Изобретение относится к области радиолокации и может быть использовано для обнаружения траекторий скоростных и интенсивно маневрирующих целей с помощью мобильных радиолокационных станций (РЛС) кругового обзора с антенной, выполненной в виде фазированной антенной решетки (ФАР), осуществляющей обзор зоны лучом, последовательно перемещаемым по углу места с помощью электронного управления, а по азимуту - с помощью механического вращения антенны.
Известен способ обнаружения и сопровождения траектории цели, включающий обнаружение цели в процессе кругового обзора зоны РЛС, обнаружение и сопровождение траектории цели в стробах обнаружения и подтверждения траектории (Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей. - М.: Радио и связь, 1993, с.26-28).
Недостатком известного способа является значительное увеличение размеров стробов обнаружения и сопровождения траекторий скоростных и интенсивно маневрирующих объектов, являющееся следствием характерного для обзорных РЛС большого периода обновления информации (10-15 с). Увеличение размеров стробов приводит к увеличению затрат временных и энергетических ресурсов, требуемых на осмотр стробов, а также к увеличению количества ложных траекторий. В результате происходит перегрузка системы обработки радиолокационной информации, уменьшается пропускная способность РЛС.
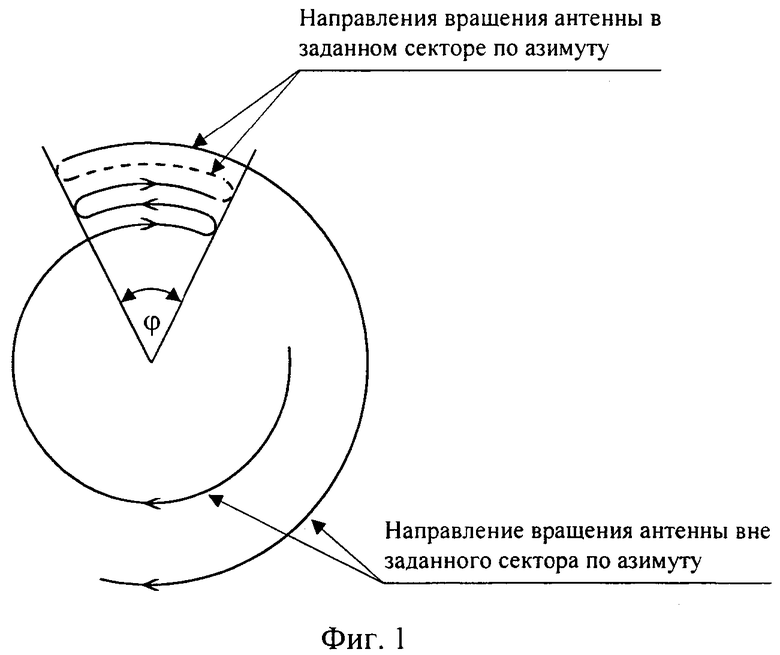
Наиболее близким способом является (фиг.1) способ обнаружения и сопровождения траектории цели в заданном секторе по азимуту размером φ с помощью РЛС кругового обзора с антенной, выполненной в виде фазированной антенной решетки, осуществляющей обзор зоны лучом, последовательно перемещаемым по углу места с помощью электронного управления, а по азимуту - с помощью механического вращения антенны, при этом после каждого осмотра упомянутого сектора изменяют направление вращения антенны, после очередного осмотра упомянутого сектора, при котором решение об обнаружении или об отсутствии обнаружения траектории цели принято, осмотр упомянутого сектора прекращают и продолжают круговой обзор зоны РЛС (патент РФ №2347236).
Наиболее близкий способ имеет следующие недостатки.
Для получения достаточно малого периода обновления информации в заданном секторе по азимуту в наиболее близком способе требуется быстрое изменение положения антенны в этом секторе с изменением направления вращения. В мобильных обзорных РЛС, антенны которых имеют значительную массу (более тонны), такие движения антенны неизбежно будут сопровождаться существенными динамическими нагрузками на привод антенны и саму антенну и могут явиться причиной деформации конструкции антенны и, как следствие, изменения ее характеристик. Таким образом, в РЛС с антеннами, имеющими значительную массу, применение наиболее близкого способа для обнаружения и сопровождения траекторий скоростных и интенсивно маневрирующих целей может оказаться весьма проблематичным.
Решаемой задачей (техническим результатом), таким образом, является обнаружение и сопровождение траекторий скоростных и интенсивно маневрирующих целей с достаточно малым периодом обновления информации в заданном секторе по азимуту с помощью РЛС кругового обзора с антенной, выполненной в виде ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту, имеющей значительную массу.
Указанный результат достигается тем, что в способе обнаружения и сопровождения траектории цели в заданном секторе по азимуту размером φ с помощью радиолокационной станции кругового обзора с антенной, выполненной в виде фазированной антенной решетки, осуществляющей обзор зоны лучом, последовательно перемещаемым по углу места с помощью электронного управления, а по азимуту - с помощью механического вращения антенны, согласно изобретению при положении луча в упомянутом секторе антенну вращают с заданной скоростью ω, определяемой исходя из времени, требуемого на осмотр этого сектора, после выхода луча из упомянутого сектора антенну вращают с ускорением α, задаваемым исходя из возможностей привода антенны и ее механической прочности, при этом
если при движении луча по азимуту к середине области вне заданного сектора по азимуту скорость вращения антенны не достигает значения максимальной допустимой скорости вращения антенны ωмакс, задаваемой также исходя из возможностей привода антенны и ее механической прочности, то при положении луча по азимуту далее середины упомянутой области вращение антенны замедляют с замедлением -α до достижения скорости вращения ω,
если при движении луча по азимуту к середине области вне заданного сектора по азимуту при каком-либо положении луча по азимуту φi скорость вращения антенны достигает значения ωмакс, то далее антенну продолжают вращать с этой скоростью ωмакс в пределах угла по азимуту, определяемого из выражения: 
Суть заявляемого способа заключается в следующем.
Снижение динамических нагрузок на привод антенны и на антенну в заявляемом способе обеспечивается за счет того, что заданный сектор по азимуту размером φ и область вне этого сектора осматриваются при неизменном направлении вращения антенны и без остановки ее вращения.
Скорость вращения антенны ω в пределах заданного сектора по азимуту постоянна, она определяется исходя из затрат времени на осмотр этого сектора при обнаружении и сопровождении траекторий целей.
Достаточно малый период обновления информации в заданном секторе по азимуту обеспечивается за счет максимально быстрого прохождения лучом области по азимуту вне этого сектора. При этом ускорение вращения антенны α и максимальная допустимая скорость вращения антенны ωмакс в этой области задаются исходя из возможностей привода антенны и ее механической прочности.
После выхода луча из заданного сектора по азимуту антенну вращают с ускорением α, далее область вне заданного сектора по азимуту может быть пройдена лучом антенны по одному из двух вариантов.
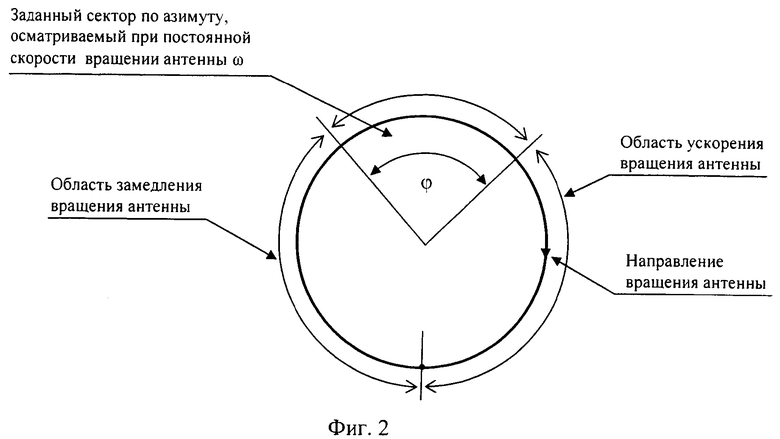
Первый вариант (фиг.2) реализуется, когда при движении луча к середине области вне заданного сектора по азимуту скорость вращения антенны не достигает значения максимальной допустимой скорости вращения антенны ωмакс. В этом случае при положении луча по азимуту далее середины упомянутой области вращение антенны замедляют с замедлением -α до достижения скорости вращения ω. После замедления вращения антенны луч оказывается в начале заданного сектора по азимуту.
Период обновления информации в заданном секторе по азимуту в этом случае определяется по формуле:

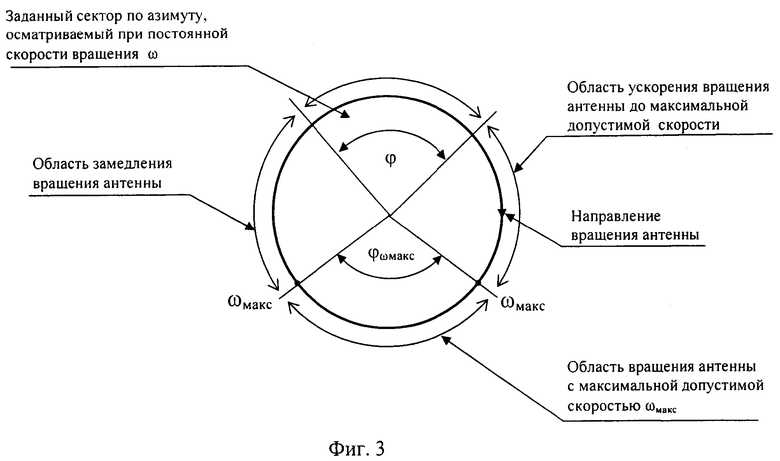
Второй вариант (фиг.3) реализуется, когда при движении луча к середине области вне заданного сектора по азимуту при каком-либо положении луча по азимуту φi скорость вращения антенны достигает значения ωмакс. В этом случае при следующих положениях луча в пределах угла по азимуту, определяемого из выражения:

антенну продолжают вращать с этой скоростью ωмакс, затем вращение антенны замедляют с замедлением -α до достижения к началу упомянутого сектора скорости вращения ω. После замедления вращения антенны луч оказывается в начале заданного сектора по азимуту.
Период обновления информации в заданном секторе по азимуту в этом случае определяется по формуле:

С точки зрения наименьшего периода обновления информации в заданном секторе по азимуту первый вариант предпочтительнее, поскольку в этом случае время прохождения области вне сектора меньше. Выбор варианта осуществляется в зависимости от значений φ, α, ω, ωмакс.
Таким образом, обеспечивается обнаружение и сопровождение траекторий скоростных и интенсивно маневрирующих целей с достаточно малым периодом обновления информации в заданном секторе по азимуту с помощью РЛС кругового обзора с антенной, выполненной в виде ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту, имеющей значительную массу, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - направления вращения антенны в наиболее близком способе.
Фиг.2 - расположение областей равномерного, ускоренного и замедленного вращения антенны в первом варианте прохождения лучом зоны обзора РЛС.
Фиг.3 - расположение областей равномерного, ускоренного и замедленного вращения антенны во втором варианте прохождения лучом зоны обзора РЛС.
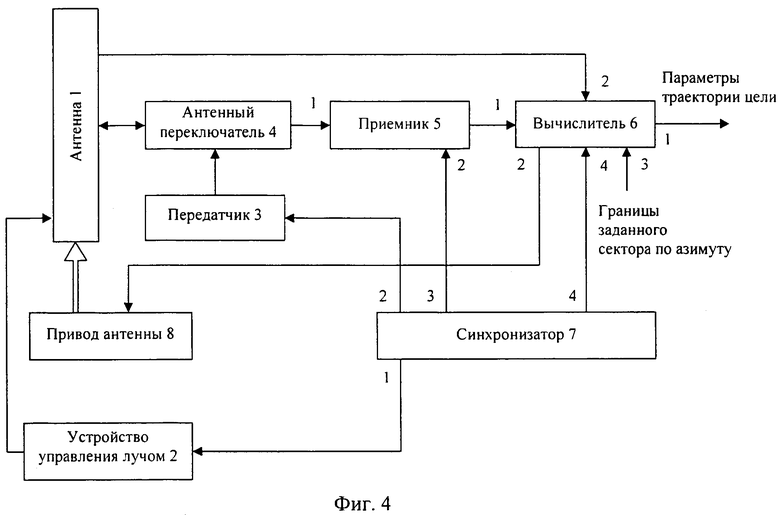
Фиг.4 - блок-схема РЛС, реализующей заявляемый способ (двойной стрелкой обозначена механическая связь).
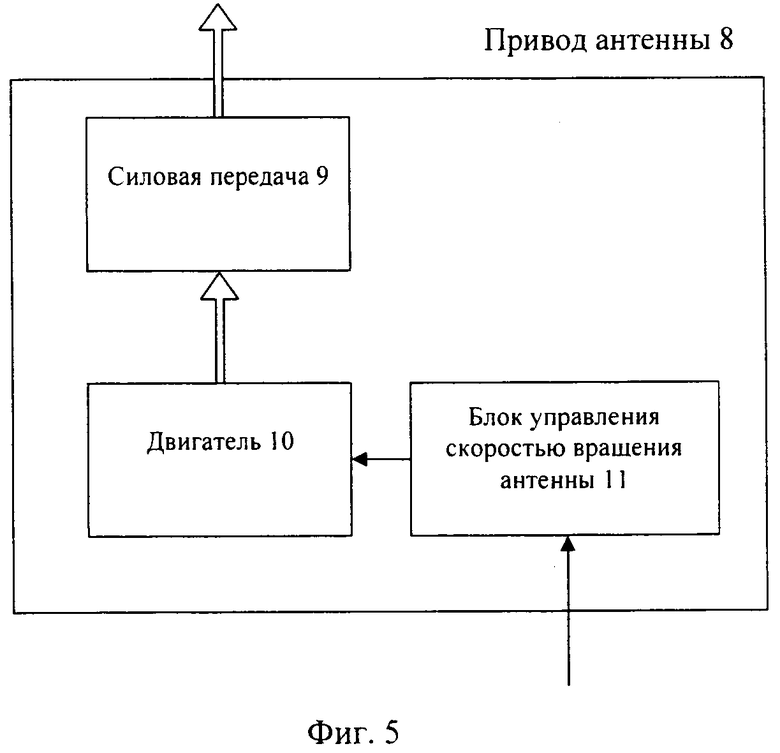
Фиг.5 - блок-схема привода антенны 8.
РЛС, реализующая заявляемый способ (фиг.4), содержит антенну 1, устройство управления лучом 2, выход которого соединен с управляющим входом антенны 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, выполняющий операции обнаружения траекторий целей и управления скоростью вращения антенны 1, первый выход которого является выходом РЛС, а также синхронизатор 7 и привод антенны 8, механически соединенный с антенной 1, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, второй выход вычислителя 6, являющийся выходом сигнала, пропорционального величине скорости вращения антенны 1, соединен со входом привода антенны 8, на третий вход вычислителя 6 подаются координаты границ заданного сектора по азимуту, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с четвертым входом вычислителя 6.
Привод антенны 8 (фиг.5) состоит из силовой передачи 9, двигателя 10 и блока управления скоростью вращения антенны 11, при этом вал двигателя 10 механически соединен со входом силовой передачи 9, которая, в свою очередь, механически соединена с антенной 1, а электрический вход двигателя 10 соединен с выходом блока управления скоростью вращения антенны 11, вход которого является входом сигнала, поступающего со второго выхода вычислителя 6 и управляющего скоростью вращения антенны 1.
РЛС, реализующая заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Антенна 1 - ФАР с одномерным электронным управлением лучом по углу места и механическим вращением по азимуту (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М. Сколника, т.2. - М.: Сов. радио, 1977, с.141-143).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с.166-168).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне, выполнен на основе известного передатчика (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с.278-279, рис.7.2).
Приемник 5 - супергетеродинный приемник, выполнен на основе известного приемника (A.M. Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В. Дружинина. - М.: Военное издательство МО, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный алгоритм обнаружения траектории цели (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. - М.: Сов. радио, 1974, с.285-287), вычисляются моменты начала ускорения и торможения вращения антенны вне заданного сектора по азимуту исходя из заданных значений φ, α, ω, ωмакс.
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с.602-603).
Привод антенны 8 - привод (Российский энциклопедический словарь, кн.2. - М.: Большая Российская Энциклопедия, 2000, с.1248).
Силовая передача 9 - редуктор (Типугин В.Н., Вейцель В.А. Радиоуправление. - М.: Сов. радио, 1962, с.578).
Двигатель 10 - машина постоянного тока (Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2. - М.: Высшая школа, 1987, с.195-203).
Блок управления скоростью вращения антенны 11 - блок управления скоростью вращения вала двигателя. Методы управления скоростью вращения вала двигателя описаны в источнике: Брускин Д.Э., Зорохович А.Е., Хвостов B.C. Электрические машины, ч.2. - М.: Высшая школа, 1987, с.281-287.
Рассмотрим работу РЛС, реализующей заявляемый способ.
По сигналам устройства управления лучом 2 осуществляется электронное перемещение луча антенны 1 по углу места, а за счет вращения антенны 1 происходит его перемещение по азимуту. При этом на вход передатчика 3 по командам синхронизатора 7 поступают импульсы запуска, обеспечивающие излучение зондирующего сигнала в последовательно осматриваемые направления. Период обновления информации первоначально равен периоду кругового обзора зоны.
Отраженный от цели сигнал через антенну 1 и антенный переключатель 4 поступает в приемник 5, где преобразуется на промежуточную частоту, фильтруется, усиливается. На второй вход вычислителя 6 с координатного выхода антенны 1 поступают координаты луча антенны, а с выхода приемника 5 - отфильтрованный и усиленный сигнал. В вычислителе 6 принятый сигнал сравнивается с порогом обнаружения, при превышении которого принимается решение об обнаружении цели. С синхронизатора 7 на четвертый вход вычислителя 6 подается сигнал, пропорциональный моменту излучения зондирующего сигнала. По величине задержки зондирующего сигнала в вычислителе 6 по известным формулам (Теоретические основы радиолокации. Под ред. Я.Д. Ширмана. - М.: Сов. Радио, 1970, с.221) определяется дальность до цели.
Если от внешнего источника целеуказания на третий вход вычислителя 6 поступили координаты границ заданного сектора по азимуту, в котором ожидается появление скоростных и интенсивно маневрирующих целей, то этот сектор должен быть осмотрен с меньшим периодом обновления информации.
Для этого значение текущей азимутальной координаты луча антенны 1, поступающее на второй вход вычислителя 6, сравнивается с положением границ заданного сектора по азимуту. В момент времени, предшествующий началу этого сектора, со второго выхода вычислителя на вход привода антенны 8 выдается сигнал, по которому скорость вращения антенны устанавливается равной заданной скорости вращения ω. Заданный сектор по азимуту осматривается с постоянной скоростью вращения антенны ω.
При выходе луча из заданного сектора по азимуту по сигналу, поступающему со второго выхода вычислителя 6 на вход привода антенны 8, вращение антенны осуществляется с ускорением α. Затем, если при движении луча к середине области вне заданного сектора по азимуту скорость вращения антенны не достигает значения ωмакс, то при положении луча по азимуту далее середины упомянутой области вращение антенны замедляют с замедлением -α до достижения скорости вращения ω. Если при движении луча к середине области вне заданного сектора по азимуту при каком-либо положении луча по азимуту φi скорость вращения антенны достигает значения ωмакс, то далее антенну продолжают вращать со скоростью ωмакс в пределах угла по азимуту, определяемого из выражения (2), затем вращение антенны замедляют с замедлением -α до достижения скорости вращения ω.
По окончании замедления скорости вращения антенны луч оказывается в начале заданного сектора по азимуту.
При осмотре заданного сектора по азимуту в каждом положении луча осуществляется излучение зондирующего сигнала и прием отраженных сигналов. Если отраженный сигнал обнаружен, то в вычислителе 6 рассчитываются границы строба обнаружения, а затем и стробов подтверждения и сопровождения траектории цели, которые осматриваются при последующих осмотрах заданного сектора по азимуту. При выполнении критерия обнаружения траектории цели параметры траектории с первого выхода вычислителя 6 выдаются потребителю радиолокационной информации. Если координаты границ заданного сектора по азимуту продолжают поступать на третий вход вычислителя 6, то осмотр этого сектора продолжается, продолжается и обнаружение и сопровождение траекторий целей в этом секторе с выдачей их параметров потребителю. Если же поступление координат границ заданного сектора по азимуту прекратилось, то осмотр этого сектора прекращается и продолжается обычный круговой обзор всей зоны с обнаружением и сопровождением траекторий целей с соответствующим периодом обновления информации.
Таким образом, заявляемый способ обеспечивает обнаружение и сопровождение траекторий скоростных и интенсивно маневрирующих целей с достаточно малым периодом обновления информации в заданном секторе по азимуту с помощью РЛС кругового обзора с антенной, выполненной в виде ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту, имеющей значительную массу, то есть достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ ИСПЫТАНИЯ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2008 |
|
RU2400766C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И ОБЗОРНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2292563C2 |
| Способ радиолокационного обзора пространства | 2017 |
|
RU2676673C1 |
| Способ радиолокационного обзора | 2016 |
|
RU2626407C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2016 |
|
RU2611434C1 |
| СПОСОБ ОСМОТРА ЗОНЫ ОБЗОРА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2345380C1 |
Изобретение относится к области радиолокации и может быть использовано для обнаружения траекторий скоростных и интенсивно маневрирующих целей с помощью мобильных радиолокационных станций (РЛС) кругового обзора. Достигаемый технический результат - обнаружение и сопровождение траекторий скоростных и интенсивно маневрирующих целей с достаточно малым периодом обновления информации в заданном секторе по азимуту с помощью РЛС кругового обзора с антенной, выполненной в виде ФАР с электронным управлением лучом по углу места и механическим вращением по азимуту, имеющей значительную массу. Указанный результат обеспечивается за счет прохождения лучом антенны области вне этого сектора с максимальными допустимыми ускорением и скоростью вращения антенны, определяемыми возможностями привода антенны и ее механической прочностью. 5 ил.
Способ обнаружения и сопровождения траектории цели в заданном секторе по азимуту размером φ с помощью радиолокационной станции кругового обзора с антенной, выполненной в виде фазированной антенной решетки, осуществляющей обзор зоны лучом, последовательно перемещаемым по углу места с помощью электронного управления, а по азимуту - с помощью механического вращения антенны, отличающийся тем, что при положении луча в упомянутом секторе антенну вращают с заданной скоростью ω, определяемой исходя из времени, требуемого на осмотр этого сектора, после выхода луча из упомянутого сектора антенну вращают с ускорением α, задаваемым исходя из возможностей привода антенны и ее механической прочности, при этом
если при движении луча по азимуту к середине области вне заданного сектора по азимуту скорость вращения антенны не достигает значения максимальной допустимой скорости вращения антенны ωмакс, задаваемой также исходя из возможностей привода антенны и ее механической прочности, то при положении луча по азимуту далее середины упомянутой области вращение антенны замедляют с замедлением -α до достижения скорости вращения ω,
если при движении луча по азимуту к середине области вне заданного сектора по азимуту при каком-либо положении луча по азимуту φ, скорость вращения антенны достигает значения ωмакс, то далее антенну продолжают вращать с этой скоростью ωмакс в пределах угла по азимуту, определяемого из выражения:  , затем вращение антенны замедляют с замедлением -α до достижения скорости вращения ω.
, затем вращение антенны замедляют с замедлением -α до достижения скорости вращения ω.

