Изобретение относится к электромеханике, в частности к устройствам формирования динамических моментов управляющих двигателей-маховиков (УДМ), применяемых в качестве электромеханических исполнительных органов в системах управления угловым положением космических аппаратов (КА) в орбитальной системе координат.
Исходя из функционального назначения УДМ задачей прибора является создание управляющего (динамического) момента пропорционально входному коду управления:
Mд=kNy,
где Мд - динамический момент;
k - крутизна моментно-регулировочной характеристики;
Ny - входной код управления.
В соответствии с формулой

где Мд - динамический момент;
J - момент инерции ротора;

Управление динамическим моментом сводится к управлению ускорением 
В настоящее время применяются, в основном, устройства управления ускорением, регулирующие фазные токи двигателя, и, следовательно, его электромагнитный момент. В этом случае динамический момент определяется следующим соотношением:
Мд=Мэм-Мс,
где Мэм - электромагнитный момент двигателя;
Мс - момент сопротивления вращению ротора.
Не имея обратной связи по ускорению ротора, эти устройства имеют большую погрешность из-за паразитного момента сопротивления, а также из-за нелинейности моментной характеристики двигателя.
Момент сопротивления вращению существенно зависит от таких параметров, как технология изготовления, качество опорных подшипников, нагрузка на подшипники, вязкость смазки, давление окружающей среды, температура, время наработки и т.д.
При малом отношении управляющего момента к моменту сопротивления нестабильность Мс оказывает существенное влияние на погрешность формирования динамического момента, что в свою очередь ухудшает качество управления положением КА.
Также немаловажными для УДМ являются его динамические характеристики. В ряде случаев время установления управляющего момента до величины 0,95 Мд max должно быть не более 20 мс.
При косвенном управлении динамическим моментом (при регулировании токов в фазах двигателя) влияние нестабильности Мc ничем не компенсируется.
Известно устройство управления двигателем-маховиком [1], в котором управление динамическим моментом осуществляется за счет того, что в состав маховичного электропривода введен цифровой интегратор (что обеспечивает первый порядок астатизма системы), который задает угловое ускорение маховика по сигналам управления динамическим моментом. Недостатками данного устройства являются:
отсутствие начальной синхронизации значений интегратора со скоростью вращения двигателя при включении питания, переключении с основного канала управления на резервный или при возникновении сбоев в бортовой системе электропитания;
зона нечувствительности в области низких скоростей вращения и малых управляющих моментов, что вызвано моментом сопротивления и дискретностью датчика скорости;
недопустимо большое время переходного процесса и ступенчатость переходной характеристики.
Известен способ повышения точности управления моментом двигателя-маховика [2]. Здесь так же, как и в [1], применена астатическая система управления динамическим моментом УДМ. Однако сигнал на входе регулятора тока в данном случае складывается из составляющей, пропорциональной входному сигналу, и составляющей, пропорциональной накопленной сумме разностей между расчетной и измеренной скоростями. Предложено задать коэффициент усиления в контуре коррекции переменным в зависимости от текущего состояния системы (по сути от первой разности измеренной скорости). Недостатки такого устройства аналогичны отмеченным для устройства [1].
Наиболее близким по своей технической сущности к заявляемому способу является прецизионная частотно-фазовая система регулирования скорости бесконтактного двигателя постоянного тока (БДПТ) [3], позволяющая точно отрабатывать заданные скорости вращения двигателя в широком диапазоне, особенно в области низких скоростей вплоть до нулевых.
Целью изобретения является создание способа управления динамическим моментом (ускорением ротора УДМ) в широком диапазоне скоростей вращения маховика вплоть до нулевой, обеспечивающего пропорциональную зависимость выходного управляющего (динамического) момента от входного сигнала управления и при этом лишенного отмеченных для аналогичных устройств недостатков.
Поставленная цель достигается с помощью применения принципа, заложенного в устройстве регулирования частоты вращения [3] в сочетании с эталонной цифровой моделью (ЭЦМ) УДМ и контуром синхронизации ее начальных значений частоты и фазы с текущими координатами двигателя. Такой способ позволяет получить от УДМ требуемые параметры по крутизне моментно-регулировочной характеристики в требуемом диапазоне скоростей вращения, т.к. отработка сигнала управления идет в соответствии с сигналами эталонной цифровой модели и любое отклонение от этих сигналов автоматически компенсируется. При этом контур начальной синхронизации позволяет устранить недопустимые рывки динамического момента во время включения питания при скорости вращения ротора УДМ, отличной от нулевой, и при переключении во время эксплуатации прибора с основного канала управления на резервный. В данном способе также устранена ступенчатость переходного процесса установления динамического момента. За счет применения ЭЦМ УДМ порядок астатизма системы управления динамическим моментом повышается до второго, что позволяет существенно повысить ее точность. Для улучшения динамики системы и обеспечения требуемых параметров по быстродействию и перерегулированию ток двигателя формируется не только из сигнала рассогласования между ЭЦМ и УДМ, но и сигнала, пропорционального коду управления. При такой структуре контур с ЭЦМ выполняет функцию коррекции токов двигателя с целью достижения синхронности сигналов ЭЦМ и датчика положения ротора (ДПР) УДМ в то время, как сигнал, пропорциональный коду управления, задает основное значение тока в фазах двигателя.
На фиг.1 представлена обобщенная структурная схема устройства, поясняющая принцип действия заявляемого способа.
В ее состав входят: эталонная цифровая модель управляющего двигателя-маховика ЭЦМ, преобразователи частот ПЧ1, ПЧ2, генератор опорной частоты ГОЧ, частотно-фазовый дискриминатор ЧФД, корректирующее устройство КУ, устройство коммутации контуров УКК, управляющий двигатель-маховик УДМ (в состав которого входят бесконтактный двигатель постоянного тока БДПТ, датчик положения ротора ДПР, регуляторы тока РТ), ключи K1, К2.
В контур I представленного на фиг.1 устройства входят ЧФД, КУ, УДМ, ПЧ1, К2. Принцип действия преобразователя частоты основан на тригонометрических соотношениях, а задачей является сложение гармонических частот ±ωвр (знак ωвр определяется направлением вращения), пропорциональной скорости вращения УДМ с опорной частотой ωО, вырабатываемой ГОЧ, и выделение из суммарной гармонической частоты ωО±ωвр импульсов с частотой ƒО±ƒвр (при этом может быть выделено от 1 до k: импульсов за один период частоты ωО±ωвр). Детально процедура преобразования частоты изложена в [3]. Также следует отметить, что для упрощения системы тригонометрические операции могут быть заменены на иные операции, позволяющие производить сложение различных частот с большой точностью.
Импульсы с суммарной частотой ƒО±ƒвр подаются на вход ЧФД, на другой вход которого подается частота ƒО±ƒЗ, аналогичным образом полученная в ПЧ2.
Задающая частота ±ωЗ вырабатывается ЭЦМ (в виде ортогональных гармонических сигналов или кода углового положения ротора с частотой ωЗ), на вход которой через замкнутые контакты 1 и 2 ключа К1 подаются управляющие сигналы динамического момента Ny. В состав модели входят два последовательно соединенных интегратора, первый из которых формирует мгновенное значение частоты ωЗ с темпом изменения (ускорением), пропорциональным входному сигналу управления, а второй преобразует эту частоту в мгновенное значение фазы (углового положения) φЗ ротора УДМ. В случае использования тригонометрических соотношений для сложения частот выход второго интегратора модели соединяется с конвертором фазы в амплитуду, преобразующим входной пилообразный сигнал в ортогональные гармонические сигналы.
При равенстве коэффициента передачи первого интегратора модели и аналогичного параметра двигателя 
Для согласования начальных значений ЭЦМ с текущей скоростью и угловым положением ротора, т.е. принудительной синхронизацией (например, при включении устройства на вращающийся маховик) структурная схема устройства переключается с помощью УКК: контакты 1 и 2 и 4 и 5 размыкаются, а контакты 1 и 3, 4 и 6 замыкаются. При этом контур I размыкается и замыкается контур II. Вход УДМ при этом замыкается на нуль, а сигнал управления динамическим моментом Ny отключается от входа модели.
Контур II аналогичен контуру I, только в нем УДМ заменен на ЭЦМ УДМ. Поэтому он уравнивает частоту ωЗ с частотой ωвр, при этом последняя в данном случае является задающей. Коэффициент передачи первого интегратора модели при замыкании контура II скачком увеличивается до максимально допустимой величины с целью ускорения синхронизации.
После приведения параметров выхода модели по частоте и фазе с соответствующими параметрами вращения УДМ производится обратное переключение контуров в режим управления динамическим моментом: замыкаются контакты 1 и 2, 4 и 5 и размыкаются 1 и 3, 4 и 6. Коэффициент передачи первого интегратора модели непосредственно перед коммутацией контура I скачком устанавливается в прежнее значение, соответствующее аналогичному параметру двигателя.
Для определения моментов коммутации контуров в УКК используются сигналы с выхода ЧФД. Характеристика ЧФД приведена к симметричному относительно начала координат виду, необходимому для управления УДМ в обоих направлениях. На фиг.2,а представлен один из n возможных участков многозначной логической нелинейности характеристики ЧФД. Рабочим участком характеристики, на котором идет управление динамическим моментом, является его линейный участок А1В1, выбранный с запасом по отношению ко всей линейной зоне АВ (для исключения случайных переключений в режим синхронизации), в пределах которого необходимый для управления сигнал рассогласования ΔU обеспечивается за счет разности фаз входных импульсов при равенстве их частот. Этот же сигнал рассогласования ΔU используется для переключения контуров. Он подается на УКК с гистерезисом, функция переключения которого показана на фиг.2,б. Его выходными сигналами являются сигналы управления ключами К1 и К2 - У1 и У2 соответственно. На фиг.2,а горизонтальными штрихпунктирными линиями отмечены пороговые значения ΔU (ΔUcpaб+, ΔUcpaб-, ΔUотп+, ΔUотп-), соответствующие моментам перехода УКК из одного состояние в другое.
При выходных управляющих сигналах УКК У1=У2=0 работает основной контур I управления динамическим моментом, рабочая точка которого перемещается по характеристики ЧФД в пределах отрезка А1В1.
Выход рабочей точки за пределы этого участка и переход на горизонтальную часть характеристики, указывающий на рассогласование частот, вызывает переключение управляющих сигналов УКК в состояние У1=У2=1, при котором размыкается основной контур I и замыкается контур синхронизации II. При совмещении координат модели в части частоты и фазы с соответствующими координатами УДМ рабочая точка на характеристике ЧФД перемещается в окрестность точки начала координат (отрезок A2B2), и УКК переключается в положение У1=У2=0, замыкая основной I и размыкая дополнительный II контур системы.
УКК также может выполнять функцию переключения режима работы всей системы управления из режима управления электромагнитным моментом с постоянной синхронизацией координат модели с УДМ и готовностью к коммутации контура коррекции (У1, У2 установлены в 1 даже после окончания синхронизации) в режим управления по динамическому моменту (У1=У2=0).
Вследствие того, что координаты УДМ при работе контура I всегда согласованы с координатами ЭЦМ, обеспечивается возможность точной стабилизации скорости вращения маховика (при подаче кода управления Ny=0 на определенной скорости вращения последняя фиксируется и остается неизменной вплоть до подачи нового кода управления, отличного от нуля, момент сопротивления при этом компенсируется с помощью необходимой величины фазного тока).
Проведены испытания [4] устройства управления динамическим моментом УДМ, которые показали принципиальную практическую возможность создания устройства управления динамическим моментом, основанного на заявляемом способе, с малой (менее 0,3%) погрешностью крутизны моментно-регулировочной характеристики в требуемом диапазоне скоростей вращения маховика и хорошими показателями динамики системы (время переходного процесса менее 15 мс, перерегулирование менее 3%) во всем диапазоне управляющих моментов.
Таким образом, способ основан на прецизионной частотно-фазовой системе регулирования скорости с переносом частоты, в котором применяют эталонную цифровую модель двигателя-маховика в качестве источника задающей фазы и частоты и второй дополнительный контур, выполняющий функцию начальной синхронизации интеграторов модели с реальными выходными координатами двигателя, переключение с основного на дополнительный контур и наоборот осуществляют с помощью устройства коммутации контуров по сигналам с выхода частотно-фазового дискриманатора, ток двигателя формируют из сигнала управления динамическим моментом и сигнала фазного рассогласования между выходными сигналами эталонной цифровой модели и сигнала датчика положения ротора.
Литература
1. Патент на изобретение РФ №1840286, МПК Н02Р 7/28, 07.01.1977. НПЦ «Полюс», Лянзбург В.П., Зенков А.К.
2. Повышение точности управления моментом двигателя-маховика. / Якимовский Д.О. // Гироскопия и навигации. - 2008. - №3 (62) - С.46-52.
3. Патент на изобретение РФ №2004132669, МПК Н02Р 1/00, 09.11.2004. ФГУП «НПЦ «Полюс», Муравяткин Ю.Е., Редькин С.В., Авдиевич А.С.
4. Отчет технический ЕИЖА. 468332. 581 Д7.1 Результаты ЛОИ модуля управления динамическим моментом УДМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА С КОНТРОЛЕМ ПАРАМЕТРОВ ВЫХОДНЫХ МЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК | 2021 |
|
RU2789698C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОГО МОМЕНТА УПРАВЛЯЮЩЕГО ДВИГАТЕЛЯ-МАХОВИКА | 2020 |
|
RU2736411C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2609673C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМИ ТЯГОВЫМИ ДВИГАТЕЛЯМИ, ПОДКЛЮЧЕННЫМИ ПАРАЛЛЕЛЬНО К ОДНОМУ ИНВЕРТОРУ | 2010 |
|
RU2428326C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЗЕНИТНОГО УГЛА И АЗИМУТА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 2012 |
|
RU2507392C1 |

Изобретение относится к области электротехники и может быть использовано в системах управления угловым положением космических аппаратов в орбитальной системе координат. Техническим результатом является обеспечение управления динамическим моментом двигателя-маховика с большой точностью от нулевого до максимального во всем диапазоне рабочих скоростей вращения маховика. В способе управления динамическим моментом двигателя-маховика, основанным на прецизионной частотно-фазовой системе регулирования скорости бесконтактного двигателя постоянного тока, применяют эталонную цифровую модель двигателя-маховика в качестве источника задающей фазы и частоты и второй дополнительный контур, выполняющий функцию начальной синхронизации интеграторов модели с реальными выходными координатами двигателя. Переключение с основного на дополнительный контур и наоборот производится устройством коммутации контуров по сигналам с выхода частотно-фазового дискриминатора. С помощью устройства коммутации контуров обеспечивается возможность функционирования в режиме управления как электромагнитным, так и динамическим моментами. Ток двигателя формируют из сигнала управления динамическим моментом и сигнала фазного рассогласования между выходными сигналами эталонной цифровой модели и сигналами датчика положения ротора. 2 ил.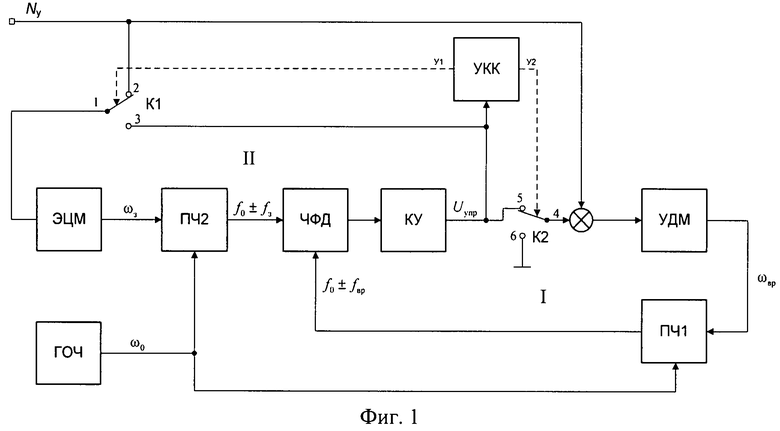
Способ управления динамическим моментом двигателя-маховика, основанный на прецизионной частотно-фазовой системе регулирования скорости, отличающийся тем, что применяют эталонную цифровую модель двигателя-маховика в качестве источника задающей фазы и частоты и второй дополнительный контур, выполняющий функцию начальной синхронизации интеграторов модели с реальными выходными координатами двигателя, переключение с основного на дополнительный контур и наоборот осуществляют с помощью устройства коммутации контуров по сигналам с выхода частотно-фазового дискриминатора, ток двигателя формируют из сигнала управления динамическим моментом и сигнала фазного рассогласования между выходными сигналами эталонной цифровой модели и сигналами датчика положения ротора.
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| СПОСОБ ПРОГРАММНОГО ПОЗИЦИОННОГО УПРАВЛЕНИЯ МНОГОФАЗНЫМ ШАГОВЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ЭЛЕКТРИЧЕСКИМ ДРОБЛЕНИЕМ ШАГА | 1990 |
|
RU2020725C1 |
| СПОСОБ ПОЛУЧЕНИЯ ВРАЩАЮЩЕГО МОМЕНТА ДЛЯ БЕСКОНТАКТНЫХ ИНДУКТОРНЫХ ВЕНТИЛЬНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2234793C1 |
| SU 1846286 А1, 27.08.2006 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ-МАХОВИКОМ | 1980 |
|
SU1840113A1 |
| US 6429614 B1, 06.08.2002 | |||
| ГЕЛЬ, СОДЕРЖАЩИЙ ПО МЕНЬШЕЙ МЕРЕ ОДИН РЕТИНОИД И ПЕРОКСИД БЕНЗОИЛА | 2002 |
|
RU2320327C2 |

