Настоящее изобретение относится к способам определения базового направления, связанного с меридианом. Эти способы применяются, например, в системах прицеливания баллистических ракет. Известен способ определения направления меридиана с помощью двухстепенного гироскопа с электромагнитной обратной связью от датчика угла к датчику момента (см. патент США кл. 33-226 от №3346966 "Способ измерения ошибок гирокомпаса"). При способе, изложенном в указанном патенте США, ось прецессии (ось подвеса) гироскопа выставляется в вертикальной плоскости, образованной осью мира и местной вертикалью и перпендикулярна оси мира, а ось чувствительности выставляется в направлении, близком к направлению оси мира. Использование показаний с двухстепенного гироскопа в таком положении имеет тот недостаток, что на точность показаний влияют составляющие уходов гироблока, зависящие от перегрузки, в особенности нестабильность этих составляющих за счет люфта в роторе гиромотора.
Другая особенность указанного способа заключается в том, что для исключения постоянных составляющих моментов тяжения и дебаланса замеры производят в двух положениях: 1) когда ось чувствительности близка к направлению запад-восток и 2) в положении, когда она разворачивается вокруг оси кинетического момента на 180° (направление, близкое к направлению восток-запад). Недостаток известного способа разворота заключается в том, что гироблок переворачивается относительно силы тяжести, что приводит при использовании, например, поплавковых гироблоков к возникновению перетекающих конвекционных потоков, могущих вызвать дополнительные ошибки. Третий недостаток известного способа заключается в том, что необходимо определение широты.
Целью предлагаемого изобретения является исключение указанных недостатков.
Сущность предлагаемого изобретения заключается в следующем. Двухстепенный гироблок (см. чертеж) с жесткой обратной связью от датчика угла прецессии к датчику моментов через усилитель и преобразователь в дискретный сигнал, преобразующий ток в датчике моментов в частоту импульсов, пропорциональную току обратной связи, устанавливается определенным образом.
Схема работы по предлагаемому способу изображена на чертеже. Ось прецессии (ось подвеса) гироблока 1, охваченного обратной связью с датчика угла 2 через усилитель 3 преобразователь в частоту 4 на датчик момента 5, выставляют вертикально по уровням 6, установленным на базовой площадке 7. Базовую площадку 7 вместе с корпусом гироблока разворачивают вокруг вертикальной оси 8 до получения сигнала с частотного выхода 9 гироблока 1, близкого к нулю, что характеризует положение оси кинетического момента, близкое к северному направлению. Для запоминания величины угла имеется точный дискретный датчик угла 10. В этом положении производят определение величины частотного выходного сигнала с гироблока со временем осреднения несколько десятков секунд (точность зависит от времени осреднения). Величину сигнала f1 запоминают. Затем производят разворот стола с гироблоком вокруг вертикальной оси на 180° с отсчетом угла по датчику 10. В новом положении производят определение выходной частоты с тем же самым временем осреднения, что и в первом положении f2. Затем стол с гироблоком разворачивают на 90° вокруг вертикальной оси и производят измерение выходной частоты f3 с целью определения масштаба, т.е. коэффициента пропорциональности между выходной частотой и угловой скоростью. При этом время третьего замера может быть меньше первого, так как требования к точности масштабного коэффициента меньше. Угол между направлением вектора кинетического момента в первом положении и направлением меридиана определяется по формуле

Формула (1) получена вычитанием двух уравнений (2 и 3), описывающих равновесие подвижной системы гироблока в 1-ом и 2-ом положениях и подстановкой уравнения (4) для третьего положения:


Угол α мал, поэтому принимается: sinα=α.
Мпар - вредные тяжения (паразитный момент);
ωз - угловая скорость вращения земли.
Коэффициент К определяется из третьего измерения частоты:

Так как угол α мал и sin(90°-α) изменяется на незначительную величину при изменении α в пределах до 1°, то принимается sin(90°-α)=1. Мпар определяется из сложения (2) и (3). Таким образом, в формулу (1) не входит величина кинетического момента H и широта места ϕ. Это позволяет определить направление меридиана в условиях, когда широта точно не известна (например, на подводной лодке) в отличие от известного способа.
С целью увеличения точности может быть произведено N замеров угла α, в результате точность возрастает в  раз.
раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1977 |
|
SU1839795A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1983 |
|
SU1840257A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО УГЛУ ПОВОРОТА КОРПУСА ГИРОБЛОКА | 2012 |
|
RU2513631C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА ПО ИЗМЕНЯЮЩИМСЯ ТОКАМ КОРРЕКЦИИ | 2012 |
|
RU2509979C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
| СПОСОБ АВТОНОМНОЙ АЗИМУТАЛЬНОЙ ОРИЕНТАЦИИ ПЛАТФОРМЫ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА НА ПОДВИЖНОМ ОСНОВАНИИ | 2013 |
|
RU2541710C1 |
| Способ определения азимута платформы трёхосного гиростабилизатора по отклонению угла поворота гироскопа от расчётного значения | 2016 |
|
RU2649063C1 |
| Азимутальная ориентация платформы трехосного гиростабилизатора | 2016 |
|
RU2630526C1 |
Изобретение относится к измерительной технике и может быть использовано для определения направления географического меридиана с помощью гироскопических приборов. Способ основан на использовании двухстепенного гироскопа с дискретной импульсной обратной связью. Гироскоп устанавливают его осью прецессии в вертикальное положение и производят измерение выходного сигнала с осреднением за определенное время в трех положениях вектора кинематического момента в азимуте: в положении, близком к направлению на север, и в положениях, развернутых на 180° и 90°.Техническим результатом является исключение постоянных тяжения в оси прецессии и необходимости определения широты и масштабного коэффициента. Повышение достоверности контроля и упрощение способа. 1 ил.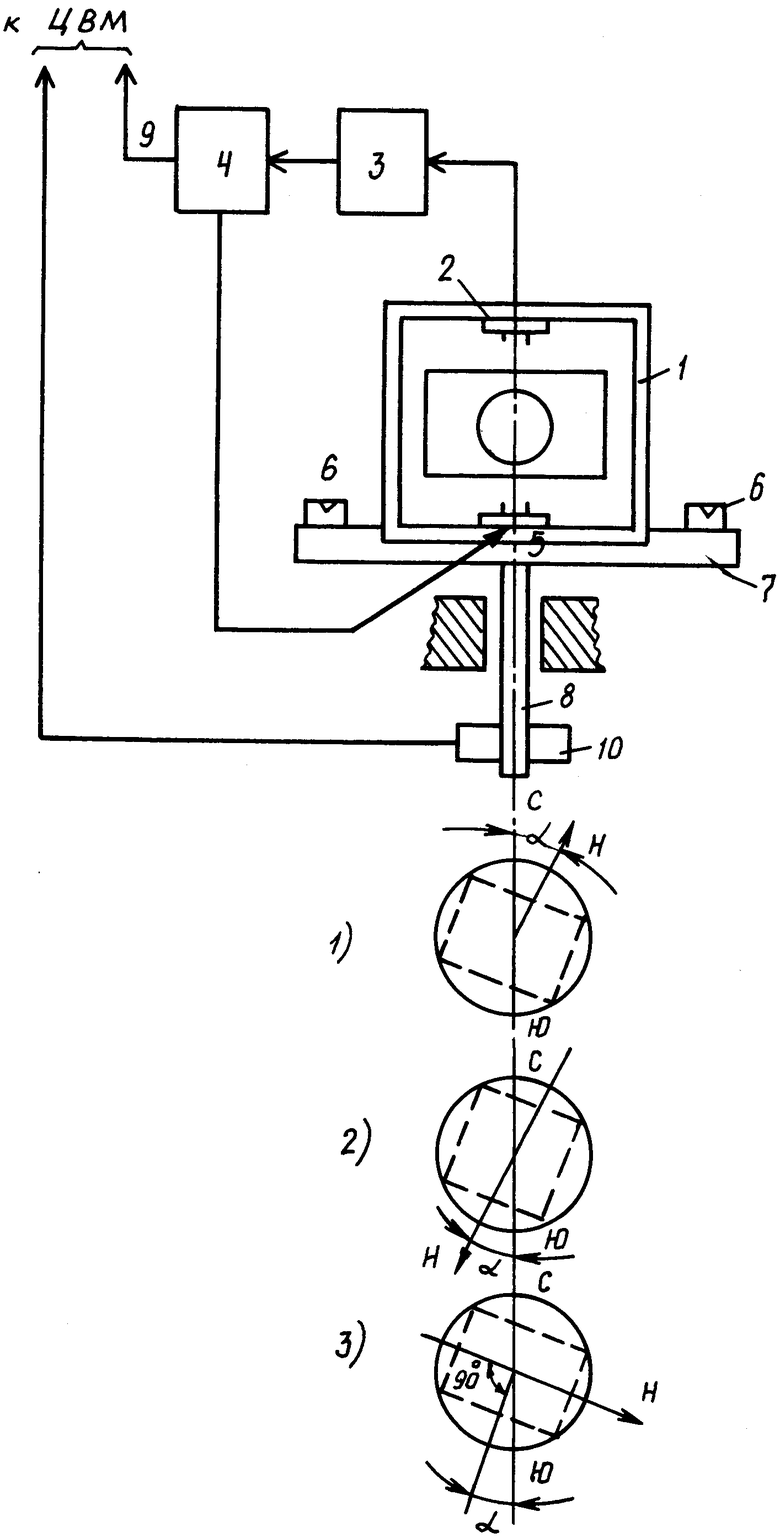
Способ определения направления географического меридиана, основанный на измерении отклонения двухстепенного гироскопа с обратной связью от датчика угла к датчику момента с преобразованием выходного тока датчика момента в частоту импульсов, отличающийся тем, что, с целью повышения точности, ось прецессии гироблока устанавливают в вертикальное положение и производят измерение его выходного сигнала с осреднением за определенное время в трех положениях; в положении, близком к направлению на север; в положении, развернутом на 180°; в положении, развернутом на 90°, и производят вычисление угла между первым положением вектора кинетического момента гироскопа и направлением меридиана.

