Изобретение относится к области приборостроения и может быть использовано при производстве поплавковых приборов, например двухстепенных интегрирующих гироскопов, являющихся чувствительными элементами систем навигации, ориентации и стабилизации.
При производстве прецизионных поплавковых гироскопов необходимо контролировать величину момента дифферента, приводящего к увеличению давления поплавка на центрирующие опоры и снижающего тем самым точность гироприбора. Известны способы определения дифферента поплавка, осуществляемые в технологической ванне, заполненной поддерживающей жидкостью при рабочей температуре гироприбора. Например, опущенный в ванну поплавок устанавливают в отверстия тяг двух граммометров и по полуразности их показаний судят о величине момента дифферента (см. книгу Ковалева М.П., Моржакова С.П., Терехова К.С. "Динамическое и статическое уравновешивание гироскопических устройств". М., 1974 г., стр.233).
Известен способ определения дифферента, при котором поплавок помещают в ванну из прозрачного материала, навешивают на поднимающуюся вверх цапфу контрольный грузик и по визуально наблюдаемому вращению поплавка вокруг его поперечной оси контролируют величину момента дифферента (см. там же, стр.229), это решение можно считать прототипом.
Существенным недостатком известного способа является неточность определения дифферента, вызываемая тем обстоятельством, что создание в технологической ванне температурных полей, аналогичных полям работающего гироприбора, невозможно. Вследствие этого измеренный момент дифферента отличается от реального момента, действующего на поплавок в собранном приборе.
Целью настоящего изобретения является повышение точности измерения дифферента гироприбора.
Указанная цель достигается тем, что вращение поплавка вокруг его поперечной оси под действием момента дифферента контролируют непосредственно в собранном и работающем гироприборе, для чего последний ориентируют измерительной осью перпендикулярно плоскости меридиана так, что существуют проекции вектора суточного вращения Земли на ось прецессии и вектора силы тяжести на ось кинетического момента гироскопа, а затем измеряют выходной сигнал гироприбора после каждого из двух его разворотов, совершаемых во взаимопротивоположных направлениях на 180° вокруг оси прецессии, и по величинам отрезков времени между окончанием разворота и скачкообразным изменением выходного сигнала определяют дифферент гироприбора.
Благодаря наличию радиальных зазоров в центрирующих опорах гироприбора, после окончания разворотов поплавок переплывает вокруг измерительной оси под действием проекций момента дифферента и гироскопического момента от проекции вектора суточного вращения Земли. При этом известный гироскопический момент суммируется с моментом дифферента после одного из разворотов и вычитается - после другого, что приводит к появлению разности скоростей вращения поплавка в пределах радиального зазора опор, и, следовательно, к разности времен переплывания поплавком последнего. Поскольку это вращение происходит вокруг измерительной оси гироприбора, то его прекращение вызывает скачкообразное изменение выходного сигнала, и выше названные времена переплывания легко поддаются измерению.
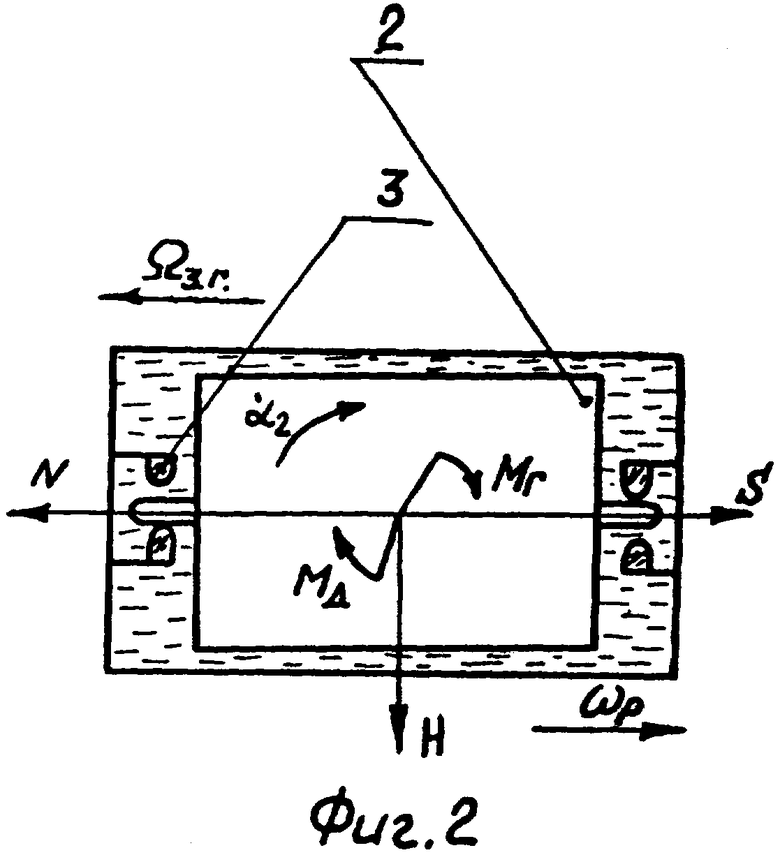
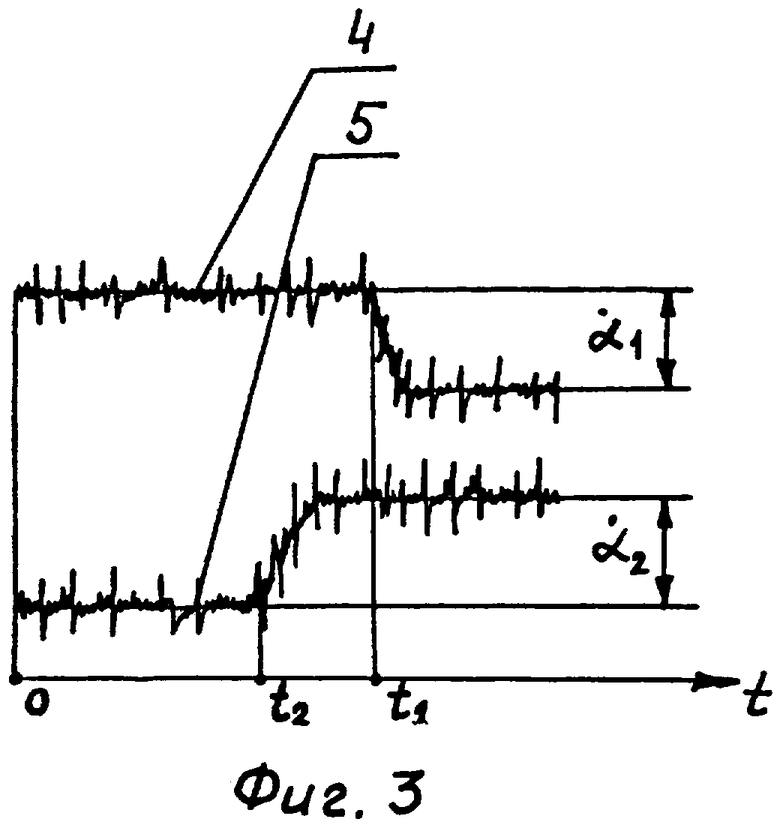
Предложенный способ поясняется чертежами. На фиг.1 показаны одна из возможных ориентаций гироприбора, а также относительное положение поплавка и действующие на него моменты после первого разворота, на фиг.2 - после второго разворота. На фиг.3 изображен вид выходного сигнала гироприбора после каждого его разворота.
Способ включает в себя следующие операции: работающий двухстепенный гироскоп 1, в котором поддерживается температура нулевой плавучести поплавка 2, ориентируют, например, осью прецессии по направлению "север-юг" и осью кинетического момента Н вертикально вниз. Затем гироскоп 1 разворачивают вокруг оси прецессии на 180° со скоростью ωр и начинают измерять его выходной сигнал (например, в режиме ДУСа). Возникающий в процессе разворота гироскопический момент Нωр забрасывает поплавок 2 относительно центрирующих опор 3 в положение, позволяющее ему после окончания разворота вращаться со скоростью  вокруг измерительной оси гироприбора в пределах радиального зазора δ опор 3. Это вращение происходит под действием разницы момента дифферента Мд и гироскопического момента Мг=Н Ωзг от горизонтальной составляющей суточного вращения Земли Ωзг (при выполнении условия Мд>Мг). Через определенный отрезок времени t1 с момента окончания разворота обуславливаемый демпфированием вращения поплавка поддерживающей жидкостью поплавок 2 касается цапфами камней опор 3 и прекращает свое движение вокруг измерительной оси; при этом выходной сигнал 4 скачкообразно изменяется. После этого гироприбор 1 разворачивают на 180° со скоростью ωр в противоположном направлении, и вращение поплавка 2 вокруг измерительной оси происходит уже под действием суммы моментов Мд и Mг с большей скоростью
вокруг измерительной оси гироприбора в пределах радиального зазора δ опор 3. Это вращение происходит под действием разницы момента дифферента Мд и гироскопического момента Мг=Н Ωзг от горизонтальной составляющей суточного вращения Земли Ωзг (при выполнении условия Мд>Мг). Через определенный отрезок времени t1 с момента окончания разворота обуславливаемый демпфированием вращения поплавка поддерживающей жидкостью поплавок 2 касается цапфами камней опор 3 и прекращает свое движение вокруг измерительной оси; при этом выходной сигнал 4 скачкообразно изменяется. После этого гироприбор 1 разворачивают на 180° со скоростью ωр в противоположном направлении, и вращение поплавка 2 вокруг измерительной оси происходит уже под действием суммы моментов Мд и Mг с большей скоростью  . Поэтому время t2 переплывания поплавком 2 радиального зазора опор 3 меньше, и скачок выходного сигнала 5 наступает скорее.
. Поэтому время t2 переплывания поплавком 2 радиального зазора опор 3 меньше, и скачок выходного сигнала 5 наступает скорее.
Указанное выше вращение поплавка 2 относительно корпуса гироприбора 1 после первого разворота описывается уравнением
 , а
, а
после второго - уравнением

где K - коэффициент демпфирования вращения поплавка вокруг его поперечной оси поддерживающей жидкостью (чисто моментная нагрузка поплавка обеспечивается поддержанием в гироприборе температуры нулевой плавучести). Из приведенных уравнений следует, что, учитывая соотношения

 ,
,
где l - расстояние между центрирующими опорами, момент дифферента Мд определяется через известный гироскопический момент Мг по формуле
Следует отметить, что если после разворотов, проведенных с указанными выше направлениями ωр скачкообразных изменений выходного сигнала не наблюдается (что возможно, например, при другом направлении Мд), то направления разворотов следует соответственно изменить на противоположные.
Предлагаемый способ был проверен экспериментально на двухстепенном поплавковом гироскопе с кинетическим моментом Н=2700 Г·см·с и коэффициенты K=0,8·106 Г·см·с и дал хорошие результаты. Среднее значение времени между окончанием первого разворота и скачкообразным изменением выходного сигнала составило 87 с, между окончанием второго разворота и изменением сигнала после него - 61 с. Согласно этим данным
Использование предлагаемого способа определения дифферента поплавкового гироприбора по сравнению с известными способами дает следующие преимущества:
- обеспечивает более точное определение дифферента;
- позволяет контролировать величину дифферента гироприбора на любых этапах его испытаний и эксплуатации;
- не требует дополнительного технологического оборудования (например, в виде специальных ванн).
На основе предложенного решения составлена инструкция контроля параметров прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1983 |
|
SU1840257A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1977 |
|
SU1839795A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ПОПЛАВКОВОЙ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2015 |
|
RU2591287C1 |
| Способ определения момента дифферента гирокамеры двухстепенного поплавкового гироскопа | 2018 |
|
RU2677091C1 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| СПОСОБ БАЛАНСИРОВКИ ГИРОКАМЕРЫ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА | 2016 |
|
RU2648023C1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕРИДИАНА | 1970 |
|
SU1840659A1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
Изобретение относится к области приборостроения и может быть использовано при производстве поплавковых приборов, например двухстепенных интегрирующих гироскопов. Работающий прибор ориентируют измерительной осью перпендикулярно плоскости меридиана, поворачивают на 180°, после чего измеряют его выходной сигнал, затем поворачивают в противоположную сторону на 180° и снова измеряют выходной сигнал, а момент дифферента вычисляют по величинам отрезков времени между окончанием разворота и скачкообразным изменением выходного сигнала. Техническим результатом является повышение точности. 3 ил.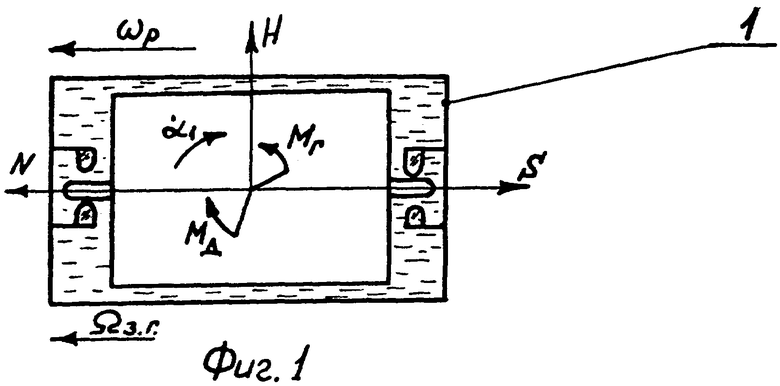
Способ определения момента дифферента двухстепенного поплавкового гироприбора, например интегрирующего гироскопа, по вращению поплавка вокруг его поперечной оси, отличающийся тем, что, с целью повышения точности, работающий прибор ориентируют измерительной осью перпендикулярно плоскости меридиана, поворачивают на 180°, после чего измеряют его выходной сигнал, затем поворачивают в противоположную сторону на 180° и снова измеряют выходной сигнал, а момент дифферента вычисляют по величинам отрезков времени между окончанием разворота и скачкообразным изменением выходного сигнала.
| Ковалев М.П | |||
| и др | |||
| "Динамическое и статическое уравновешивание гироскопических устройств", 1974 г., Машиностроение, стр.229 | |||
| Там же, стр.233. |

