Предлагаемое устройство - маховичный электропривод относится к области электротехники и может применяться в качестве исполнительного органа системы ориентации и стабилизации (СОС) космического аппарата (КА). Маховичный электропривод создает динамический момент, направление действия которого на корпус КА и величина определяется полярностью и величиной сигнала управления, поступающего из СОС. Скорость Ω двигателя-маховика изменяется по закону:
где Ω0 - начальное значение скорости, М∂ - динамический момент, Jм - момент инерции маховика и ротора двигателя. Динамический момент М∂=±Мэм-Мс, где Мэм - электромагнитный момент, Мс - момент сопротивления маховика. Обычно Мэм≫Мс. Величина Мс не постоянна, так как определяется трением в подшипниках двигателя, маховика о воздух, моментов, создаваемыми паразитными электромагнитными силами в двигателе и тахогенераторе. Для точных СОС, как правило, требуется пропорциональность зависимости динамического момента от величины сигнала управления. Это значит, что динамический момент не должен зависеть от скорости.
Учитывая эти общие сведения, рассмотрим известные аналоги, которые можно разбить на 2 группы.
Устройства с косвенным и непосредственным регулированием динамического момента. Во-первых, регулируется пропорционально величине сигнала управления электромагнитный момент, а динамический определяется разностью M∂=±Mэм-Мс. Отсюда видно, что высокоточное регулирование М∂ принципиально невозможно из-за того, что момент сопротивления Мс зависит от условий эксплуатации. Например, на Земле Мс=200-350 Гс см, а на орбите в условиях невесомости 50-100 Гс см. Если М∂=800-1000 Гс см, то при Мэм=const (что обеспечивается в устройствах регулированием тока, напряжения, частоты) нестабильность динамического момента достигает 10%. Кроме того, в устройствах регулируется не непосредственно величина M∂, а связанные с ним величины тока или напряжения и частоты. При этом имеется достаточно существенная погрешность (10-15% от M∂). Из-за действия указанных погрешностей точность косвенных методов регулирования M∂ невысока ±(10-15%) и в ряде случаев не удовлетворяет разработчиков СОС.
Устройства второй группы лишены указанных недостатков, свойственных устройствам первой группы, так как они основаны на измерении либо углового ускорения ε=d Ω/dt=M∂/Jм, пропорционального величине М∂, либо деформации упругих элементов, величина которых пропорционально связана с M∂. Однако эти устройства имеют крупные недостатки: непомерная сложность устройства и практическая непригодность его для регулирования малых значений M∂, близких к нулю; создание дополнительного момента сопротивления на валу двигателя-маховика и низкая чувствительность, малая механическая прочность и низкая надежность. Из-за этих недостатков устройства в бортовой космической технике не применяются.
Предлагаемое устройство не имеет отмеченных недостатков и обеспечивает точное регулирование динамического момента за счет того, что в состав маховичного электропривода введен цифровой интегратор, который задает угловое ускорение маховика, а следовательно, динамический момент.
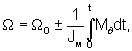
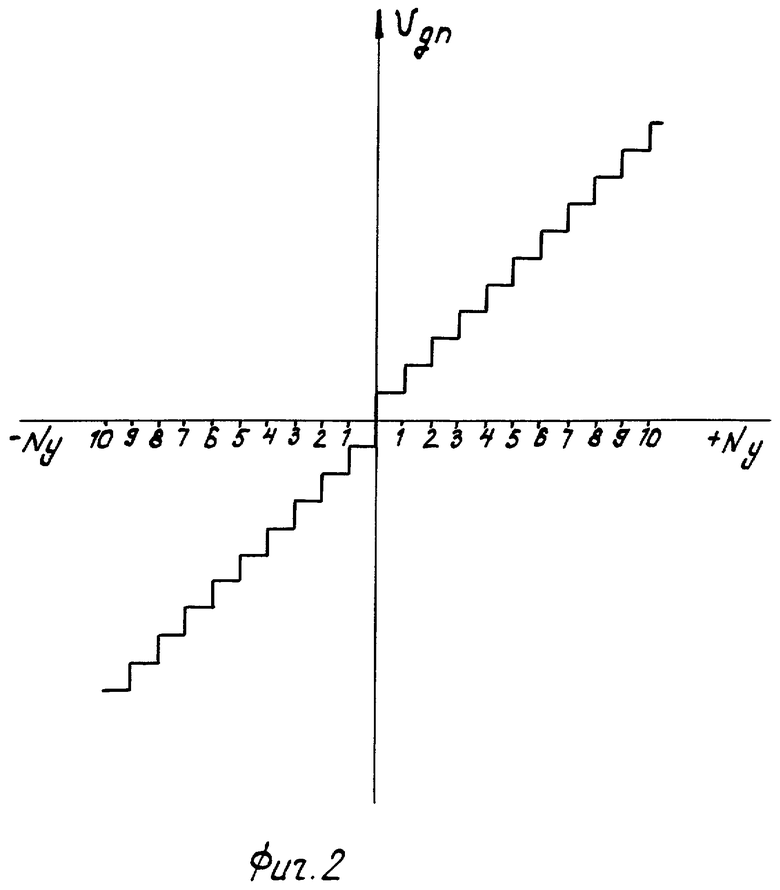
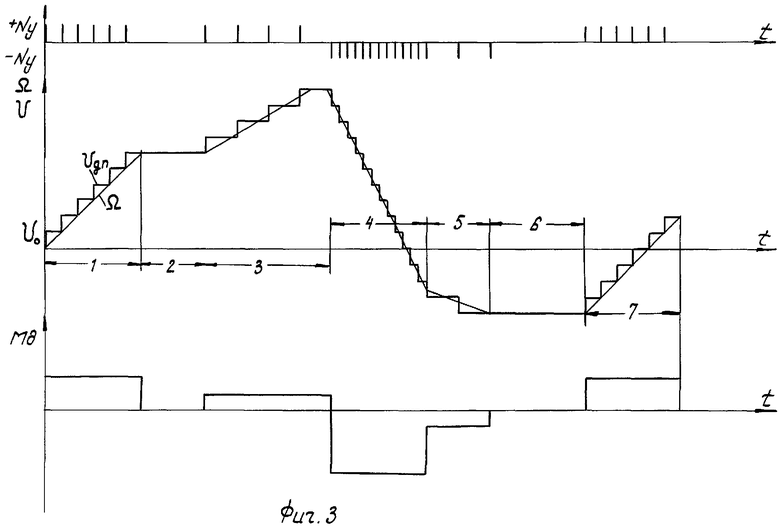
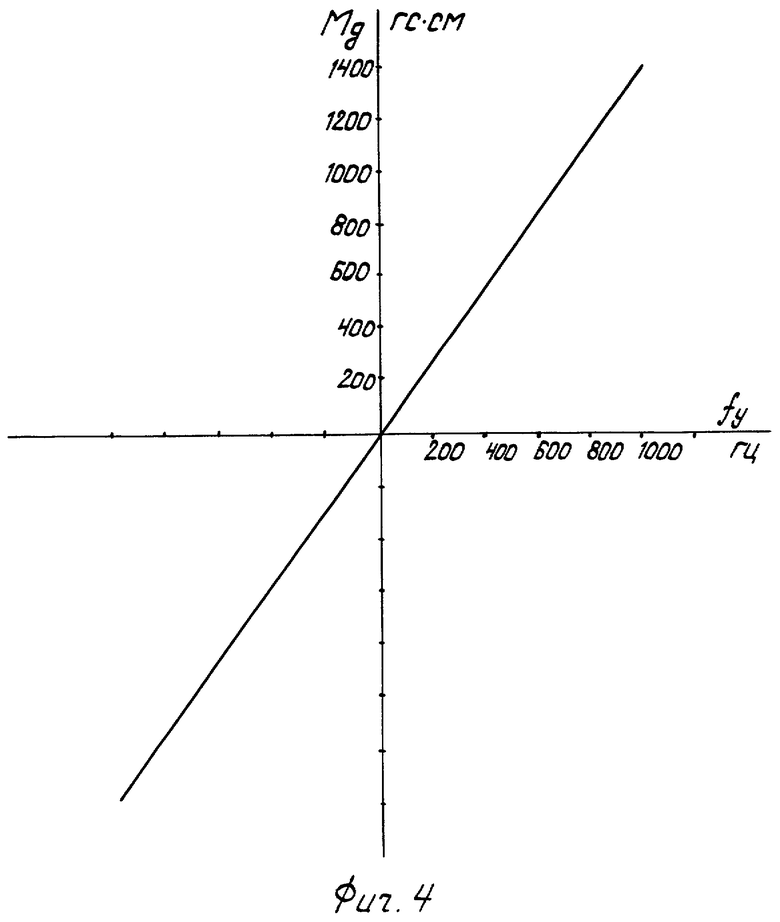
Блок-схема предлагаемого маховичного электропривода приведена на фиг.1. На фиг.2 показана зависимость выходного напряжения цифрового интегратора Ugп от числа импульсов управления Nу. На фиг.3 и 4 даны соответственно диаграммы изменения скорости и момента во времени и регулировочная характеристика М∂(fу), где fу частота импульсов сигнала управления.
Предлагаемый маховичный электропривод состоит (фиг.1) из двигателя-маховика 1, таходатчика 2, регулируемого статического преобразователя 3, усилителя напряжения 4, схемы сравнения 5 и цифрового интегратора, в который входят реверсивные счетчики 7, 14, имеющие n разрядов, схемы совпадения с двумя входами каждая 6, 8, 13, 15, схемы совпадения с n входами каждая 10, 16 схемы логического суммирования (ИЛИ) с n входами 9, 17, декодирующие преобразователи 12, 19, триггеры с раздельными входами 11, 18. Оригинальная часть на фиг.1 выделена пунктиром. Электропривод управляется импульсами, поступающими на входы 1 и 2. Величина динамического момента двигателя-маховика пропорциональна частоте fу импульсов управления.
Знак динамического момента зависит от того, на какой из входов поступают импульсы управления, если - на вход 1, то знак момента положительный, если - на вход 2, то знак момента отрицательный. Сигнал управления может быть задан и в другом виде. В этих случаях перед входами 1, 2 нужно ставить соответствующий преобразователь, выполненный по известным схемам. Например, если сигнал управления представляет напряжение, то необходим преобразователь напряжение-частота, схемы таких устройств известны.
Выходы реверсивного счетчика 7 соединены с входами схем совпадения типа И-НЕ 9, логического суммирования 10 и декодирующего преобразователя 12. Выходы аналогичного счетчика 14 подключены к входам схем совпадения И-НЕ 17 и логического суммирования ИЛИ 16 и декодирующего преобразователя 19. Выходы декодирующих преобразователей присоединены к входам схемы сравнения 5, на третий вход этой схемы поступает выход таходатчика 2. Реверсивные счетчики, как известно, имеют шины суммирования 20, 23 и шины вычитания 21, 22. Эти шины соединены с входами схем совпадения типа И на два входа: шины 20, 23 присоединяются к выходам схем И соответственно 6, 15; шины 21, 22 соединены с выходами схем И соответственно 8, 13. Схемы совпадения 6, 8; 13, 15 своими входами попарно подключены к входам управления 1, II электроприводом и к выходам триггеров 11, 18. Например, к входу 1 подключены входы схем 6 и 13, а к входу 2 - входы схем 8 и 15. Вторые входы схем 8 и 15 присоединены к выходам триггера 2; вторые входы схем 6 и 13 соединены с выходами триггера 18. Разноименные входы триггеров 11, 18 подключены попарно к выходам схем И-НЕ и ИЛИ соответственно 9, 10 и 17, 16: верхний (на фиг.1) и нижний входы триггера 2 соединены с выходами пары схем 9 и 10, а верхний и нижний входы триггера 18 - с выходами пары 16 и 17. Счетчики 7, 14 имеют по n разрядов, каждый, число разрядов зависит от требуемой дискретности выходных напряжений декодирующих преобразователей. Схемы И-НЕ 9 и 17, а также схемы ИЛИ 10, 16 имеют по n входов. Все узлы цифрового интегратора описаны в литературе и выпускаются в виде отдельных микросхем. Узлы 1-5 также известны, причем преднамеренно не оговаривается, какими именно должны быть по схеме усилитель напряжения 4 и регулируемый статический преобразователь 3, так как для существа предлагаемого изобретения это безразлично.
Рассмотрим, как работает предлагаемый маховичный электропривод. В исходном состоянии, когда на входах 1, 2 нет импульсов управления, счетчики 7, 14 находятся в исходном нулевом состоянии. На их выходы выдаются логические нули, например, в виде пониженного потенциала. На выходах схем ИЛИ 10, 16 - также логический 0. На выходах схем И-НЕ 9, 17 выдается логическая 1, например, в виде повышенного потенциала. Схемы 9, 17 устанавливают триггеры 11, 18 в состояние, при котором на выходах 25, 27 имеется логическая 1. Таким образом схемы совпадения 6, 15 подготовлены к пропуску импульсов с входов 1 и 2 на шины суммирования 20 и 23. Схемы 8 и 13, на выходы которых поступают 0 c выходов 24, 26 закрыты и не пропускают импульсы на шины вычитания 21, 22. Так как на входы декодирующих преобразователей 12, 19 приходят логические нули с выходов счетчиков 7, 14, то напряжения на выходах этих преобразователей равны нулю. Узлы 1-5 образуют следующую систему, для которой выходные напряжения декодирующих преобразователей являются сигналами задания скорости. Так как эти напряжения равны нулю, то и скорость Ω двигателя-маховика равна нулю, следовательно, динамический момент отсутствует.
Дальнейшая работа устройства зависит от того, на какой вход 1 или 2 поступят импульсы управления. Пусть они пришли на вход 1, что должно привести к возникновению динамического момента положительного знака. Так как схема 6 открыта, то счетчик 7 начинает суммирование импульсов. По крайней мере на одном из его выходов в любой момент времени имеется логическая 1. Значит, на выходе И-НЕ 9 будет 0, а на выходе ИЛИ 10 будет 1. При этом триггер 2 перебрасывается и на его выходе 24 появляется 1, а на выходе 25 - нуль. При этом схема И 8 открывается, а 15 закрывается. Весь этот процесс происходит в течение переднего фронта первого импульса управления на входе 1. Состояние триггера 18, а следовательно схем 13 и 6 не изменяется (13-закрыта, 6-открыта). На выходах счетчика 14 логические нули. Выходное напряжение Uдп декодирующего преобразователя 12 возрастает ступеньками (фиг.2) в положительном направлении. При этом следующая система начинает отрабатывать это напряжение, и скорость двигателя-маховика Ω возрастает в положительном направлении: участки 1,3 на фиг.3. Так как инерционность маховика велика, то скорость не успевает пульсировать с частотой ступенек напряжения Uдп и возрастает практически линейно. Предположим, что импульсы управления + Nу исчезли (участок 2 на фиг.3). В счетчике 7 сохраняется записанный код, а на выходе 12 постоянное напряжение. Скорость Ω стабилизируется на постоянном уровне Ω=const, следовательно динамический момент М∂=Jм·d Ω/dt=0. Пусть теперь знак управляющего сигнала изменился, т.е. вместо импульсов + Nу поступают импульсы - Nу на вход 2.
Эти импульсы через открытую схему И 8 поступают на шину вычитания 21. Код счетчика 7 и напряжение на выходе 12 уменьшаются (участок 4 на Фиг.3). Скорость двигателя понижается: следовательно, динамический момент изменяет знак: М∂<0. Так продолжается до тех пор, пока код счетчика 7 не примет нулевого значения. При этом Uдп= Ω=0. Как только в младший разряд счетчика 7 запишется 0, на выходе схемы 9 появится 1, которая перебросит триггер 2; на выходе 25 появится 1, a на выходе 24 - 0. Схема И 15 откроется, а 8 закроется. Значит, импульсы с входа 2 будут проходить на шину суммирования 23 счетчика 14. При записи кода в счетчик 14 на выходе схемы И-НЕ 17 появляется 0, а на выходе ИЛИ 16 появляется 1, которая перебрасывает триггер 18. На его выходе 26 появляется 1, на выходе 27 - нуль. Поэтому схема И 13 открывается, а схема И 6 закрывается. В таком состоянии накапливание кода производит счетчик 14, а в счетчике 7 остается нулевое состояние. На выходе декодирующего преобразователя 19 возрастает напряжение отрицательной полярности. Поэтому скорость двигателя-маховика изменяет знак на обратный ( Ω<0) и возрастает в отрицательном направлении. Динамический момент М∂=Jмd(- Ω)/dt<0, т.е. на всем участке 4 фиг.3 он имеет отрицательный знак, что соответствует знаку сигнала управления. Если последний примет нулевое значение, то наступает стабилизация скорости Ω, как и в предыдущем случае. Если знак сигнала управления изменится на положительный (появятся импульсы + Nу), то, как в предыдущем случае, код в счетчике 14 и напряжение на выходе схемы 19 уменьшаются до 0, в момент нулевого состояния счетчика 19 триггер 18 перебрасывается, открывая схему 6, и начинается накопление кода в счетчике 7. На выходе схемы 12 возрастает напряжение положительной полярности. Отрицательные значения скорости Ω уменьшатся до 0, а затем двигатель разгоняется в положительном направлении. Динамический момент имеет положительный знак (участок 7 на фиг.3). Выходное напряжение декодирующего преобразователя
Uдп=U0·fу·t,
где U0 - величина ступеньки на фиг.3. Если пренебречь статизмом следящей системы, то Ω=К Ω·Uдп=К Ω·U0·fу·t. Значит M∂=d Ω/dt=K Ω·U0·fу, т.е. точно пропорционален частоте импульсов управления. Изменяя f у можно регулировать линейно величину М∂ в самых широких пределах, как показано на фиг.4.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕХОСНОЙ СТАБИЛИЗАЦИИ КОСМИЧЕСКОГО АППАРАТА | 1979 |
|
SU1839975A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ-МАХОВИКОМ | 1980 |
|
SU1840113A1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ МОМЕНТОМ ДВИГАТЕЛЯ-МАХОВИКА | 2012 |
|
RU2521617C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА С КОНТРОЛЕМ ПАРАМЕТРОВ ВЫХОДНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК | 2021 |
|
RU2789698C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ДВОЙНОЙ ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2037263C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| СПОСОБ КОМПЛЕМЕНТАРНО-ФАЗОВОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 2010 |
|
RU2414801C1 |
Изобретение относится к области электротехники и может быть использовано в качестве исполнительного органа системы ориентации и стабилизации космического аппарата. Техническим результатом является повышение точности регулирования динамического момента двигателя. Устройство содержит датчик, статический преобразователь, усилитель, схему сравнения и логический блок с шинами управления. Для достижения указанного технического результата логический блок снабжен цифровым интегратором, состоящим из двух реверсных многоразрядных счетчиков, четырех двухвходовых элементов И, двух элементов И-НЕ, двух триггеров и двух декодирующих преобразователей. 4 ил.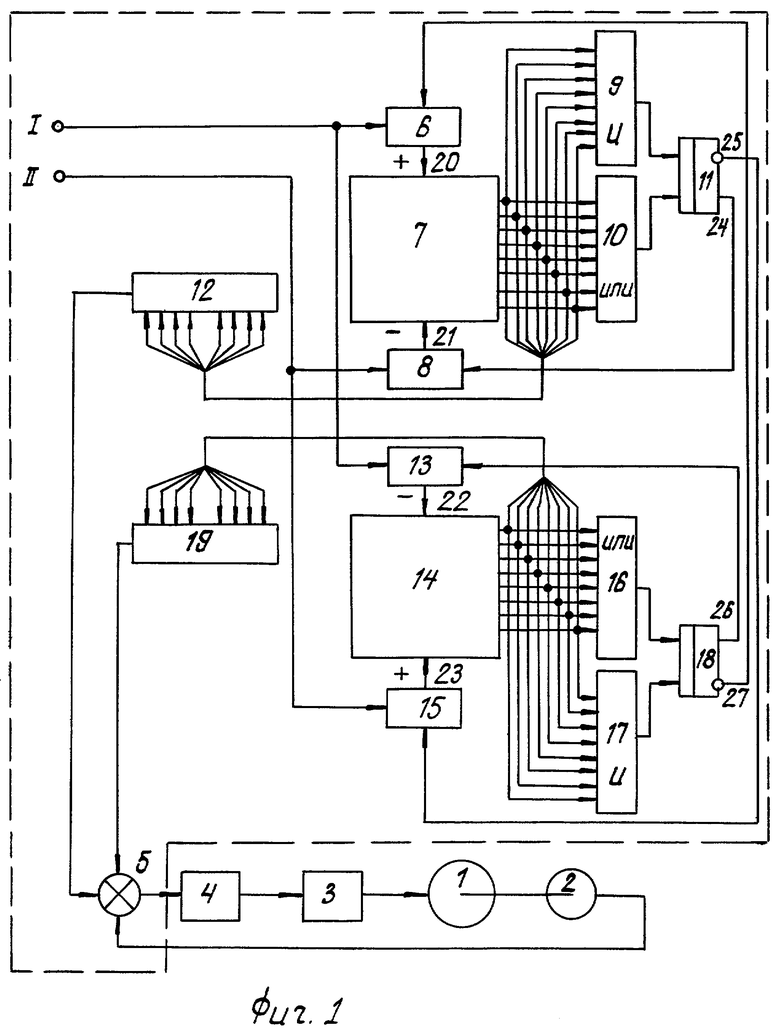
Устройство управления двигателем-маховиком, содержащее датчик, соединенный с двигателем, статический преобразователь подключенный через усилитель к схеме сравнения, к одному из входов которой подключен выход датчика, а к другим входам - логический блок с шинами управления, отличающееся тем, что с целью повышения точности регулирования динамического момента двигателя в системе ориентации и стабилизации космического аппарата, логический блок снабжен цифровом интегратором, состоящим из двух реверсивных многоразрядных счетчиков, четырех двухвходовых элементов И, двух элементов И-НЕ, двух триггеров и двух декодирующих преобразователей, включенных на выходе логического блока, причем выходы счетчиков подключены к входам элементов И-НЕ, ИЛИ и декодирующих преобразователей, а входы вычитания и суммирования упомянутых счетчиков соединены с выходом элементов И, входы которых попарно подключены к шинам управления и выходам триггеров, включенных на выходе элементов И-НЕ и ИЛИ каждого счетчика.

