Изобретение относится к области приборостроения и может быть использовано при определении направления географического меридиана с применением двухстепенного поплавкового гироскопа.
Известны способы определения направления географического меридиана, основанные на измерении отклонений двухстепенного гироскопа с обратной связью после разворотов его на фиксированные углы вокруг различных осей, в том числе и вокруг выходной оси (оси прецессии) (см. патент США №3.225.452, кл. G 01 C 19/38, 1962 г.). Известен также способ определения направления географического меридиана, основанный на измерении отклонений двухстепенного гироскопа с обратной связью после разворотов его вокруг выходной оси (оси прецессии), ориентированной вертикально, в три фиксированные положения.
Известный способ при использовании двухстепенного поплавкового гироскопа с камневыми опорами подвеса чувствительного элемента (поплавка) не учитывает дополнительную погрешность измеряемого параметра, возникающую из-за возможного углового перемещения чувствительного элемента вокруг его входной оси в пределах радиальных зазоров между сквозными камнями (втулками) и цапфами опор подвеса.
Целью настоящего изобретения является повышение точности определения направления географического меридиана.
Указанная цель достигается тем, что в способе, основанном на измерении отклонений двухстепенного поплавкового гироскопа, все развороты в процессе определения направления географического меридиана производят так, чтобы гироскопический момент, действующий на поплавок гироскопа при разворотах его вокруг оси прецессии совпадал по направлению с гироскопическим моментом, возникающим от проекции составляющей скорости вращения Земли на ось подвеса после окончания разворотов.
Такое направление разворотов исключает возможность перемещения поплавка вокруг входной оси в пределах радиальных зазоров опор подвеса. В процессе разворота прибора его чувствительный элемент - поплавок под действием гироскопического момента разворачивается вокруг входной оси на угол, ограниченный радиальными зазорами между цапфами и сквозными камнями опор подвеса до соприкосновения цапф с камнями. Дальнейшее угловое перемещение поплавка ограничивается реакцией опор. После окончания разворотов поплавок занимает то же самое положение за счет гироскопического момента от проекции вертикальной составляющей скорости вращения Земли, который по направлению совпадает с гироскопическим моментом, действовавшим при предшествующем развороте. Возможная ошибка от движения поплавка вокруг входной оси в пределах, ограниченных радиальными зазорами опор подвеса, исключается.
Предложенный способ поясняется фиг.1 и 2.
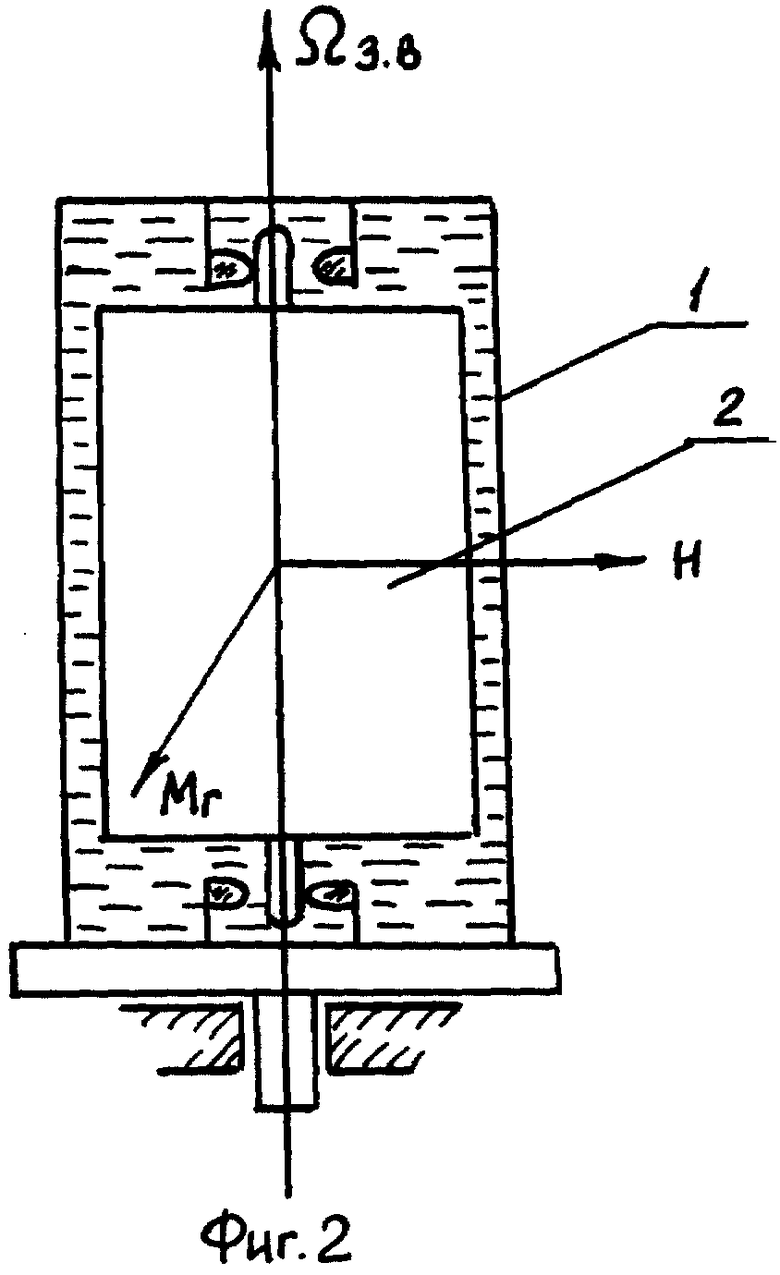
На фиг.1 показаны направления скоростей и моментов, действующих на поплавок, в процессе разворота гироскопа вокруг оси подвеса, а также относительное положение поплавка в конце разворота в плоскости  ,
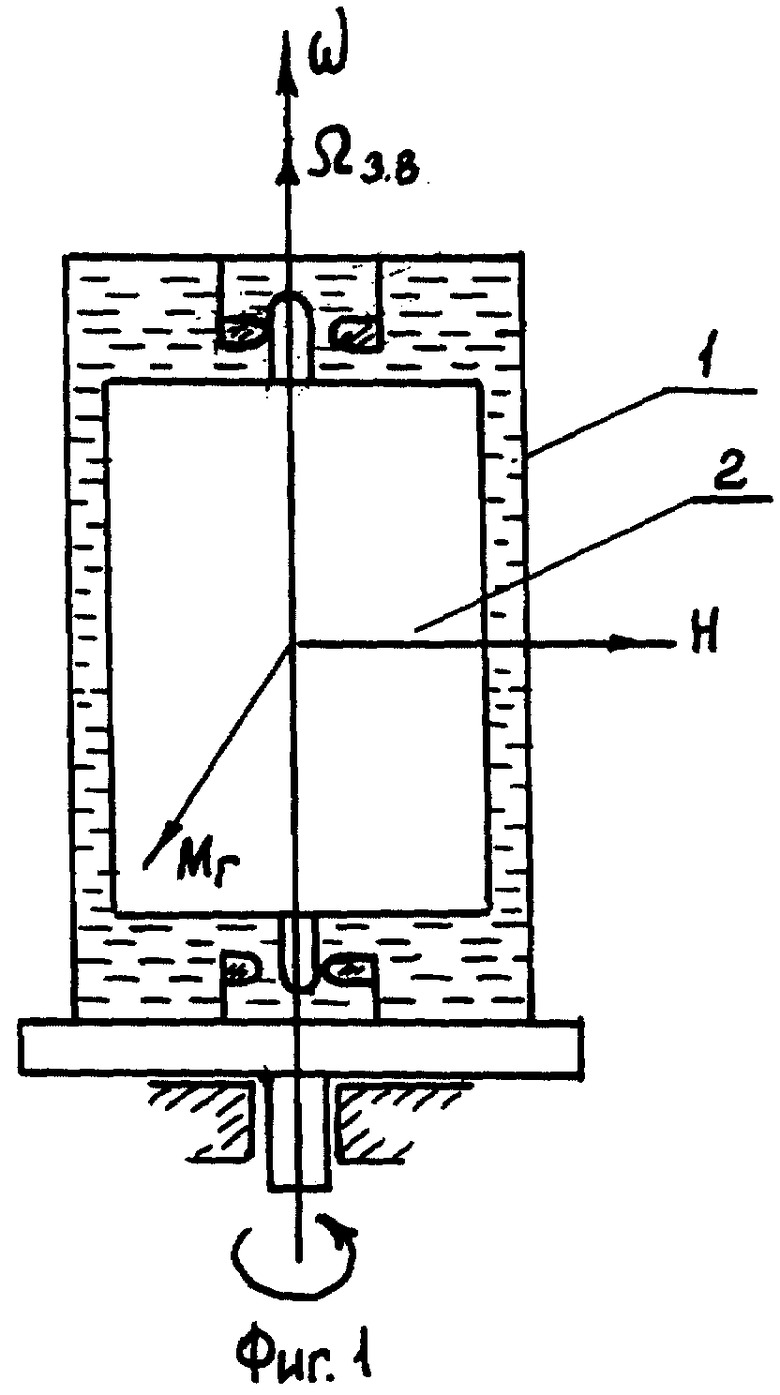
,  ; на фиг.2 - направления скоростей и моментов, действующих на поплавок после окончания разворотов гироскопа, а также положение поплавка (в плоскости
; на фиг.2 - направления скоростей и моментов, действующих на поплавок после окончания разворотов гироскопа, а также положение поплавка (в плоскости  ,
,  3B), ограниченное реакцией опор.
3B), ограниченное реакцией опор.
Способ предусматривает проведение следующих операций: работающий двухстепенный гироскоп 1, ориентированный, например, осью подвеса вертикально, перед проведением замеров по определению направления меридиана разворачивают вокруг оси подвеса поплавка 2 против часовой стрелки. При этом под действием гироскопического момента, равного Мг=Hω, поплавок развернется вокруг входной оси (перпендикулярной вектору кинетического момента) в пределах радиальных зазоров опор подвеса до соприкосновения цапф поплавка со сквозными камнями, как показано на фиг.1.
При проведении измерений по определению направления меридиана, когда по выходной оси гироскопа действует только проекция скорости вращения Земли, например, вертикальная составляющая, как показано на фиг.2, гироскопический момент Мг=НΩ3B, возникающий при этом, действует на поплавок в ту же сторону, что и гироскопический момент, действовавший в момент разворота гироскопа со скоростью  (см. фиг.1) и не вызывает относительного перемещения поплавка вокруг входной оси гироскопа, а следовательно, и погрешности, связанной с этим перемещением. Все последующие развороты гироскопа на фиксированные углы, необходимые для определения направления меридиана производят в направлении, показанном на фиг.1.
(см. фиг.1) и не вызывает относительного перемещения поплавка вокруг входной оси гироскопа, а следовательно, и погрешности, связанной с этим перемещением. Все последующие развороты гироскопа на фиксированные углы, необходимые для определения направления меридиана производят в направлении, показанном на фиг.1.
Использование предлагаемого способа определения направления географического меридиана с применением поплавковых гироскопов по сравнению с существующими способами позволяет исключить погрешность, связанную с перемещением поплавка гироскопа вокруг входной оси в процессе измерения.
Предлагаемый способ был проверен экспериментально на двухстепенном поплавковом гироскопе с кинетическим моментом Н=2700 гсм·с. Проверка показала, что стабильность прибора в запуске, определяющая точность измерения направления географического меридиана, повысилась в пять раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1983 |
|
SU1840257A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДИФФЕРЕНТА ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОПРИБОРА, НАПРИМЕР ИНТЕГРИРУЮЩЕГО ГИРОСКОПА | 1977 |
|
SU1840722A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ МЕРИДИАНА | 1970 |
|
SU1840659A1 |
| СПОСОБ ПОДВЕСА ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ПОПЛАВКОВОГО ПРИБОРА (ВАРИАНТЫ) И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ (ВАРИАНТЫ) | 2005 |
|
RU2276326C1 |
| Способ калибровки систематической составляющей угловой скорости дрейфа поплавкового гироскопа | 2024 |
|
RU2829458C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2112876C1 |
| Способ калибровки гироблоков платформы трехосного гиростабилизатора | 2020 |
|
RU2757854C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ И СПОСОБ КОМПЕНСАЦИИ ДРЕЙФА НУЛЕВОГО СИГНАЛА ГИДРОДИНАМИЧЕСКОГО ГИРОКОМПАСА | 2004 |
|
RU2270419C1 |
| Способ определения погрешности двухстепенного гироблока | 2016 |
|
RU2637186C1 |
Изобретение относится к области приборостроения и может быть использовано при определении направления географического меридиана с применением двухстепенного поплавкового гироскопа. Способ основан на измерении моментов, действующих на двухстепенный гироскоп, включенный в режим обратной связи. Ось прецессии гироблока устанавливают в вертикальное положение и производят измерения тока обратной связи датчика момента с осреднением за определенное время в трех положениях: в положении оси вращения ротора гироскопа, близком к направлению на Север, и в положениях, развернутых на 180 и 90°. Перед первым измерением производят разворот гироблока вокруг оси прецессии на 360° в направлении, совпадающем с вертикальной составляющей угловой скорости Земли. Последующие повороты также производят в этом направлении. Техническим результатом является повышение точности определения. 2 ил.
Способ определения направления географического меридиана, основанный на измерении моментов, действующих на двухстепенный гироскоп, включенный в режим обратной связи, при котором ось прецессии гироблока устанавливают в вертикальное положение и производят измерения тока обратной связи датчика момента с осреднением за определенное время в трех положениях: в положении оси вращения ротора гироскопа, близком к направлению на Север, в положениях, развернутых на 180 и 90°, и вычисляют угол между первым положением оси вращения ротора гироскопа и направлением меридиана, отличающийся тем, что, с целью повышения точности определения направления меридиана, перед первым измерением производят разворот гироблока вокруг оси прецессии на 360° в направлении, совпадающем с вертикальной составляющей угловой скорости Земли (против часовой стрелки в Северном полушарии), а последующие повороты гироблока также производят в этом направлении.
| Патент США, № 3.225.452, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

