Изобретение относится к области специальной радиотехники и может быть использовано для высокоточного определения фазовым РД способом координат ИРИ, излучающих сигналы с ППРЧ.
Современные ИРИ с ППРЧ имеют сложную структуру сигнала. Рассмотрим сигнал с ППРЧ на примере станции SCIMITAR V. Если представить сигнал станции в пространственно-временной плоскости, то он будет выглядеть, как показано на фиг.1. За время передачи в одну дискрету времени Δ сигнал может модулироваться по частоте речевым сообщением с девиацией частоты относительно несущей fнес±5,6 кГц, либо может передаваться частотная телеграфия со скоростью 16 кбит/с, причем двоичная единица передается частотой fнес+4 кГц, двоичный ноль fнес-4 кГц. Таким образом речевое сообщение или телеграфный сигнал разбивается на отрезки длительностью 4 мс, за 3,5 мс передается отрезок сообщения на какой-либо несущей частоте, затем 0,5 мс передатчик перестраивается на другую частоту, и в следующие 3,5 мс передается новый отрезок сообщения на этой новой частоте и т.д.
Известен фазовый разностно-дальномерный (РД) способ определения координат объектов в навигационных системах на частотах биений. Однако этот способ в том виде, в каком он используется в радионавигации, не может быть применен для определения координат ИРИ с ППРЧ вследствие существенного отличия структур сигналов радионавигационных систем и сетей связи, использующих сигналы с ППРЧ. Главное отличие заключается в том, что для сигнала с ППРЧ неизвестно на какой частоте и каким ИРИ он будет излучен в различные моменты времени.
Известна пассивная самолетная система разведки радиоэлектронных средств "AN/USD-9(V)R", предназначенная для местоопределения ИРИ пеленгационным способом.
Однако эта система обладает низкой точностью при местоопределении ИРИ с ППРЧ. Известна также система определения координат импульсных радиолокационных станций "PLSS", размещаемая на летательных аппаратах (ЛА), предназначенная для местоопределения ИРИ РД способом.
Однако эта система не предназначена для местоопределения связных станций.
Известен РД способ определения координат ИРИ излучающих непрерывные или квазинепрерывные сигналы (прототип), который заключается в том, что М разнесенных пунктов приема и обработки (ППО) принимают, селектируют и демодулируют радиоприемными устройствами (РПрУ) сигналы от I ИРИ, затем с помощью радиопередающих устройств (РПдУ) ретранслируют преобразованные сигналы через узкополосные каналы связи (УКС) с частотной селекцией на центральный пункт обработки (ЦПО), где вычисляются временные разности хода лучей, а по ним и координаты ИРИ.
Оценим потенциальную точность определения координат ИРИ пеленгационным и РД способами. Рассмотрим вначале пеленгационный способ. Приводится формула для дисперсии измерения угла прихода сигнала υ

Предположим, что d=2 м, λ=10 м,  =0°, П=5 кГц, Т=3,5 мс, h=5, тогда συ=0,0445рад=2,55°.
=0°, П=5 кГц, Т=3,5 мс, h=5, тогда συ=0,0445рад=2,55°.
Средняя квадратическая радиальная ошибка определения местоположения ИРИ пеленгационным способом может быть определена по следующей формуле

Возьмем для определенности ω=90° S1=S2=Sср и расстояние между пеленгаторами S=100 км, тогда в этом случае
 ,
,
r=4,45 км.
Для РД способа точность определения временной задержки между двумя сигналами может быть определена по формуле

Как и в случае с пеленгационным способом положим h1=h2=h=5, П=5 кГц, Т=3,5 мс, тогда στ=12,3 мкс
Средняя квадратическая радиальная ошибка определения местоположения ИРИ РД способом определяется по формуле

Коэффициент kг зависит от углов ψ1 и ψ2. Полагая ψ1=ψ2=110° по таблице, находим, что kг=0,9189, тогда r=3,39 км.
Приведенный краткий анализ показывает, что потенциальные возможности пеленгационного и РД способов определения местоположения ИРИ с ППРЧ в том виде, в каком они применяются, весьма ограничены. Следует отметить, что в навигации широко используются фазовые РД система. Применение фазового РД способа могло бы повысить точность определения временной задержки по сравнению с РД способом, взятым за прототип, в  раз, где П - ширина полосы излучаемого сигнала, f0 - его несущая частота. Однако такую высокую точность получить нельзя из-за возникающей неоднозначности, поэтому единственно приемлемая информация содержится в модулирующих колебаниях принимаемых сигналов.
раз, где П - ширина полосы излучаемого сигнала, f0 - его несущая частота. Однако такую высокую точность получить нельзя из-за возникающей неоднозначности, поэтому единственно приемлемая информация содержится в модулирующих колебаниях принимаемых сигналов.
Целью настоящего технического решения является повышение точности определения координат ИРИ, излучающих сигналы с ППРЧ.
Поставленная цель достигается тем, что в известном РД способе определения координат, заключающемся в приеме, селекции и демодуляции М разнесенными ППО с помощью ПРрУ настроенных на N частот, сигналов от I ИРИ, ретрансляции с помощью ПРдУ преобразованных сигналов через УКС с частотной селекцией на РПрУ ЦПО, где вычисляются временные разности хода лучей, а по ним - координаты ИРИ, в каждом пункте приема и обработки измеряют длительность каждого принимаемого селектируемого сигнала, исключают из дальнейшей обработки все сигналы, имеющие длительность большую, нежели чем длительность, принятая для сети связи с ППРЧ, измеряют несущую частоту, фазу, мощность, ширину полосы и время прихода каждого (кроме, разумеется, исключенных) сигнала, мощность шума, передают все эти измеренные значения по УКС на ЦПО, в ЦПО для i,j-ой пары продемодулированных сигналов соответствующих b-ой частоте, принятых от ППОi и ППОj, где i,j=1,M, i≠j и расположенных в l-м временном интервале, который определяется по времени прихода этих сигналов на ППОi и ППОj, оценивают погрешность измерения временной разности хода лучей по демодулированным сигналам по формуле (3), исключают из дальнейших расчетов данные, для которых  , где Δf - шаг дискретизации частотной сетки сети связи с ППРЧ (для диапазона 30...88 МГц Δf=25 кГц), находят ранее измеренные значения временных задержек, удовлетворяющие условию
, где Δf - шаг дискретизации частотной сетки сети связи с ППРЧ (для диапазона 30...88 МГц Δf=25 кГц), находят ранее измеренные значения временных задержек, удовлетворяющие условию

где  ,
,  - значения временных задержек, соответствующих b-ой и p-ой частоте и измеренных в l-й и m-й интервалы времени;
- значения временных задержек, соответствующих b-ой и p-ой частоте и измеренных в l-й и m-й интервалы времени;
στmax - наибольшее из двух значений средних квадратических отклонений (СКО) от и ;
k - коэффициент, характеризующий вероятность попадания в указанный интервал.
Определяют число работающих станций, расположенных около линии положения (гиперболы), разность расстояний для которой определяется уравнением  , внутри интервала
, внутри интервала

где c - скорость света, по числу временных задержек, для которых справедливо выражение (5), определяют разность фаз  , разность разностей фаз
, разность разностей фаз  , разность расстояний с учетом всех возможных неоднозначностей, строят гистограмму числа попаданий вычисленных разностей расстояний в указанные отрезки, длина которых определяется необходимой точностью местоопределения и точностью измерения фаз сигналов на ППО, определяют по гистограмме точные значения разностей расстояний путем выбора наибольшего значения, потом второго по величине и т.д. столько раз, сколько имеется излучателей, расположенных в интервале определяют координаты излучателей по точным значениям разностей расстояний, причем неоднозначность привязки одной гиперболы к другой устраняется путем сравнения комбинаций частот, соответствующих выбранным максимумам гистограммы.
, разность расстояний с учетом всех возможных неоднозначностей, строят гистограмму числа попаданий вычисленных разностей расстояний в указанные отрезки, длина которых определяется необходимой точностью местоопределения и точностью измерения фаз сигналов на ППО, определяют по гистограмме точные значения разностей расстояний путем выбора наибольшего значения, потом второго по величине и т.д. столько раз, сколько имеется излучателей, расположенных в интервале определяют координаты излучателей по точным значениям разностей расстояний, причем неоднозначность привязки одной гиперболы к другой устраняется путем сравнения комбинаций частот, соответствующих выбранным максимумам гистограммы.
Сопоставительный анализ заявляемого решения с прототипом показывает, что заявляемый способ отличается от известного тем, что разность расстояний определяют по разности разностей фаз принимаемых сигналов. Таким образом, заявляемый способ соответствует критерию изобретения "новизна". Известны технические решения, в которых определяют разность расстояний по разности разностей фаз. Однако эти решения применимы только для полностью известных сигналов - радионавигационных. Это позволяет сделать вывод о его соответствии критерию "существенные отличия".
Фазовый РД способ определения координат ИРИ, излучающих сигналы с ППРЧ работает следующим образом. Для определенности положим, что в качестве ИРИ используются станции SCIMITAR V. Примем также, что число ППО равно наименее возможному, т.е. M=3. Предположим, что число одновременно принимаемых сигналов, которое определяется возможностями аппаратуры ППО, равно 21 (N=21). Примем время наиболее короткой передачи одного ИРИ 4 с. Учитывая, что длительность временного интервала излучение-перестройка на другую частоту равна Δип=4 мс, то, следовательно, за кратчайший сеанс связи будет излучено 1000 посылок в диапазоне 30...88 МГц. РПрУ ППО настроены на частоты f0=30 МГц, f1=30,025 МГц, f2=30,050 МГц...f20=30,5 МГц. Закон изменения частоты ИРИ обычно неизвестен и поэтому значение несущей частоты посылки сигнала, излучаемого в интервал времени Δ является дискретной случайной величиной. Однако известно, что она равномерно распределена на интервале 30...88 МГц с шагом дискретизации 25 кГц. Таким образом, число возможных частот излучения равно 2321. Оценим вероятность того, что сигнал от какого-либо h-го ИРИ появится на N частотах, на которые настроены ППО, x раз за время наблюдения ТН=П·Δun, где n - число излучаемых посылок. Чтобы более наглядно представить подобную ситуацию, обратимся к фиг.2. Здесь крестиками представлена частотно-временная диаграмма реализации конкретной случайной выборки. По оси t отложены номера интервалов измерений, по оси f - номера частот. Как видно из фиг.2, нас удовлетворяют те ситуации, когда частота излучаемого сигнала располагается под чертой, соответствующей N-ой частоте (крестики обведены кружками). Вероятность попадания излучаемой посылки в нужную частотную область за один интервал дискретизации равна
Вероятность того, что на N частотах из Nв возможных появится x посылок за время наблюдения, равное n интервалам дискретизации может быть записана следующим образом

где  - число сочетаний из n по x.
- число сочетаний из n по x.
Математическое ожидание (МО) числа x находится по формуле
Вероятность того, что в нужную частотную область попадет x посылок и более равна

Определим МО числа x для данных, которые были представлены выше. Как уже было показано, за кратчайший сеанс связи излучается n=1000 посылок. Учитывая, что N=21, a Nв=2321, получим, что θ=9,048·10-3 и  =9,048. Как будет показано далее путем моделирования на ЭВМ, 9 попаданий в нужную частотную область вполне достаточно, чтобы осуществить местоопределение предлагаемым способом.
=9,048. Как будет показано далее путем моделирования на ЭВМ, 9 попаданий в нужную частотную область вполне достаточно, чтобы осуществить местоопределение предлагаемым способом.
На каждом ППО с помощью РПрУ принимаются сигналы, появляющиеся на частотах 30 МГц, 30,025 МГц, 30,050 МГц...30,5 МГц. Каждый из сигналов селектируется, затем измеряется его длительность. Для нашего примера допустим, что на выбранных частотах 30...30,5 МГц появляются только сигналы с ППРЧ, т.е. на этих частотах не работают станции с фиксированной рабочей частотой, и ни один из выбранных каналов не блокируется. Далее измеряются частота, фаза, мощность, ширина полосы и время прихода каждого сигнала. Время прихода оценивается грубо, например, по переднему фронту сигнальной посылки. Цель этого измерения - определение временного интервала Δип, в течение которого была излучена эта посылка, чтобы соблюдать синхронность работы всех ППО. Синхронизация работы всей системы может осуществляться либо с ЦПО, либо с помощью высокостабильных стандартов частоты, располагаемых на каждом ППО и ЦПО. На каждой частоте измеряется мощность шума во время, когда сигнал на данной частоте отсутствует. Далее каждый сигнал демодулируется и вместе с его измеренными значениями частоты, фазы, мощности, ширины полосы спектра, времени прихода, а также с измеренной мощностью шума передается по УКС на ЦПО.
На ЦПО обработка осуществляется следующим образом. В l-й интервал дискретизации Δипl по УКС от трех ППО-ППО1, ППО2 и ППО3 - принимаются продемодулированные сигналы, излученные h-м ИРИ  а также соответствующие им значения частоты
а также соответствующие им значения частоты  фаз
фаз  ,
,  ,
,  , мощностей
, мощностей  ,
,  ,
,  , ширины полосы пl мощностей шума
, ширины полосы пl мощностей шума  ,
,  ,
,  . По демодулированным сигналам находятся временные разности хода лучей от ИРИ до ППОi и ППОj
. По демодулированным сигналам находятся временные разности хода лучей от ИРИ до ППОi и ППОj
 дли всех частот fl имеющихся в интервале Δипl. Учитывая, что линейно независимых значений временных разностей только два, будем искать
дли всех частот fl имеющихся в интервале Δипl. Учитывая, что линейно независимых значений временных разностей только два, будем искать  и
и  . Операции, осуществляемые далее с сигналами и соответствующими им данными идентичны для пар 1-2 и 3-2, поэтому для определенности выберем пару 1-2 и для упрощения записи эти индексы в дальнейшем будем опускать. Следующей операцией является нахождение СКО измерения временной задержки между сигналами
. Операции, осуществляемые далее с сигналами и соответствующими им данными идентичны для пар 1-2 и 3-2, поэтому для определенности выберем пару 1-2 и для упрощения записи эти индексы в дальнейшем будем опускать. Следующей операцией является нахождение СКО измерения временной задержки между сигналами  по формуле (3). Данные, для которых
по формуле (3). Данные, для которых  выбывают из дальнейшей обработки. Коэффициент k выбирается из условия заданной вероятности попадания измеряемой величины временной задержки в интервал
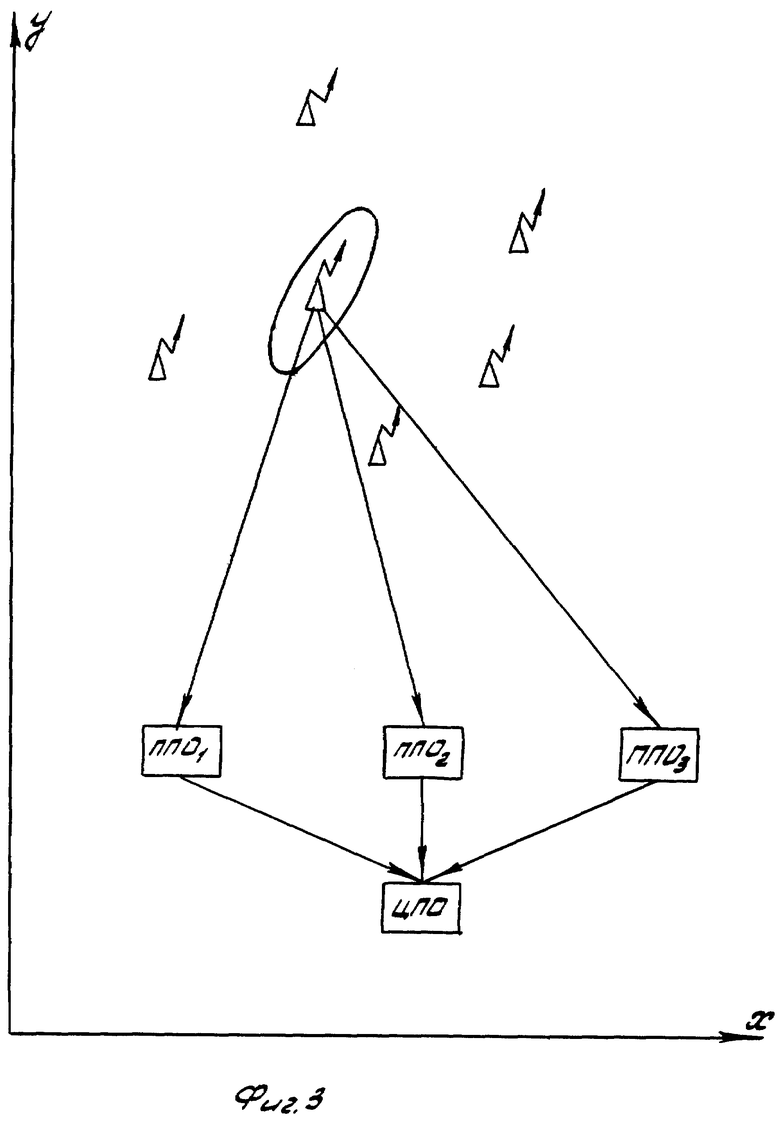
выбывают из дальнейшей обработки. Коэффициент k выбирается из условия заданной вероятности попадания измеряемой величины временной задержки в интервал  , где τи - истинное значение временной задержки. Для нашего случая зададимся вероятностью попадания 0,997, тогда по таблице /12, с.375/ находим, что k=3, т.е. СКО определения задержки не должна превышать 13,333 мкс, или же СКО определения разности расстояний должно быть менее 13,333 мкс·3·108 м/с=4 км. В случае, если в качестве опорной выбрана временная задержка, соответствующая h-му ИРИ, и ближайшие ИРИ удалены от ИРИ на расстояния, превышающие размеры эллипса ошибок (см. фиг.3), то в l-й момент времени может присутствовать только одно измерение временной задержки, которое соответствует какой-либо одной частоте из 21 возможных и удовлетворяет условию попадания задержки в указанный выше интервал (5) для каждой пары сигналов 1-2 и 3-2. В этом случае такому условию удовлетворяют только значения временных задержек измеренных для сигнальных посылок, поступивших от пар ППО1-ППО2 и ППО2-ППО3 и излученных ИРИh. Если в районе эллипса ошибок работают β ИРИ, то получим β задержек, удовлетворяющих условию (5). Таким образом это был этап грубой пространственной селекции сигналов с ППРЧ. Далее необходимо определить число ИРИ β, работающих в пространстве, ограниченным эллипсом ошибок определения координат ИРИ по демодулированным сигналам. Для этого запишем выражение для вероятности попадания æ сигнальных посылок от β ИРИ, расположенных в указанной области пространства, в N частот из Nв возможных за один интервал дискретизации. Для этого найдем число нужных ситуаций и разделим его на число возможных. В нужную область попадет æ посылок. При этом неважно от каких именно ИРИ получены эти посылки, следовательно, необходимо определить число ситуаций, при которых не занято N-æ(æ≤N) частотных позиций, оно равно
, где τи - истинное значение временной задержки. Для нашего случая зададимся вероятностью попадания 0,997, тогда по таблице /12, с.375/ находим, что k=3, т.е. СКО определения задержки не должна превышать 13,333 мкс, или же СКО определения разности расстояний должно быть менее 13,333 мкс·3·108 м/с=4 км. В случае, если в качестве опорной выбрана временная задержка, соответствующая h-му ИРИ, и ближайшие ИРИ удалены от ИРИ на расстояния, превышающие размеры эллипса ошибок (см. фиг.3), то в l-й момент времени может присутствовать только одно измерение временной задержки, которое соответствует какой-либо одной частоте из 21 возможных и удовлетворяет условию попадания задержки в указанный выше интервал (5) для каждой пары сигналов 1-2 и 3-2. В этом случае такому условию удовлетворяют только значения временных задержек измеренных для сигнальных посылок, поступивших от пар ППО1-ППО2 и ППО2-ППО3 и излученных ИРИh. Если в районе эллипса ошибок работают β ИРИ, то получим β задержек, удовлетворяющих условию (5). Таким образом это был этап грубой пространственной селекции сигналов с ППРЧ. Далее необходимо определить число ИРИ β, работающих в пространстве, ограниченным эллипсом ошибок определения координат ИРИ по демодулированным сигналам. Для этого запишем выражение для вероятности попадания æ сигнальных посылок от β ИРИ, расположенных в указанной области пространства, в N частот из Nв возможных за один интервал дискретизации. Для этого найдем число нужных ситуаций и разделим его на число возможных. В нужную область попадет æ посылок. При этом неважно от каких именно ИРИ получены эти посылки, следовательно, необходимо определить число ситуаций, при которых не занято N-æ(æ≤N) частотных позиций, оно равно  . В то же самое время для каждой указанной ситуации совершенно все равно как расположатся незанятые позиции в ненужной частотной области. Учитывая, что число безразличных ситуаций, соответствующих каждой нужной равно
. В то же самое время для каждой указанной ситуации совершенно все равно как расположатся незанятые позиции в ненужной частотной области. Учитывая, что число безразличных ситуаций, соответствующих каждой нужной равно  получим, что общее число нужных ситуаций равно
получим, что общее число нужных ситуаций равно  Число возможных ситуаций равно
Число возможных ситуаций равно  Таким образом получаем выражение для условной вероятности попадания æ сигнальных посылок от β ИРИ в N частот из Nв возможных за один интервал дискретизации
Таким образом получаем выражение для условной вероятности попадания æ сигнальных посылок от β ИРИ в N частот из Nв возможных за один интервал дискретизации

МО величины æ можно выразить в виде 
Вероятность того, что в заданной области пространства работают β ИРИ при условии, что в нужный частотный диапазон за один интервал дискретизации попало æ сигнальных посылок, выражается формулой Байеса /12, с.15/ для апостериорной вероятности

где в(β) - безусловная вероятность того, что в заданной области пространства находится β ИРИ;
γ - наиболее возможное значение β.
Для того чтобы обрабатывать всю принимаемую реализацию, необходимо записать выражение (11) для векторного параметра

Соответственно (12) перепишется как
при этом β≥æmax.
Введем величину æΣ=æ1+æ2+...+æn, при этом МО æΣ можно записать как 
На основании этого β можно оценивать в виде
Следующий этап обработки включает в себя операции с фазовыми измерениями. Как отмечалось выше, на каждом ППО измеряется фаза каждого принимаемого сигнала и значение этой фазы по УКС передается на ЦПО. При этом фаза измеряется относительно опорного сигнала. Опорные сигналы на ППО строго фазируются по сигналам с ЦПО, либо с помощью высокостабильных стандартов частоты.
Фаза сигнала, излученного ИРИh на частоте  в l-й интервал дискретизации, принятого ППОi равна
в l-й интервал дискретизации, принятого ППОi равна

где  - расстояние от ИРИh до ППОi;
- расстояние от ИРИh до ППОi;
 - число длин волн на частоте
- число длин волн на частоте  , укладывающихся в
, укладывающихся в  ;
;
 - начальная фаза сигнала, излучаемого h-м ИРИ в l-й момент времени;
- начальная фаза сигнала, излучаемого h-м ИРИ в l-й момент времени;
ϕоп - фаза опорного сигнала.
Разность фаз между сигналами, принятыми ППО1 и ППО2 будет (индексы 12, как условились, опускаем)

где 


По выражению (16) еще нельзя определить разность расстояний Rh, т.к. очень велика неоднозначность, обуславливаемая коэффициентом  . Для разрешения неоднозначности необходимо определять разности разностей фаз, соответствующих различным интервалам дискретизации и разным частотам
. Для разрешения неоднозначности необходимо определять разности разностей фаз, соответствующих различным интервалам дискретизации и разным частотам

где 
Отсюда следует, что разность расстояний равна

Коэффициент  характеризует уже число длин волн на разностной частоте
характеризует уже число длин волн на разностной частоте  , умещающихся в Rh.
, умещающихся в Rh.
Следует отметить, что однозначно разность расстояний Rh по формуле (18) может быть определена только, когда  . Для всех остальных значений разностных частот от 50 до 500 кГц отсчеты Rh будут неоднозначными. В общем случае целая величина в (18) меняется от
. Для всех остальных значений разностных частот от 50 до 500 кГц отсчеты Rh будут неоднозначными. В общем случае целая величина в (18) меняется от  до
до  где ]·[ означает округление находящегося в этих скобках числа до ближайшего целого,
где ]·[ означает округление находящегося в этих скобках числа до ближайшего целого,  - грубое измерение разностей расстояний между ИРИ-ППО1 и ИРИ-ППО2 по демодулированным сигналам. Так как производится не одно измерение, а несколько, то можно выбрать для которого СКО наименьшее, или же произвести статистическое усреднение всех измеренных значений
- грубое измерение разностей расстояний между ИРИ-ППО1 и ИРИ-ППО2 по демодулированным сигналам. Так как производится не одно измерение, а несколько, то можно выбрать для которого СКО наименьшее, или же произвести статистическое усреднение всех измеренных значений
Кроме того, необходимо отметить, что выражение (17) описывает работу способа для случая, когда в области пространства, ограниченной эллипсом ошибок, находится один ИРИ. Если же там находится β ИРИ, то уже неизвестно, по какому признаку отличать одну сигнальную посылку от другой. В этом случае необходимо находить все возможные значения разностей фаз  между сигналами принятыми от h-го и S-го ИРИ. Правильные измерения получаются при h=S, ложные - при h≠S. Далее необходимо определить по формуле (18) все значения разностей расстояний, которые удовлетворяют условию (6) для каждой пары 1-2 и 2-3 одновременно.
между сигналами принятыми от h-го и S-го ИРИ. Правильные измерения получаются при h=S, ложные - при h≠S. Далее необходимо определить по формуле (18) все значения разностей расстояний, которые удовлетворяют условию (6) для каждой пары 1-2 и 2-3 одновременно.
Чтобы извлечь нужную информацию из всего этого потока, разбивают интервал (6) на равные участки, длина которых определяется необходимой точностью местоопределения и точностью измерения фаз сигналов на ППО. Так, например, если СКО измерения разности разностей фаз не превышает 3,6°, то, следовательно, длина каждого участка должна быть равна одной сотой от наибольшей длины волны на разностной частоте. Так как наибольшая длина волны равна  то длина участка должна быть 120 м. В то же время, если нас устраивает точность, равная 500 м, то длину участка можем выбрать равной 500 м.
то длина участка должна быть 120 м. В то же время, если нас устраивает точность, равная 500 м, то длину участка можем выбрать равной 500 м.
Разбив интервал (6) на участки, подсчитываем для каждого из них число значений разностей расстояний, попадающих в данные отрезки, и строим гистограмму. Далее находим главный максимум гистограммы, затем следующий по величине и т.д. столько раз сколько ИРИ находится в заданной области пространства. Число ИРИ определяется из (14а).
Далее осуществляется привязка максимума гистограммы, соответствующей паре 1-2 к максимуму гистограммы пары 2-3. Для этого определяются комбинации частот, соответствующие каждому выбранному максимуму гистограммы и находятся наиболее похожие для разных пар. Это правило вытекает непосредственно из выражения (18), на основании которого одновременно, вычисляются разности расстояний для пар 1-2 и 2-3. Отсюда видим, что единственный параметр, который одинаков для обоих пар, это  . Если, например, вычисление
. Если, например, вычисление  для пары 1-2 сделано на частотах fl и fm, то можно пронумеровать это значение разности расстояний, а также и все соответствующие ему неоднозначные значения, обусловленные незнанием коэффициента k, еще одним i-м индексом. То же самое сделаем и для пары 2-3. Таким образом, каждый отсчет гистограммы маркируется своим индексом. По набору индексов каждого максимума и осуществляется привязка максимума одной пары к максимуму другой. Последним этапом работы способа является вычисление координат ИРИ по точным значениям разностей расстояний, соответствующих главным максимумам гистограмм.
для пары 1-2 сделано на частотах fl и fm, то можно пронумеровать это значение разности расстояний, а также и все соответствующие ему неоднозначные значения, обусловленные незнанием коэффициента k, еще одним i-м индексом. То же самое сделаем и для пары 2-3. Таким образом, каждый отсчет гистограммы маркируется своим индексом. По набору индексов каждого максимума и осуществляется привязка максимума одной пары к максимуму другой. Последним этапом работы способа является вычисление координат ИРИ по точным значениям разностей расстояний, соответствующих главным максимумам гистограмм.
Работоспособность способа проверялась путем моделирования на ЭВМ. Следует отметить, что в модель не включались операции, выполнимость которых очевидна. Так, например, предлагалось, что все операции до фазовых измерений уже выполнены и остается вычислить точные значения разностей расстояний. На фиг.4 представлена программа построения гистограммы для следующих исходных данных. Число попаданий сигнальных посылок в нужную, частотную область за время наблюдения 4 с от одного ИРИ равна 10. Обработка информации осуществляется для одной пары ППО, имеющих координаты (0,0), (105,0), при этом расстояния измеряются в метрах. Предполагается, что в зоне, ограниченной эллипсом ошибок располагается один ИРИ с координатами (104, 105). Предполагается, что погрешность грубого измерения разности расстояний меньше 12 км. Истинная разность расстояний равна 34037,483 м. Длина интервалов гистограммы принимается равной 100 м. Реализация программы показана на фиг.5 в виде гистограммы. Как видим, главный максимум хорошо заметен на фоне ложных. Для случая, когда в указанной области пространства расположены два ИРИ с координатами (104, 105) (2.104, 105), программа модели представлена на фиг.6, а соответствующая ей гистограмма - на фиг.7. Здесь также четко выступают два главных максимума. Таким образом, представленные результаты моделирования подтверждают работоспособность заявляемого способа. Использование предлагаемого фазового РД способа определения координат ИРИ с ППРЧ позволяет повысить точность определения координат ИРИ с ППРЧ. Для исходных данных, представленных выше (ширина полосы сигнала П=5 кГц, шаг дискретизации частотной сетки Δf=25 кГц) точность возрастет в 
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕЛЕНГАЦИИ ИСТОЧНИКОВ РАДИОСИГНАЛОВ С ПСЕВДОСЛУЧАЙНОЙ ПЕРЕСТРОЙКОЙ РАБОЧЕЙ ЧАСТОТЫ В КОРОТКОВОЛНОВОМ ДИАПАЗОНЕ | 2010 |
|
RU2461015C2 |
| Разностно-дальномерный способ определения координат источника радиоизлучения | 2019 |
|
RU2717231C1 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2014 |
|
RU2568104C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ МИНИМАЛЬНОГО ЧАСТОТНОГО СДВИГА (MSK) СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2020 |
|
RU2747108C1 |
| МНОГОПОЗИЦИОННЫЙ ПАССИВНЫЙ РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС, РЕАЛИЗУЮЩИЙ КОМБИНИРОВАННЫЙ ОДНОЭТАПНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЭТАПЕ ЗАХОДА НА ПОСАДКУ | 2015 |
|
RU2632922C2 |
| РАЗНОСТНО-ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2539968C1 |
| Система пассивной локации для определения координат летательного аппарата в ближней зоне аэродрома и на этапе захода на посадку с резервным каналом определения дальности | 2016 |
|
RU2633380C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения (варианты) и устройство для их реализации | 2020 |
|
RU2740640C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЗАИМНОЙ ЗАДЕРЖКИ MSK СИГНАЛОВ ПАКЕТНЫХ РАДИОСЕТЕЙ В РАЗНОСТНО-ДАЛЬНОМЕРНОЙ СИСТЕМЕ МЕСТООПРЕДЕЛЕНИЯ | 2016 |
|
RU2623094C1 |
| Разностно-дальномерный способ определения координат источника радиоизлучения и устройство для его реализации | 2019 |
|
RU2719770C1 |

Изобретение относится к радиотехнике и может быть использовано для высокочастотного определения координат источников радиоизлучения. Технический результат заключается в повышении точности. Фазовый разностно-дальномерный способ определения координат источников радиоизлучений с программной перестройкой рабочей частоты включает прием, селекцию и демодуляцию М разнесенными пунктами приема и обработки с помощью радиоприемных устройств, настроенных на N частот сигналов от I источников радиоизлучений, ретрансляцию преобразованных сигналов через узкополосные каналы связи с частотной селекцией на центральный пункт обработки, вычисление на нем временных разностей хода лучей и по ним - координат источников радиоизлучении. В каждом пункте приема и обработки дополнительно измеряют длительность каждого принимаемого селектируемого сигнала, исключают из дальнейшей обработки все сигналы, имеющие длительность большую, чем длительность, принятая для сети с программной перестройкой рабочей частоты. Затем измеряют несущую частоту, мощность, ширину полосы и время прихода каждого сигнала, а также мощность шума. Передают все эти измеренные значения по узкополосным каналам связи на центральный пункт обработки, где для i, j-ой пары продемодулированных сигналов соответствующих b-ой частоте и расположенных в l-м интервале времени оценивают погрешность измерения временной разности хода лучей. Далее исключают из дальнейших расчетов данные, для которых оцененная погрешность больше интервала однозначного измерения, находят значение временных задержек. Затем определяют число станций β, находят разность фаз ϕh ije(i≠j), разность разностей фаз ϕh ije-ϕp ijm(n≠p), точную разность хода лучей Rij и точные координаты источников радиоизлучений. 1 з.п. ф-лы. 3 ил.

где  ,
,  - значение временных задержек, соответствующих b-ой и р-ой частотам и измеренных в l-й и m-й интервалы времени;
- значение временных задержек, соответствующих b-ой и р-ой частотам и измеренных в l-й и m-й интервалы времени;
σττmax - наибольшее из двух значений средних квадратических отклонений от и ;
К - коэффициент, характеризующий вероятность попадания в указанный интервал,
определяют число станций β, для сигналов которых справедливо указанное выражение, находят разность фаз  разность разностей фаз
разность разностей фаз  , точную разность хода лучей Rij и точные координаты источников радиоизлучений.
, точную разность хода лучей Rij и точные координаты источников радиоизлучений.
где  æ - число сигнальных посылок, попавших в N частот из Nв возможных в l-й интервал времени; Nв - число частот, на которых возможно появление сигнальной посылки; n - число интервалов дискретизации; ][ - окружение до ближайшего целого, заключенного в скобки числа.
æ - число сигнальных посылок, попавших в N частот из Nв возможных в l-й интервал времени; Nв - число частот, на которых возможно появление сигнальной посылки; n - число интервалов дискретизации; ][ - окружение до ближайшего целого, заключенного в скобки числа.
| В.Б.Пестряков, В.Д.Кузнецов | |||
| Радиотехнические системы, М.: Радио и связь, 1985 | |||
| В.С.Кондратьев и др | |||
| Многопозиционные радиотехнические системы, М.: Радио и связь, 1986, стр.15, 46, 288-241. |

