Изобретение относится к области приборостроения и может быть использовано при определении направления географического меридиана с применением двухстепенного гироскопа.
Известен способ определения направления географического меридиана, основанный на измерении моментов, которые действуют на двухстепенный гироскоп, включенный в режим обратной связи по моменту. Согласно этому способу, ось прецессии гироблока устанавливают в вертикальное положение и производят измерения тока обратной связи в трех положениях оси вращения ротора гироблока: в положении, близком направлению на Север, в положении, развернутом вокруг оси прецессии на 180°, и в положении, развернутом вокруг оси прецессии на 90° (последнее положение необходимо для определения масштабного коэффициента гироблока). По измеренным значениям тока обратной связи производят вычисление угла ϕ между первым положением оси вращения ротора и направлением меридиана:
II, III - ток обратной связи соответственно в положении, близком к направлению на Север, и в положении, развернутом на 180°, мА;
K - масштабный коэффициент гироблока по току датчика момента, мА. град-1·ч;
Ωз.г - горизонтальная составляющая угловой скорости суточного вращения Земли, град·ч-1;
Δω - нестабильность составляющей скорости ухода гироблока, не зависящей от ускорения, град·ч-1.
Нестабильность Δω, обуславливаемая рядом факторов, например, трением в опорах оси подвеса, тяжением электроэлементов и т.д., определяет погрешность измерения угла ϕ и, следовательно, направления географического меридиана.
Известный способ имеет тот недостаток, что если в качестве двухстепенного гироскопа используется поплавковый гироблок с камневыми опорами оси подвеса поплавка, нестабильность Δω может возрастать из-за угловых перемещений поплавка, происходящих вокруг оси чувствительности в пределах радиальных зазоров камневых опор (так называемой "третьей степени свободы" двухстепенного поплавкового гироблока). Действительно, пусть при измерении тока обратной связи в положении, близком к направлению на Север, поплавок не вращается вокруг оси чувствительности и находится в "устойчивом положении", т.е. прижимается к камневым втулкам гироскопическим моментом от вертикальной составляющей ΩЗ.В. угловой скорости суточного вращения Земли. Если теперь поворот гироблока в развернутое на 180° положение осуществить со скоростью ΩР, превосходящей скорость ΩЗ.В. и противоположно ей направленной, то под действием гироскопического момента H ΩP (здесь Н - кинетический момент) поплавок отойдет от "устойчивого положения" и при последующем измерении тока обратной связи будет вращаться в "устойчивое положение" под действием момента Н ΩЗ.В.. Поскольку это вращение поплавка происходит вокруг оси чувствительности, оно вызывает дополнительную скорость ухода гироблока, равную скорости указанного вращения, и тем самым обуславливает увеличение нестабильности Δω при измерениях тока обратной связи в разных положениях гироблока. При этом, как уже отмечалось выше, снижается точность определения направления географического меридиана.
Известен способ определения направления меридиана, в котором указанный недостаток отсутствует (см. авт.св. 1839795, 139055 кл. G 01 с 19/38) и который принимается за прототип предлагаемого технического решения. Согласно этому способу, установку оси вращения ротора гироблока в каждое из трех положений (в положение, близкое к направлению на Север, в положении, развернутое на 180°, и в положении, развернутое на 90°) производят непосредственно перед измерением тока обратной связи путем разворотов гироблока вокруг вертикальной оси прецессии в одном и том же направлении, совпадающем с вертикальной составляющей ΩЗ.В. (против часовой стрелки, если смотреть сверху в северном полушарии. В результате при измерении тока обратной связи в каждом положении гироблока поплавок все время прижимается к камневым втулкам гироскопическим моментом ΩЗ.В и занимает неподвижное "устойчивое положение". Таким образом, устраняется возможное увеличение нестабильности Δω скорости ухода из-за наличия "третьей степени свободы" двухстепенного поплавкового гироблока.
Однако механический контакт между цапфами и камневыми втулками прибора вызывает нестабильный момент на оси подвеса поплавка вследствие трения и погрешностей геометрии камневых опор. Как уже отмечалось, этот момент является одной из основных причин нестабильности Δω и, как следствие, неточности определения направления географического меридиана.
Целью настоящего изобретения является повышение точности определения направления географического меридиана.
Указанная цель достигается тем, что в известном способе определения направления географического меридиана, основанном на измерении моментов, действующих на двухстепенный гироскоп, включенный в режим обратной связи, при котором ось прецессии гироблока устанавливают в вертикальное положение, производят измерение тока обратной связи в трех положениях оси вращения ротора гироблока: в положении, близком к направлению на Север, в положении развернутом вокруг оси прецессии на 180°, и в положении, развернутом на 90°, причем установку оси вращения ротора в каждое положение осуществляют непосредственно перед измерением тока обратной связи путем разворота гироблока вокруг оси прецессии в одном и том же направлении, и вычисляют угол между первым положением оси вращения ротора гироблока и направлением меридиана, разворот гироблока вокруг оси прецессии в каждое положение оси вращения ротора производят в направлении, противоположном вертикальной составляющей угловой скорости суточного вращения Земли (по часовой стрелке, если смотреть сверху в Северном полушарии).
Выполнение разворотов гироблока в направлении, противоположном вертикальной составляющей ΩЗ.В. суточного вращения Земли, приводит к тому, что при последующих измерениях тока обратной связи поплавок вращается под действием гироскопического момента Н ΩЗ.В. в пределах радиального зазора камневых опор. В результате этого механический контакт между цапфами и камневыми втулками в процессе измерений будет отсутствовать и, как следствие, будут отсутствовать нестабильный момент на оси подвеса поплавка и вызываемая этим моментом погрешность определения направления меридиана.
Указанное вращение поплавка вокруг оси чувствительности не будет вызывать погрешности определения направления меридиана, поскольку оно будет происходить с одной и той же скоростью как при измерении тока обратной связи в положении, близком к направлению на Север, так и при измерении тока обратной связи в положении, развернутом вокруг оси прецессии на 180°.
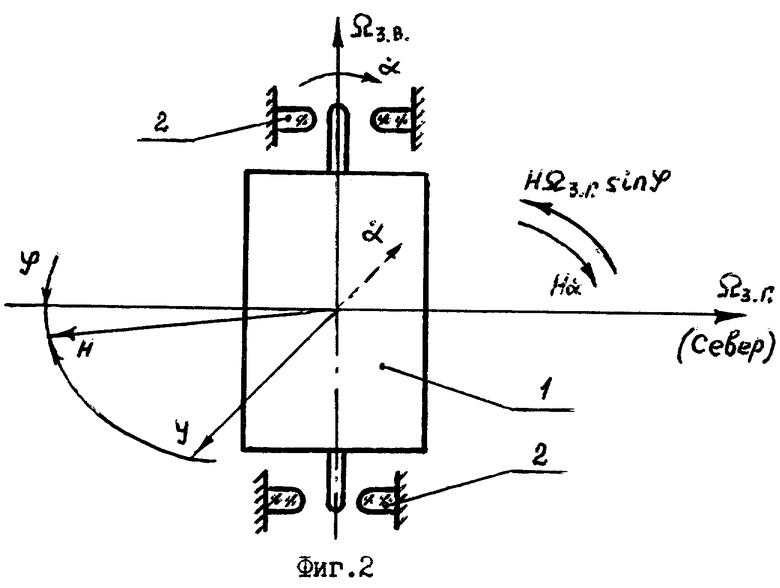
Предложенный способ поясняется фиг.1 и фиг.2, на которых схематично показано расположение поплавка в процессе измерения тока обратной связи соответственно в положении, близком к направлению на Север и в положении, развернутом на 180°.
Способ включает в себя следующие операции. Гироблок с вертикальной осью прецессии разворачивают со скоростью ΩР, направленной противоположно вертикальной составляющей ΩЗ.В.,в положение, при котором ось Н отклонена от направления меридиана на небольшой угол ϕ. Сразу же после окончания разворота поплавок 1, прижатый моментом Н ΩР к камневым опорам 2, начинает вращаться под действием гироскопического момента Н ΩЗ.В. вокруг оси чувствительности y.
Это вращение происходит в пределах радиального зазора камневых опор 2 со скоростью 
где N - коэффициент демпфирования вращения поплавка вокруг оси y. В процессе указанного вращения, когда механический контакт между цапфами поплавка 1 и камневыми втулками опор 2 отсутствует (см. фиг.1), производят измерение тока II обратной связи, который равен:

Затем гироблок разворачивают на 180° в том же направлении, и снова после окончания разворота поплавок начинает вращаться вокруг оси y с такой же скоростью 
В процессе этого вращения, когда механический контакт между цапфами поплавка 1 и камневыми втулками опор 2 отсутствует (см. фиг.2), производят измерение тока III обратной связи, который равен:

После этого, вычитая из формулы (2) формулу (3), вычисляют искомый угол ϕ между первым положением оси Н и направлением меридиана:
Как видно, вращение поплавка вокруг оси чувствительности в обоих положениях с одной и той же скоростью  не вызывает погрешности определения направления меридиана. В то же время, отсутствие в процессе измерения токов обратной связи механического контакта между цапфами поплавка и камневыми втулками опор устраняет нестабильность Δϕ, вызываемую нестабильностью момента на оси подвеса из-за трения и погрешностей геометрии камневых опор, и, как следствие, повышает точность определения направления меридиана.
не вызывает погрешности определения направления меридиана. В то же время, отсутствие в процессе измерения токов обратной связи механического контакта между цапфами поплавка и камневыми втулками опор устраняет нестабильность Δϕ, вызываемую нестабильностью момента на оси подвеса из-за трения и погрешностей геометрии камневых опор, и, как следствие, повышает точность определения направления меридиана.
Следует отметить, что время, в течение которого происходит вращение поплавка вокруг оси чувствительности и отсутствует механический контакт между цапфами и камневыми втулками, достаточно продолжительно. Действительно, это время можно определить следующим выражением:
где α - угол, в пределах которого возможно вращение поплавка вокруг оси чувствительности.
Для реальных поплавковых гироблоков α≈20", N/H≈3000, тогда время t составляет около 2 часов.
Если при использовании известного способа с разворотами гироблока в направлении, совпадающем с ΩЗ.В., нестабильность Δω скорости ухода составляла 0,0009-0,0014 град/ч, то при определении направления меридиана по предлагаемому способу нестабильность Δω не превысила 0,0007 град/ч.
Таким образом, использование предлагаемого способа определения направления меридиана позволяет по сравнению с существующим способом повысить точность измерений за счет снижения нестабильных моментов на оси подвеса поплавкового гироблока с камневыми центрирующими опорами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1977 |
|
SU1839795A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕРИДИАНА | 1970 |
|
SU1840659A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОПРИБОРА, НАПРИМЕР ИНТЕГРИРУЮЩЕГО ГИРОСКОПА | 1977 |
|
SU1840722A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2013 |
|
RU2526513C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2018 |
|
RU2700720C1 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
Изобретение относится к области приборостроения и может быть использовано при определении направления географического меридиана с применением двухстепенного гироскопа. Сущность: способ основан на измерении тока обратной связи двухстепенного гироскопа, ось прецессии которого устанавливают в вертикальное положение. Измерение тока обратной связи производят в трех положениях оси вращения ротора гироскопа: в положении, близком направлению на Север, в положении, развернутом вокруг оси прецессии на 180°, и в положении, развернутом на 270°. Установку оси вращения ротора гироскопа в каждое положение осуществляют непосредственно перед измерением тока обратной связи путем разворота гироблока вокруг оси прецессии. По результатам измерений определяют положение направления меридиана. При этом развороты гироблока вокруг оси прецессии производят в направлении, противоположном направлению вертикальной составляющей угловой скорости суточного вращения Земли. Технический результат: повышение точности определения направления географического меридиана. 2 ил.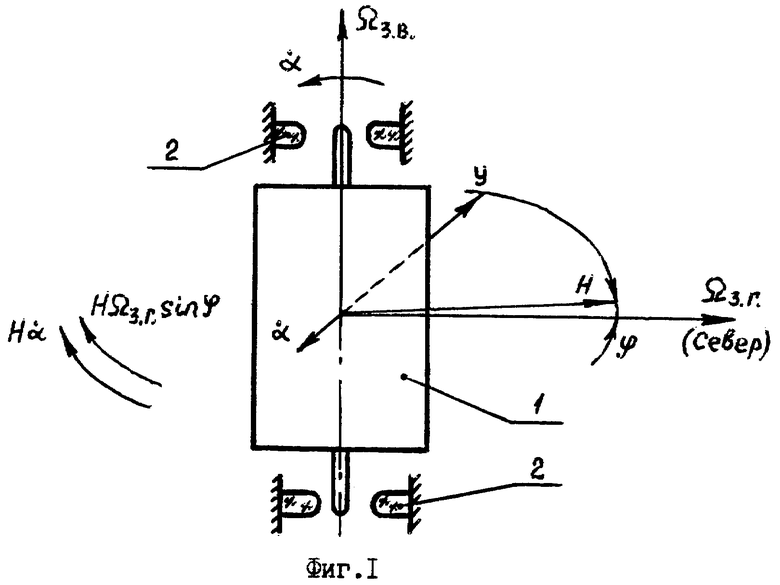
Способ определения направления географического меридиана, основанный на измерении тока обратной связи двухстепенного гироскопа, ось прецессии которого устанавливают в вертикальное положение, при этом измерение тока обратной связи производят в трех положениях оси вращения ротора гироскопа: в положении, близком направлению на Север, в положении, развернутом вокруг оси прецессии на 180°, и в положении, развернутом на 270°, причем установку оси вращения ротора гироскопа в каждое положение осуществляют непосредственно перед измерением тока обратной, связи путем разворотов гироблока вокруг оси прецессии, а по результатам измерений определяют положение направления меридиана, отличающийся тем, что, с целью повышения точности определения направления географического меридиана, развороты гироблока вокруг оси прецессии производят в направлении, противоположном направлению вертикальной составляющей угловой скорости суточного вращения Земли.
| Авт | |||
| св | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1977 |
|
SU1839795A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

