототип, изложенная в техописании изделия (Предприятие, 1980 г.).
Устройство-прототип представлено на фиг.1 и состоит из электронной следящей системы (1-й канал), электромеханической следящей системы управления нормалью ФАР (3-й канал), предназначенных для сопровождения одной воздушной цели, и из второй электронной следящей системы (2-й канал) сопровождения второй цели. По своему устройству 1 и 2-ой каналы идентичны. Один канал электронной системы сопровождения цели (ЭССЦ) состоит из последовательно соединенных: ФАР с узким сектором сканирования 1, формирователя сигнала ошибки (ВСО) 2, коммутатора сигналов ошибки от каждой из двух целей 3, экстраполятора цели 4, включающего два последовательно соединенных интегратора 5, 6, сумматора автономизирующей связи 7, коммутатора СУЛ8, системы управления лучом (СУЛ) 9. Выход СУЛ 9 присоединен к электронному входу управления фронтом волны ФАР1. Входом коммутатора 3 является объединение его входов 1, 4, при этом 2 и 3 соединены с общей шиной устройства. Для повышения устойчивости электронной следящей системы применяется связь, шунтирующая интегратор 1 5, на выходе которого (втором выходе экстраполятора 4) образуется сигнал, пропорциональный скорости цели. Особенность сопровождения цели с ФАР 1 та, что совместно с каналом 1 должен функционировать канал 3, состоящий из последовательно, соединенных: коммутатора 10 входных сигналов системы управления нормалью ФАР (СУН) входы которого соединены с выходами экстраполяторов 4 1-ой и 2-ой цели, устройства сравнения СУН-11, сумматора скоростной компенсации ошибки 12, электромеханического сервопривода 13, выход которого соединен с механическим входом ФАГ 1 и с преобразователем 14, выход которого соединен со вторыми входами сумматоров 7, 11. Скоростная компенсация со вторых выходов экстраполяторов 4 через коммутатор 15 и делитель 16 с положительным знаком поступает на второй вход сумматора 12.
Для реализации условия (1) величина делителя 16 выбирается, равной

где Кν - коэффициент усиления разомкнутой СУН
Т.к. Кν≥1 то К16<1, следовательно, узел 16 есть делитель.
Включение режима сопровождения "Две цели" производится нажатием кнопки SB1 пульта оператора 17, при этом срабатывает реле К1, блокируемое внешним сигналом ЕК и с первого выхода пульта 17 поступает командный сигнал на управляющий вход 4 коммутатора двух целей 18. Срабатывание коммутатора 18 соединяет генератор 19 тактовой частоты f0 с управляющими входами коммутаторов 3, 4. Выключение режима "Две цели" производится нажатием кнопки SВ2. Тумблер В1 предназначен для выработки на втором выходе пульта 17 команды "Опасная цель", которая поступает на управляющие входы 4 коммутаторов 10, 15 и нормально замкнутый вход коммутатора каналов 18. Срабатывание коммутаторов 10, 15 переключает входы СУН устройства сравнения 11, делителя 16 с управления от первой цели на управление от второй цели, отдавая тем самым приоритет 2-ой цели.
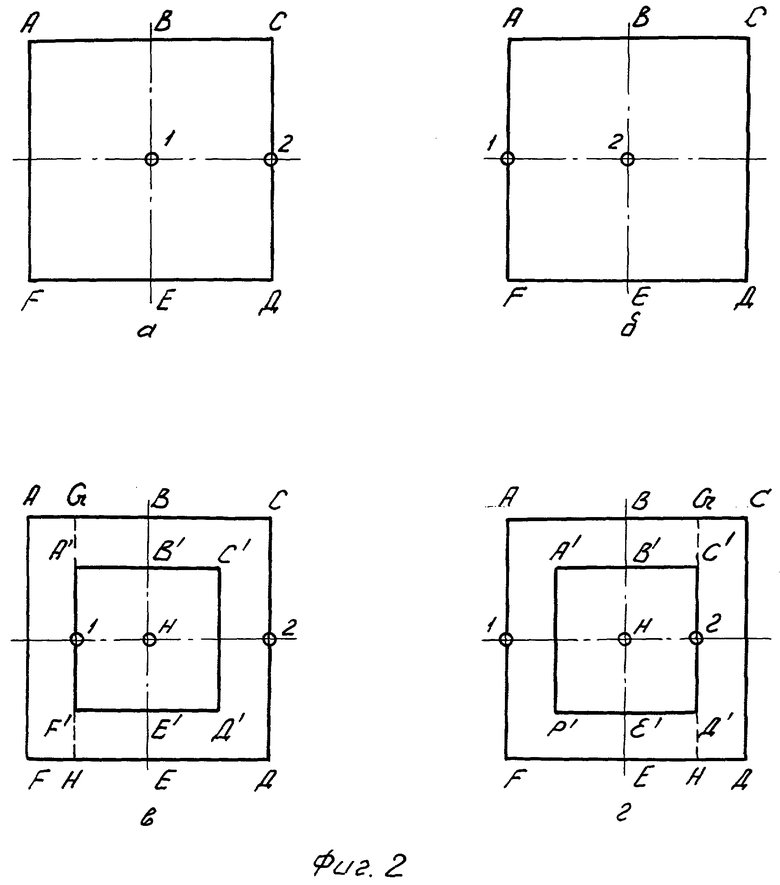
Фиг.2а иллюстрирует расположение 2-х целей в секторе АВСДЕF малоэлементной ФАР1 при включении SВ1, фиг 2б - включении SВ1 и B1. В первом случае направление нормали совпадает с направлением на цель 1, а цель 2 сопровождается 2-м каналом ЭССЦ. Во втором - приоритет отдан цели 2.
Другой важной особенностью устройства-прототипа является наличие в нем двух сумматоров 7 автономизирующих связей ЭССЦ 1-го и 2-го каналов. Действие автономизирующей связи заключается в том, что сигнал, сервопривода 13 с одной стороны перемещает по механическому входу нормаль ФАР 1 в определенном направлении, а с другой стороны через последовательно соединенные преобразователь 14, сумматор 7, коммутатор 8, СУЛ 9 перемещает луч в обратном направлении на тот же самый угол, т.е.
Формула (3) означает, что цель сопровождается одной из ЭССЦ без участия СУН, если цель находится в секторе сканирования ФАР и выполняется условие вычитания

где βСУН - угол нормали ФАР
βЭССЦ - угол цели
βСУЛ - угол отклонения луча от нормали ФАР
Дмакс - сторона квадрата сектора сканирования ФАР
Назначение СУН - поддержание условия (4),
На фиг.1 одноименные элементы 1-го и 2-го каналов ЭССЦ обозначены одноименными позициями. Сопровождение 2-х целей одной ФАР производится за счет импульсной (цифровой) работы ЭССЦ, осуществляемой коммутаторами 3, 8 которые с частотой тактового генератора 19 переключают сигналы ошибок и управляющие входные сигналы СУН, что возможно, поскольку экстраполяторы 4 обладают "памятью" по углу (выход 1) и по скорости (выход 2) цели.
Однако недостатком устройства-прототипа является малый диапазон углов сопровождения 2-х целей с помощью малоэлементной ФАР. Действительно из фиг.2а и фиг 2б следует, что половина сектора сканирования ФАР соответственно ABEF и ВСДЕ не используются при сопровождении целей, поскольку при увеличении угла между целями большем, чем АВ (ВС) оператор включением SВ2 должен перевести устройство на сопровождение одной цели.
Другой недостаток устройства прототипа заключается в том, что оператором с помощью пульта 17 фактически выполняются функции анализатора целей, используя только внешнюю информацию, а также априорные данные и не используется имеющаяся точная информация о состоянии сопровождения 2-х целей в самом устройстве-прототипе, которой во внешних системах (в комплексе 9А330) нет. Иными словами отсутствие анализатора целей снижает возможности сопровождения маневрирующих целей, т.е. таких целей, разность углов визирования которых (координат целей) изменяется во времени.
Фиг.2 "Сектор сканирования малоэлементной ФАР с расположенными в нем сопровождаемыми целями 1, 2" Фиг.а, б - для прототипа, фиг.2в, г - предлагаемого устройства.
Фиг.3 ″Блок-схема 3-х канальной системы сопровождения двух целей с приоритетом к одной из них ("предлагаемое устройство"). На чертежах и в тексте приняты следующие обозначения:
1. Малоэлементная ФАР (ФАР с узким сектором сканирования) имеющая электронный и механический входы управления лучом.
2. Формирователь сигнала ошибки электронных систем сопровождения цели (ВСО).
3. Коммутатор на два направления сигналов ошибки содержащий:
- 1, 3. Первый, третий нормально замкнутые НЗ/входы,
- 2, 4. Второй, четвертый нормально разомкнутые (HP) входы,
- 1, 2. Первый, второй выходы.
4. Экстраполятор координаты (угла) и первой производной координаты (скорости) цели, выходы его есть:
- 1. Координата (угол) цели,
- 2. Скорость цели.
5. Интегратор I экстраполятора 4.
6. Интегратор II экстраполятора 4.
7. Сумматор автономизирующей связи, содержащий:
- 1. Вход угла цели со знаком ″+″,
- 2. Вход угла сервопривода со знаком ″-″.
8, 10, 15 и 18. Коммутаторы СУЛ, угла СУН, скорости СУН и каналов содержащие:
- 1 - НЗ вход,
- 2 - HP вход,
- 3 - выход,
- 4 - управляющий вход.
9. Система управления лучом ФАР (СУЛ).
11. Устройство сравнения координат системы управления нормалью (СУН).
12. Сумматор скорости цели со знаками "+".
13. Сервопривод электромеханический.
14. Преобразователь "Вал-электрический сигнал".
16. Делитель.
17. Пульт оператора содержащий:
органы формирования команд
- SВ1. Две цели,
- SВ2. Одна цель,
- B1. Опасная цель,
- Л1. Л2. Индикаторы приоритета,
К1. Реле выходы блокировки,
Выходы
- 1. Командный сигнал "Две цели",
- 2. Командный сигнал "Опасная цель".
19. Генератор тактовой частоты f0 коммутации каналов ЭССЦ.
20. Блок наведения нормали ФАР, содержащий:
- 21. Коммутатор приоритета, аналогичный 3,
- 22. Первый делитель, равный λ,
- 23. Сумматор координат 1-ой и 2-й целей,
- 24. Второй делитель, равный  ;
;
- 25. Коммутатор включения двух целей аналогичный 18,
- 1, 2 входы координат целей
- 3 и 4 управляющие входы изменения приоритета и включения двух целей.
- Выход блока (линейный выход).
26. Анализатор целей, содержащий:
- 27. Коммутатор углов βСУЛ, первой и второй целей при изменении их приоритета (первый коммутатор),
- 28. Панель выделения модуля (ПВМ),
- 29. Компаратор,
- 30. Детектор,
- 31. Фильтр нижних частот,
- 32. Панель порога разрешения (ППР),
- 33. Коммутатор блокировки командного сигнала "Две цели", аналогичный 18 (второй коммутатор),
- 1. Вход угла β СУЛ первой цели,
- 2. Вход угла β СУЛ второй цели,
- 3. Управляющий вход (вход коммутатора 27),
- Выход блока (блокировочный выход).
Предлагаемое устройство содержит малоэлементную ФАР1, выход которой через последовательно соединенные ВСО2 и коммутатор на два направления 3 соединен со входами экстраполяторов 4 1-го и 2-го каналов ЭССЦ, первые выходы которых через сумматоры 7 соединены с первым и вторым входами коммутатора СУЛ8, выход которого соединен с электронным входом ФАР1. Первые выходы экстраполяторов 4 также соединены с первым и вторым входами первого блока наведения, выход которого соединен с устройством сравнения координат 11, и через сумматор скорости 12 - с сервоприводом 13, выход которого соединен с входом преобразователя 14 и с механическим входом ФАР1. Выход преобразователя 14 соединен со вторыми входами сумматоров 7 и устройства сравнения 11, образуя тем самым главную отрицательную обратную связь системы управления нормалью (СУН). Вторые выходы экстраполяторов 4 аналогично первым его выходам через второй блок наведения соединены через делитель 16 со вторым входом сумматора 12. При этом первый и второй входы блоков 20 соединены с 1,4 и 2,3 входами коммутатора 21, первый и второй выходы которого соединены соответственно со вторым входом сумматора 23, с первым входом коммутатора 25 и со входом первого делителя 22, выход которого, через сумматор 23 и второй делитель 24, - со вторым входом коммутатора 25, выход которого - выход блока 20; третий и четвертый входы блока 20 являются управляющими входами коммутаторов 21 и 25, они соединены соответственно с первым выходом блока 17, первым входом коммутатора 18, с третьим входом анализатора 26, третьим входом 2-го блока 20 и с управляющим входом коммутатора 18, четвертым входом второго блока 20, вторым выходом блока 17.
Таким образом, первый блок 20 реализует операцию

второй блок

Если уравнения движения маневрирующих целей есть
β1=a1t2+b1t+с1
то несложно показать, что при введении второго блока 20 для формирования сигнала Uк с последующей подачей его через делитель 16 на сумматор скорости 12 нормаль ФАР будет поддерживаться между целями по уравнению (5) с точностью определяемой равенствами (1). Т.е. применение 2-го блока 20 - оптимальное решение.
Анализатор 26 своими входами 1, 2 соединен с выходами сумматоров 7, а блокировочным выходом со вторым выходом пульта 17. При этом первый и второй входы анализатора соединены с входами коммутатора 27, выход которого через последовательную цепь узлов 28, 29, 30, 31, 32, 33 соединен с его выходом, а третий вход является управляющим входом коммутатора 27.
Узлы анализатора реализуют следующие операции над сигналами:
ПВМ 28 - 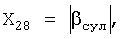 где Х28 - выход ПВМ
где Х28 - выход ПВМ
Компаратор 29 - 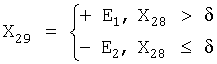
где δ - уровень срабатывания, эквивалентный 
Детектор 30 - 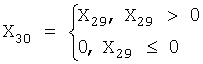
ФНЧ 31 - 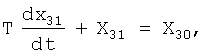 где
где
Т - постоянная времени ФНЧ
ППР 32 - 
где Uпорога - напряжение срабатывания ППР.
Узлы: ПВМ, компаратор ФНЧ, ППР реализуются на операционных усилителях и реле, а детектор на диоде (В.Л.Шило. Линейные интегральные схемы в радиоэлектронной аппаратуре, Сов. радио., М., 1979).
Анализатор 26 решает условие (4), обеспечивая тем самым работу по маневрирующим 2-м целям при одновременной вероятности несрыва сопровождения одной цели (при выходе 2-ой цели из сектора Dмакс) такой же, как и вероятность сопровождения одно-целевого Р.Л. комплекса. Панель выделения модуля (28), компаратор 29 анализатора совместно с детектором 30 решают неравенство (4). Постоянная времени фильтра нижних частот выбирается исходя из условия Т2>Т>Тпер, где Т2 - время "памяти" экстраполятора 4, Тпер - время переходного процесса СУН. Панель порога разрешения 32 предназначена для выработки сигнала четкого срабатывания коммутатора 33, исключающего гистерезис.
Выбор параметра λ зависит от максимальных динамических характеристик СУН, минимально допустимого уменьшения отношения сигнал: шум при отклонении луча ФАР от нормали и т.п. В предлагаемом устройстве путем моделирования установлен параметр λ=0,6. Заметим, что при λ=0 получаем устройство-прототип, если λ=1, то нормаль располагается посередине между 2-мя целями.
Устройство работает следующим образом. При нажатии кнопки SВ1 пульта 17 на его первом выходе вырабатывается командный сигнал "Две цели". При этом срабатывает коммутатор каналов 18, подключая генератор 19 к управляющим входам коммутаторов 3, 8 и луч ФАР1 с помощью СУЛ 9 устанавливается циклически с частотой f0 то на 1-ю, то на 2-ю цель и ВСО-2 вырабатывает ошибки сопровождения ЭССЦ упомянутых целей, которые с помощью экстраполяторов 4 сводятся до минимальных величин и в конечном счете на первых и вторых выходах экстраполяторов 4 образуются координаты и производные координат каждой цели. Одновременно с коммутатором 18 срабатывают коммутаторы 25 блоков 20, на выходах которых образуются координата движения нормали и ее первая производная. Координата поступает на устройство сравнения 11, вырабатывающее ошибку СУН и сервопривод 13 устанавливает нормаль ФАР1 между 1 и 2 целями, отдавая приоритет 1-ой цели, как показано на фиг.2, в, а первая производная с выхода второго блока 20 поступает через делитель 16 на сумматор 12, уменьшая тем самым ошибку СУН до минимальной величины. При этом на выходе первого сумматора 7 образуется угол βСУЛ отклонения от нормали луча 2-ой (неприоритетной) цели, величина которого непрерывно контролируется анализатором 26 и если она превышает угол Dмакс/2, то срабатывает коммутатор 33 анализатора и с его выхода снимается блокировочный сигнал, благодаря чему отпускает реле пульта 17 и с его выхода снимается командный сигнал ″Две цели″, отпускают коммутаторы 3, 8, 18, 21, 25 и нормаль устанавливается в направлении на 1-ю цель. Аналогичный эффект достигается при нажатии кнопки SВ2 "Одна цель". Если же этих двух событий не произошло и оператор включил тумблер В1 по причине, например, принятия решения обстрела 2-ой цели (вместо 1-й), то на втором выходе пульта 17 вырабатывается командный сигнал "Опасная цель", срабатывают коммутаторы 21 блоков 20, 27 блока 26 и нормаль приближается ближе ко 2-ой цели, отдавая тем самым ей приоритет как показано на фиг.2 г, а анализатор контролирует 1-ю цель.
Использование изобретения позволит расширить диапазон углов сопровождения маневрирующих целей с помощью малоэлементной ФАР без срыва сопровождения.
Графически это определяется увеличением поля сопровождения на величину, определяемую квадратом BEHG (BGHE) фиг.2 в, г.
Аналитически расширение диапазона δ углов определяется формулой

где: диапазон устройства прототипа
диапазон предлагаемого устройства

Соответственно расширяется и диапазон расстояний δS между маневрирующими целями без срыва сопровождения

Для предлагаемого устройств расширение диапазона равно
δβ=δS=λ·100=0,6·100=60%
Кроме того, расширяется зона сопровождения Р.Л комплекса за счет приближения ближней границы (БГ) целей:
БГ прототипа рассматриваемого устройства
БГ предлагаемого устройства

где S°=150 м - максимальное расстояние между целями "сомкнутого строя"
Расширение зоны составляет

Для предлагаемого устройства

По данному техническому предложению на предприятии проведено на ЭВМ ″PRIME″ моделирование предлагаемого устройства при сопровождении двух целей. При этом установлено, что время переходного процесса при смене приоритета цели составило Тпер=0,7 с, блок анализатора четко переключал следящую систему с сопровождения двух целей на сопровождение одной цели. Потери одной (приоритетной) цели при выходе второй (неприоритетной) цели за пределы сектора сканирования Dмакс=10° не наблюдалось. Скорость цели была принята V=600 м/с, параметр Р=1000 м. Цели при моделировании или "сомкнутым строем".
Использование устройства предполагается при модернизации заказа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2329454C2 |
| ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА С ДВУМЯ НЕЗАВИСИМЫМИ ЛУЧАМИ И УПРАВЛЯЕМОЙ ПОЛЯРИЗАЦИЕЙ В СУММАРНОМ ЛУЧЕ (ВАРИАНТЫ) | 2004 |
|
RU2282288C2 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2013 |
|
RU2548682C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВОЙСКОВОГО ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА БЛИЖНЕГО ДЕЙСТВИЯ | 1985 |
|
RU2102772C1 |
| Адаптивный анализатор спектра | 1979 |
|
SU883767A2 |
| Двухотсчетный следящий привод | 1989 |
|
SU1700535A1 |
| Устройство прогнозирования работоспособности радиоэлектронной аппаратуры | 1987 |
|
SU1422196A2 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |

Изобретение относится к области автоматического управления, в частности - к управлению фазированными антенными решетками, и может быть использовано в радиотехнике, приборостроении и астрономии. Технический результат, на достижение которого направлено данное изобретение, состоит в расширении диапазонов углов сопровождения маневрирующих целей. Данный технический результат достигается введением в устройство, состоящее из первого и второго электронных каналов ЭССЦ, механического канала СУН, пульта оператора, генератора тактовой частоты и коммутаторов каналов ЭССЦ, дополнительно введены два блока наведения нормали ФАР и анализатор целей, благодаря чему нормаль ФАР поддерживается в направлении между направлениями на цели так, что следы этих направлений (1, Н, 2) на перпендикулярной им плоскости располагаются на одной прямой в отношении  , где 0<λ<1. При этом для обеспечения работы устройства по маневрирующим целям предусмотрено изменение приоритета целей и автоматический переход на сопровождение одной (приоритетной) цели при выходе второй (неприоритетной) цели за пределы сектора сканирования Dмакс. 3 ил.
, где 0<λ<1. При этом для обеспечения работы устройства по маневрирующим целям предусмотрено изменение приоритета целей и автоматический переход на сопровождение одной (приоритетной) цели при выходе второй (неприоритетной) цели за пределы сектора сканирования Dмакс. 3 ил.
Устройство сопровождения целей по направлению, содержащее последовательно соединенные фазированную антенную решетку с узким сектором сканирования и блок выделения сигнала ошибки, первый и второй переключатели, последовательно соединенные первый интегратор, первый сумматор, второй интегратор, первый блок вычитания, третий переключатель и блок управления лучом, выход которого соединен с первым управляющим входом фазированной антенной решетки, последовательно соединенные третий интегратор, второй сумматор, четвертый интегратор и второй блок вычитания, выход которого соединен с вторым входом третьего переключателя, последовательно соединенные блок сравнения, третий сумматор и привод, выход которого соединен с вторым управляющим входом фазированной антенной решетки, делитель напряжения, выход которого соединен с вторым входом третьего сумматора, преобразователь вал-напряжение, включенный между выходом привода и вторыми входами первого блока вычитания, второго блока вычитания и блока сравнения, генератор тактовых импульсов, четвертый переключатель, выход которого соединен с управляющими входами первого, второго и третьего переключателей, элемент ИЛИ, пятый и шестой переключатели, источник сигнала "1" и источник сигнала "0", выход которого соединен с вторым входом первого переключателя, с первым входом второго переключателя, с вторым входом пятого переключателя и с первым входом шестого переключателя, причем выход блока выделения сигнала ошибки соединен с первым входом первого переключателя, выход которого соединен с входом первого интегратора и вторым входом первого сумматора, и с вторым входом второго переключателя, выход которого соединен с входом третьего интегратора и вторым входом второго сумматора, первый вход четвертого переключателя является входом команды "изменение приоритета целей" устройства сопровождения целей по направлению, а второй вход четвертого переключателя соединен с выходом генератора тактовых импульсов, первый вход элемента ИЛИ и управляющий вход пятого переключателя являются входами команд "две цели" и "одна цель" устройства сопровождения целей по направлению, выход элемента ИЛИ соединен с первым входом пятого переключателя, выход которого соединен с управляющим входом шестого переключателя, выход которого соединен с вторым входом элемента ИЛИ, отличающееся тем, что, с целью расширения диапазона углов сопровождения маневрирующих целей введены седьмой, восьмой, девятый, десятый, одиннадцатый и двенадцатый переключатели, последовательно соединенные первый делитель напряжения на К, четвертый сумматор и первый делитель напряжения на ( ), выход которого соединен с вторым входом девятого переключателя, последовательно соединенные второй делитель напряжения на К, пятый сумматор и второй делитель напряжения на (K+1), выход которого соединен с вторым входом двенадцатого переключателя, последовательно соединенные тринадцатый переключатель, блок определения модуля, компаратор, детектор, фильтр нижних частот и пороговый блок, а также четырнадцатый переключатель, управляющий вход которого соединен с выходом порогового блока, а первый и второй входы с выходами источников сигналов "1" и "0", причем выход второго интегратора соединен с первым входом седьмого переключателя, выход которого соединен с вторым входом четвертого сумматора и первым входом девятого переключателя, и с вторым входом восьмого переключателя, выход которого соединен с входом первого делителя напряжения на К, выход четвертого интегратора соединен с вторым входом седьмого переключателя и с первым входом восьмого переключателя, выход первого интегратора соединен с первым входом девятого переключателя, выход которого соединен с вторым входом пятого сумматора и первым входом двенадцатого переключателя, и с вторым входом одиннадцатого переключателя, выход которого соединен с входом второго делителя напряжения на К, выход третьего интегратора соединен с вторым входом десятого переключателя, и с первым входом одиннадцатого переключателя, выходы девятого и двенадцатого переключателей соединены с первым входом блока сравнения, и с входом делителя напряжения, выходы первого и второго блоков вычитания соединены соответственно с вторым и первым входами тринадцатого переключателя, выход четырнадцатого переключателя соединен с вторым входом шестого переключателя, управляющие входы седьмого, восьмого, десятого, одиннадцатого и тринадцатого переключателей соединены с первым входом четвертого переключателя, выход пятого переключателя соединен с управляющими входами четвертого, девятого двенадцатые переключателей.
), выход которого соединен с вторым входом девятого переключателя, последовательно соединенные второй делитель напряжения на К, пятый сумматор и второй делитель напряжения на (K+1), выход которого соединен с вторым входом двенадцатого переключателя, последовательно соединенные тринадцатый переключатель, блок определения модуля, компаратор, детектор, фильтр нижних частот и пороговый блок, а также четырнадцатый переключатель, управляющий вход которого соединен с выходом порогового блока, а первый и второй входы с выходами источников сигналов "1" и "0", причем выход второго интегратора соединен с первым входом седьмого переключателя, выход которого соединен с вторым входом четвертого сумматора и первым входом девятого переключателя, и с вторым входом восьмого переключателя, выход которого соединен с входом первого делителя напряжения на К, выход четвертого интегратора соединен с вторым входом седьмого переключателя и с первым входом восьмого переключателя, выход первого интегратора соединен с первым входом девятого переключателя, выход которого соединен с вторым входом пятого сумматора и первым входом двенадцатого переключателя, и с вторым входом одиннадцатого переключателя, выход которого соединен с входом второго делителя напряжения на К, выход третьего интегратора соединен с вторым входом десятого переключателя, и с первым входом одиннадцатого переключателя, выходы девятого и двенадцатого переключателей соединены с первым входом блока сравнения, и с входом делителя напряжения, выходы первого и второго блоков вычитания соединены соответственно с вторым и первым входами тринадцатого переключателя, выход четырнадцатого переключателя соединен с вторым входом шестого переключателя, управляющие входы седьмого, восьмого, десятого, одиннадцатого и тринадцатого переключателей соединены с первым входом четвертого переключателя, выход пятого переключателя соединен с управляющими входами четвертого, девятого двенадцатые переключателей.
| Техническое описание изделия, 1980. |

