Изобретение относится к техническим средствам изучения и анализа режимов работы динамически настраиваемых гироскопов в составе двухосных индикаторных гироскопических стабилизаторов, а также для анализа технических характеристик гироскопа в лабораторных условиях.
Известен аналог – двухосный индикаторный стабилизатор (Лысов А.Н. Теория гироскопических стабилизаторов: учебное пособие / А.Н Лысов, А.А. Лысова. – Челябинский издательский центр ЮУрГУ, 2009. – 117с.), построенный на динамически настраиваемом или шаровом гироскопе, по осям подвеса которого установлены датчики углов и датчики моментов. Гироскоп установлен в кардановом подвесе, состоящем из внутренней рамы (платформы) и внешней рамы, по осям подвеса которых установлены стабилизирующие моторы (двигатели моментные), соединенные через усилители с соответствующими датчиками угла гироскопа.
Недостатком аналога является заниженная функциональность, которая позволяет демонстрировать и анализировать только контуры индикаторной стабилизации.
Известны динамически настраиваемые гироскопы (Динамически настраиваемые гироскопы : учеб. пособие для студ. вузов / Г.М. Виноградов, С.В. Кривошеев; Мин-во образ-я и науки РФ; Фед. агентство по образованию; КГТУ им. А.Н. Туполева. – Казань: Изд-во КГТУ им. А.Н. Туполева, 2008. – 128 с. – URL: http://elibs.kai.ru/_docs_file/798576/HTML/index.html), у которых внутренние упругие кардановые подвесы могут быть выполнены с одним или двумя кольцами, через которые с помощью торсионом вал приводного двигателя соединяется с ротором гироскопа. При этом по измерительным осям, которые ориентированы по корпусу, установлены датчики углов и датчики моментов. В книге приведена установка для исследования динамически настраиваемого гироскопа в режиме измерения угловой скорости. Для этого датчики углов, расположенные на взаимно перпендикулярных осях, через усилители подключаются к соответствующим датчикам моментов, расположенных на осях, перпендикулярных, осям размещения датчиков углов. Значения угловых скоростей снимается по току датчиков моментов с масштабных резисторов, включенных в цепи датчиков моментов.
Недостатком данного аналога является заниженная функциональность, которая позволяет демонстрировать и анализировать только режим измерения угловых скоростей.
Известен двухосный индикаторный гироскопический стабилизатор на динамически настраиваемом гироскопе (М.И. Дегтярев. К анализу устойчивости двухосного индикаторного гиростабилизатора на ДНГ. // Известия ТулГУ. Технические науки. Выпуск 2. – 2012, с. 403-408 . – URL: https://cyberleninka.ru/article/n/k-analizu-ustoychivosti-dvuhosnogo-indikatornogo-girostabilizatora-na-dinamicheski-nastraivaemom-giroskope/viewer), который принят за прототип. Двухосный индикаторный гироскопический стабилизатор (ДИГС) на динамически настраиваемом гироскопе (ДНГ) содержит наружное кольцо (раму), кинематически с помощью опор подвеса установленную в корпусе. В раму кинематически с помощью опор подвеса установлена платформа, на которой крепится ДНГ, который состоит из ротора, в котором установлен внутренний, упругий кардановый подвес, приводимого во вращение двигателем, закрепленным на корпусе ДНГ (на платформе). Упругий подвес с одной стороны вмонтирован в ротор, а с другой стороны с помощью вала соединен с валом двигателя. Упругий подвес состоит из кольца, которое с помощью одной пары торсионов соединяется с валом, а с помощью второй пары торсионов соединяется с ротором гироскопа. Измерение углов отклонения ротора гироскопа (вектора кинетического момента) относительно плоскости платформы осуществляется индуктивными датчиками углов торцевого, которые через усилители стабилизации соединены с соответствующими двигателями стабилизации, расположенными на осях подвеса рамы и платформы. Для управления положением ротора гироскопа служат датчики моментов также торцевого типа, закрепленные на корпусе ДНГ, которые подключены к выходам соответствующих усилителей управления.
Недостатком прототипа является ограниченная функциональность, которая позволяет демонстрировать и анализировать только режимы индикаторной стабилизации и управления положением платформы.
Цель изобретения состоит в расширении функциональных возможностей путем введения дополнительных режимов.
Поставленная цель достигается тем, что в установке для изучения режимов работы динамически настраиваемого гироскопа, содержащей гироскоп, состоящий из приводного двигателя, который через вал кинематически соединен с двухосным упругим подвесом, вмонтированным в ротор гироскопа, при этом измерительные оси, на которых установлены первый, второй датчики углов и первый, второй датчики моментов, соединенные с выходами первого и второго усилителей, ориентированы по корпусу гироскопа, который закреплен на платформе, помещенную своими полуосями с помощью опор подвеса в наружную раму, полуоси которой с помощью опор подвеса установлены в корпусе установки, при этом с полуосями наружной рамы и платформы соответственно кинематически связаны третий, четвертый датчики углов и первый, второй двигатели стабилизации, входы которых подключены к выходам третьего и четвертого усилителей, новым является то, что установка дополнена аналоговым коммутатором, на первый – шестой управляющие входы которого подключены первый – шестой задатчики режимов, на первый – седьмой сигнальные входы соответственно подключены выходы первого – четвертого датчика углов и первого – третьего задатчика команд, а на первый – третий сигнальные выходы соответственно подключены входы первого – третьего усилителей, на четвертый и пятый сигнальные выходы соответственно подключены первый и второй входы четвертого усилителя.
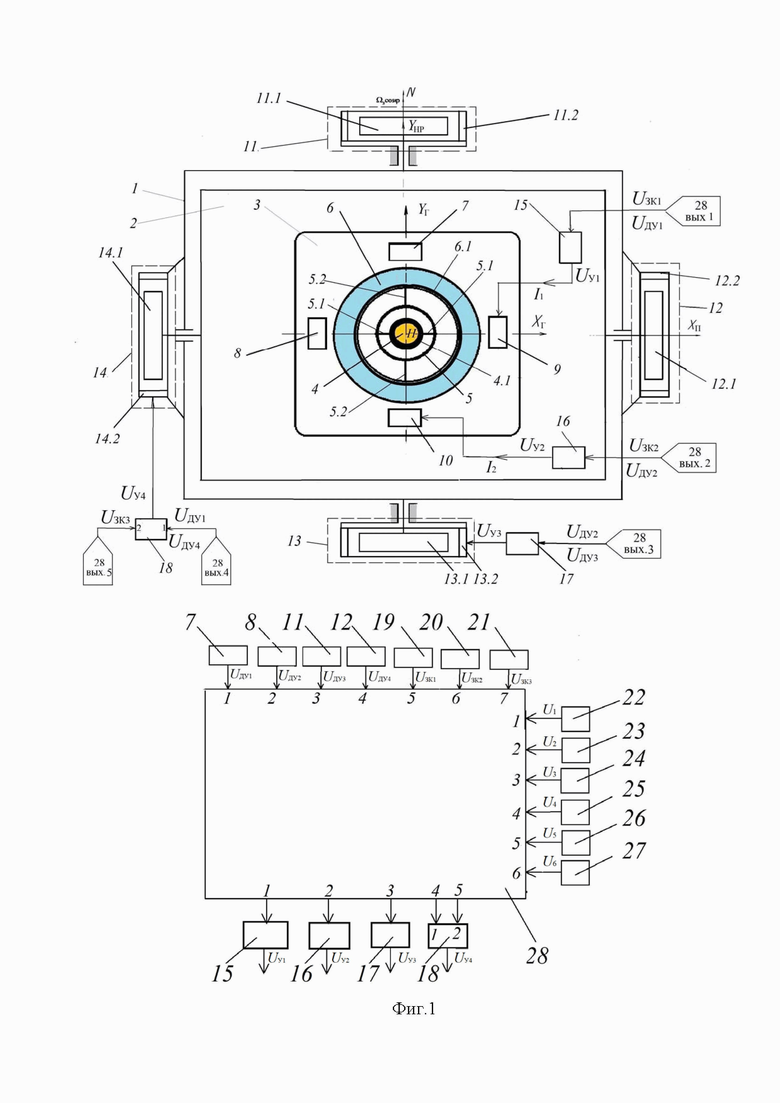
Работа установки поясняется структурно-кинематической схемой, представленной на фиг.1, где приняты следующие обозначения:
1. Наружная рама.
2. Платформа.
3. Динамически настраиваемый гироскоп.
4. Вал приводного двигателя (двигатель на фиг.1 не показан).
4.1. Первая втулка упругого подвеса.
5. Кольцо.
5.1. Первые торсионы упругого подвеса.
5.2. Вторые торсионы упругого подвеса.
6. Ротор гироскопа.
6.1. Вторая втулка упругого подвеса.
7. Первый датчик угла.
8. Второй датчик угла.
9. Первый датчик момента.
10. Второй датчик момента.
11. Третий датчик угла.
12. Четвертый датчик угла.
13. Первый двигатель стабилизации.
14. Второй двигатель стабилизации.
15. Первый усилитель.
16. Второй усилитель.
17. Третий усилитель.
18. Четвертый усилитель.
19. Первый задатчик команд.
20. Второй задатчик команд.
21. Третий задатчик команд.
22. Первый задатчик режимов.
23. Второй задатчик режимов.
24. Третий задатчик режимов.
25. Четвертый задатчик режимов.
26. Пятый задатчик режимов.
27. Шестой задатчик режимов.
28. Аналоговый коммутатор.
На фиг. 1 приняты следующие буквенные обозначения
 кинетический момент ротора гироскопа.
кинетический момент ротора гироскопа.
 ось подвеса платформы.
ось подвеса платформы.
 ось подвеса наружной рамы.
ось подвеса наружной рамы.
 измерительные оси, ориентированы по корпусу гироскопа.
измерительные оси, ориентированы по корпусу гироскопа.
 напряжения на выходе первого, второго, третьего и четвертого датчика углов соответственно.
напряжения на выходе первого, второго, третьего и четвертого датчика углов соответственно.
 напряжения на выходе первого, второго и третьего задатчика команд соответственно.
напряжения на выходе первого, второго и третьего задатчика команд соответственно.
 напряжения на выходе первого, второго, третьего и четвертого усилителей соответственно.
напряжения на выходе первого, второго, третьего и четвертого усилителей соответственно.
 напряжения на выходе первого, второго, третьего, четвертого, пятого и шестого задатчиков режимов соответственно.
напряжения на выходе первого, второго, третьего, четвертого, пятого и шестого задатчиков режимов соответственно.
 ток первого и второго датчика моментов.
ток первого и второго датчика моментов.
 угловая скорость вращения Земли.
угловая скорость вращения Земли.
 географическая широта.
географическая широта.
 направление на север.
направление на север.
 горизонтальная составляющая угловой скорости вращения Земли.
горизонтальная составляющая угловой скорости вращения Земли.
Состав установки.
Установка содержит ДНГ 3, установленный на платформу 2, помещенную в двухосный подвес. По оси подвеса наружной рамы 1 установлены роторы третьего датчика угла 11.1 и первого двигателя стабилизации 13.1, статоры которых 11.2 и 13.2 установлены на корпусе установки. По оси
подвеса наружной рамы 1 установлены роторы третьего датчика угла 11.1 и первого двигателя стабилизации 13.1, статоры которых 11.2 и 13.2 установлены на корпусе установки. По оси подвеса платформы 2 установлены роторы четвертого датчика угла 12.1 и второго двигателя стабилизации 114.1, статоры которых 12.2 и 14.2 установлены на наружной раме 1.
подвеса платформы 2 установлены роторы четвертого датчика угла 12.1 и второго двигателя стабилизации 114.1, статоры которых 12.2 и 14.2 установлены на наружной раме 1.
ДНГ 3 состоит из приводного двигателя, установленного на корпусе ДНГ и соответственно на платформе 2, и на фиг. 1 он представлен валом приводного двигателя 4, который кинематически с помощью двухосного упругого подвеса передает вращение ротору 6, создающего кинетический момент  Упругий подвес состоит первой втулки 4.1, которая с одной стороны жестко посажена на вал приводного двигателя 4, а с другой стороны с помощью первых торсионов 5.1 жестко соединена с кольцом 5, которое в свою очередь с помощью вторых торсионов 5.2, расположенных перпендикулярно первым торсионам, соединено со второй втулкой 6.1 упругого подвеса. Таким образом, двухосный упругий подвес конструктивно состоит из двух втулок 4.1 и 6.1, между которыми концентрично втулкам находится кольцо 5, соединенное с ними парами упругих торсионов 5.1 и 5.2, и изготавливается из одной заготовки. Для измерения углов отклонения ротора 6 (кинетического момента
Упругий подвес состоит первой втулки 4.1, которая с одной стороны жестко посажена на вал приводного двигателя 4, а с другой стороны с помощью первых торсионов 5.1 жестко соединена с кольцом 5, которое в свою очередь с помощью вторых торсионов 5.2, расположенных перпендикулярно первым торсионам, соединено со второй втулкой 6.1 упругого подвеса. Таким образом, двухосный упругий подвес конструктивно состоит из двух втулок 4.1 и 6.1, между которыми концентрично втулкам находится кольцо 5, соединенное с ними парами упругих торсионов 5.1 и 5.2, и изготавливается из одной заготовки. Для измерения углов отклонения ротора 6 (кинетического момента  ) в системе координат, связанной с корпусом ДНГ, используются торцевые датчики углов: первый датчик угла 7, измеряет поворот относительно оси
) в системе координат, связанной с корпусом ДНГ, используются торцевые датчики углов: первый датчик угла 7, измеряет поворот относительно оси  , второй датчик угла 8 измеряет угол поворота относительно оси
, второй датчик угла 8 измеряет угол поворота относительно оси  . Для управления отклонением ротора 6 (кинетического момента ) в системе координат, связанной с корпусом ДНГ, используются торцевые датчики моментов: первый датчик момента 9, который создает момент относительно оси, а прецессия от действия момента будет происходить относительно оси , второй датчик момента 10, который создает момент относительно оси , а прецессия от его действия будет происходить относительно оси
. Для управления отклонением ротора 6 (кинетического момента ) в системе координат, связанной с корпусом ДНГ, используются торцевые датчики моментов: первый датчик момента 9, который создает момент относительно оси, а прецессия от действия момента будет происходить относительно оси , второй датчик момента 10, который создает момент относительно оси , а прецессия от его действия будет происходить относительно оси  . Следует отметить, что, как это принято в литературе, торцевые датчики углов и моментов указаны условно. Следовательно, для управления ориентацией кинетического момента используются первый 9 и второй 10 датчики моментов, а для разворота платформы 2 используются первый 13 и второй 14 двигатели стабилизации. При этом на входы первого 9 и второго 10 датчиков момента подключены выходы первого 15 и второго 16 усилителей, а на входы первого 13 и второго 14 двигателей стабилизации – выходы третьего 17 и четвертого 18 усилителей. Сигналы, которые поступают на входы усилителей, будут определяться режимами функционирования установки, которые формируются первым 22 – шестым 27 задатчика режимов, первым 19 – третьим 21 задатчиком команд и логикой работы аналогового коммутатора 28. Задача аналогового коммутатора 28 состоит в формировании цепей между первым – седьмым сигнальными входами и первым – пятым сигнальными выходами в зависимости от сигналов, поступающих на первый – шестой управляющие входы, на которые подключены первый 22 – шестой 27 задатчики режимов. Если задатчик режимов включен, то на его выходе формируется высокий уровень напряжения, соответствующий логической единице «1», а если задатчик режимов выключен, то на его выходе формируется низкий уровень напряжения, соответствующий логическому нулю «0».
. Следует отметить, что, как это принято в литературе, торцевые датчики углов и моментов указаны условно. Следовательно, для управления ориентацией кинетического момента используются первый 9 и второй 10 датчики моментов, а для разворота платформы 2 используются первый 13 и второй 14 двигатели стабилизации. При этом на входы первого 9 и второго 10 датчиков момента подключены выходы первого 15 и второго 16 усилителей, а на входы первого 13 и второго 14 двигателей стабилизации – выходы третьего 17 и четвертого 18 усилителей. Сигналы, которые поступают на входы усилителей, будут определяться режимами функционирования установки, которые формируются первым 22 – шестым 27 задатчика режимов, первым 19 – третьим 21 задатчиком команд и логикой работы аналогового коммутатора 28. Задача аналогового коммутатора 28 состоит в формировании цепей между первым – седьмым сигнальными входами и первым – пятым сигнальными выходами в зависимости от сигналов, поступающих на первый – шестой управляющие входы, на которые подключены первый 22 – шестой 27 задатчики режимов. Если задатчик режимов включен, то на его выходе формируется высокий уровень напряжения, соответствующий логической единице «1», а если задатчик режимов выключен, то на его выходе формируется низкий уровень напряжения, соответствующий логическому нулю «0».
Режимы работы установки.
Режимы могут рассматриваться последовательно, как это приведено в описании, так и автономно в любой последовательности.
Предварительно корпус установки выставляют в горизонт, например, по жидкостному уровню и ориентируют осью  наружной рамы на географический север N.
наружной рамы на географический север N.
Режим 1. Электрическое арретирование платформы по корпусу.
Переключатель режимов 22 устанавливают в положение «Вкл», что соответствует подаче на первый управляемый вход коммутатора 28 напряжения  (соответствует логической единице). Переключатели 23-27 находятся в состоянии «Выкл», что соответствует подаче на второй-шестой управляемые входы коммутатора 28 напряжений
(соответствует логической единице). Переключатели 23-27 находятся в состоянии «Выкл», что соответствует подаче на второй-шестой управляемые входы коммутатора 28 напряжений  (соответствует логическим нулям). При этом коммутатор 28 соединяет третий 11 и четвертый 12 датчики углов с усилителями 17 и 18 соответственно (третий и четвертый сигнальные входы с третьим и четвертым сигнальными выходами). В результате данных соединений формируются следящие системы: третий датчик угла 11, третий усилитель 17 и первый двигатель стабилизации 13; четвертый датчик угла 12, четвертый усилитель 18 и второй двигатель стабилизации 14, которые разворачивают платформу 2 относительно осей и
(соответствует логическим нулям). При этом коммутатор 28 соединяет третий 11 и четвертый 12 датчики углов с усилителями 17 и 18 соответственно (третий и четвертый сигнальные входы с третьим и четвертым сигнальными выходами). В результате данных соединений формируются следящие системы: третий датчик угла 11, третий усилитель 17 и первый двигатель стабилизации 13; четвертый датчик угла 12, четвертый усилитель 18 и второй двигатель стабилизации 14, которые разворачивают платформу 2 относительно осей и  в положение нулевых напряжений датчика угла 11 и датчика угла 12. Платформа арретируется по корпусу установки.
в положение нулевых напряжений датчика угла 11 и датчика угла 12. Платформа арретируется по корпусу установки.
Режим 2. Электрическое арретирование ротора гироскопа относительно его корпуса (платформы).
Подают питание на гироскоп, ротор гироскопа разгоняется до номинальных оборотов, и кинетический момент ротора приобретает номинальное значение Н.
Переключатели режимов 22 и 23 устанавливают в положение «Вкл», что соответствует подаче на первый и второй управляющие входы коммутатора 28 напряжений и  (соответствует логической единице). Переключатели 24-27 находятся в состоянии «Выкл», что соответствует подаче на третий-шестой управляющие входы коммутатора 28 напряжений
(соответствует логической единице). Переключатели 24-27 находятся в состоянии «Выкл», что соответствует подаче на третий-шестой управляющие входы коммутатора 28 напряжений  (соответствует логическим нулям).
(соответствует логическим нулям).
При этом коммутатор 28 соединяет первый 7 и второй 8 датчики углов с усилителями 15 и 16 соответственно (первый и второй сигнальные входы с первым и вторым сигнальными выходами).
В результате данных соединений формируются гироскопические следящие системы. При отклонении кинетического момента Н относительно корпуса гироскопа по оси  угол поворота будет измеряться первым датчиком угла 7, который через первый сигнальный вход – первый сигнальный выход коммутатора 28 подключается на вход усилителя 15, выход которого соединен с первым датчиком моментов 9, который в силу того, что он торцевого типа, создаст момент относительно оси
угол поворота будет измеряться первым датчиком угла 7, который через первый сигнальный вход – первый сигнальный выход коммутатора 28 подключается на вход усилителя 15, выход которого соединен с первым датчиком моментов 9, который в силу того, что он торцевого типа, создаст момент относительно оси  такого направления, чтобы ось ротора 6 и соответственно кинетический момент Н на основании правила прецессии вращались (прецессировали) в направлении уменьшения напряжения
такого направления, чтобы ось ротора 6 и соответственно кинетический момент Н на основании правила прецессии вращались (прецессировали) в направлении уменьшения напряжения  вокруг оси .
вокруг оси .
Аналогично будет работать контур электрического арретирования при отклонении кинетического момента Н относительно корпуса гироскопа по оси  . Угол поворота будет измеряться вторым датчиком угла 8, который через второй усилитель 16 подключается ко второму датчику моментов 10, который в силу того, что он торцевого типа, создаст момент относительно оси
. Угол поворота будет измеряться вторым датчиком угла 8, который через второй усилитель 16 подключается ко второму датчику моментов 10, который в силу того, что он торцевого типа, создаст момент относительно оси  такого направления, чтобы ось ротора 6 и соответственно кинетический момент Н на основании правила прецессии вращались вокруг оси сторону уменьшения напряжения
такого направления, чтобы ось ротора 6 и соответственно кинетический момент Н на основании правила прецессии вращались вокруг оси сторону уменьшения напряжения  .
.
После арретирования в силу того, что корпус установки выставлен в плоскость местного горизонта, а платформа 2 арретирована по корпусу, кинетический момент будет направлен по местной вертикали.
Режим 3. Подготовка установки для изучения работы динамически настраиваемого гироскопа, как свободного гироскопа.
В этом режиме необходимо исключить влияние угловой скорости вращения Земли  . Для этого следует совместить кинетический момент Н с направлением и отключить электрическое арретирование гироскопа.
. Для этого следует совместить кинетический момент Н с направлением и отключить электрическое арретирование гироскопа.
Переключатели режимов 22 и 23 остаются в положении «Вкл», переключатель режимов 24 переводят в положение «Вкл», что соответствует подаче на первый, второй и третий управляющие входы коммутатора 28 напряжений , и (соответствует логической единице). Переключатели 25-27 находятся в состоянии «Выкл», что соответствует подаче на четвертый-шестой управляющие входы коммутатора 28 напряжений (соответствует логическим нулям). При этом дополнительно в коммутаторе 28 соединяется пятый сигнальный выход и седьмой сигнальный вход, на который с задатчика команд 21 подается напряжение
(соответствует логической единице). Переключатели 25-27 находятся в состоянии «Выкл», что соответствует подаче на четвертый-шестой управляющие входы коммутатора 28 напряжений (соответствует логическим нулям). При этом дополнительно в коммутаторе 28 соединяется пятый сигнальный выход и седьмой сигнальный вход, на который с задатчика команд 21 подается напряжение
 .
.
В результате подачи напряжения  на выходе усилителя 18 возникает рассогласование
на выходе усилителя 18 возникает рассогласование 
где  коэффициенты передачи четвертого усилителя 18 и четвертого датчика угла 12;
коэффициенты передачи четвертого усилителя 18 и четвертого датчика угла 12;  угол отклонения платформы 2.
угол отклонения платформы 2.
Под действием напряжения  второй двигатель стабилизации 14 разворачивает платформу 2 в новое заарретированное положение, характеризуемое равенством
второй двигатель стабилизации 14 разворачивает платформу 2 в новое заарретированное положение, характеризуемое равенством  при этом кинетический момент Н будет направлен по угловой скорости вращения Земли
при этом кинетический момент Н будет направлен по угловой скорости вращения Земли  .
.
Режим 4. Работы динамически настраиваемого гироскопа, как свободного гироскопа.
Для этого необходимо оставить платформу 2 в положении, соответствующему режиму 3, а сам гироскоп разарретировать.
При этом положение задатчиков режимов будет следующее: задатчики 22 и 24 будут включены, а задатчики 23 и 25 – 27 будут выключены. Гироскоп становится свободным, и по показаниям первого 7 и второго 8 датчиков углов можно наблюдать его дрейф во времени, который является одной из важных технических характеристик.
Режим 5. Режим измерения угловой скорости основания.
При этом в качестве угловой скорости можно использовать угловую скорость вращения Земли или угловую скорость специальной вращающееся платформы, например, МПУ-1.
Если в качестве входной угловой скорости использовать угловую скорость вращения Земли, то ДНГ должен иметь дрейф значительно меньше  При этом платформу с ДНГ можно развернуть таким образом, что будет измеряться либо вертикальная составляющая
При этом платформу с ДНГ можно развернуть таким образом, что будет измеряться либо вертикальная составляющая  либо горизонтальная составляющая
либо горизонтальная составляющая  либо
либо 
Рассмотрим в качестве примера измерение горизонтальной составляющей  В этом режиме задатчики 22 и 23 включены, задатчики 24-27 выключены, сигнал отключен и установка придет в положение, соответствующее режиму 2.
В этом режиме задатчики 22 и 23 включены, задатчики 24-27 выключены, сигнал отключен и установка придет в положение, соответствующее режиму 2.
За счет наличия угловой скорости  направленной по оси
направленной по оси  , возникнет сигнал на втором датчике угла 8, который поступит на второй сигнальный вход коммутатора 28 и далее на его второй сигнальный выход, с которого сигнал через усилитель 16 поступит на второй датчик моментов 10. Так как он торцевого типа, то момент будет направлен по оси
, возникнет сигнал на втором датчике угла 8, который поступит на второй сигнальный вход коммутатора 28 и далее на его второй сигнальный выход, с которого сигнал через усилитель 16 поступит на второй датчик моментов 10. Так как он торцевого типа, то момент будет направлен по оси  такого знака, чтобы в результате прецессии сигнал со второго датчика углов 8 уменьшался.
такого знака, чтобы в результате прецессии сигнал со второго датчика углов 8 уменьшался.
В установившемся режиме будет выполняться равенство
где  крутизна датчика моментов по току.
крутизна датчика моментов по току.
Из данного равенства следует, что ток второго датчика моментов 8 пропорционален угловой скорости
который измеряется по напряжению, снимаемому с масштабного резистора, включенного в цепь датчика моментов (стандартная схема измерения и резистор на рисунке не показан).
Так как по оси  входной угловой скорости нет, то второй канал продолжает работать в режиме электрического арретирования гироскопа.
входной угловой скорости нет, то второй канал продолжает работать в режиме электрического арретирования гироскопа.
Режим 6. Работа установки в режиме двухосного индикаторного гиростабилизатора.
В этом случае четвертый задатчик режимов 25 переведен в положение «Вкл», 22-24 и 26-27 отключены. Аналоговый коммутатор формирует следующие две цепи: первый сигнальный вход соединяется с четвертым сигнальным выходом и второй сигнальный вход соединяется с третьим сигнальным выходом. Остальные цепи внутри коммутатора разомкнуты.
Рассмотрим работу индикаторного гиростабилизатора, например, по оси подвеса наружной рамы.
При действии возмущающего момента по оси начнет поворачиваться наружная рама 1 вместе с платформой 2 и корпусом ДНГ 3. Кинетический момент  в силу основного свойства гироскопа сохранит неизменным прежнее направление и второй датчик угла 8 зарегистрирует это отклонение виде напряжения
в силу основного свойства гироскопа сохранит неизменным прежнее направление и второй датчик угла 8 зарегистрирует это отклонение виде напряжения  . По сформированной в аналоговом коммутаторе 28 цепи сигнал поступит на вход третьего усилителя 17. После усиления напряжение
. По сформированной в аналоговом коммутаторе 28 цепи сигнал поступит на вход третьего усилителя 17. После усиления напряжение  поступит на первый двигатель стабилизации 13, который своим моментом компенсирует внешнее воздействие. При этом можно измерять все указанные сигналы в данной цепи, которые характеризуют технические характеристики режима индикаторной стабилизации.
поступит на первый двигатель стабилизации 13, который своим моментом компенсирует внешнее воздействие. При этом можно измерять все указанные сигналы в данной цепи, которые характеризуют технические характеристики режима индикаторной стабилизации.
Режим 7. Работа установки в режиме разворота платформы.
Возможны следующие варианты управления:
7.1. Разворот относительно оси 
7.2. Разворот относительно оси 
7.3. Разворот относительно обеих осей 
 одновременно.
одновременно.
В качестве примера, рассмотрим вариант 7.1.
В этом случае задатчики режимов 25-26 переведены в положение «Вкл», 22-24 и 27 отключены. Аналоговый коммутатор формирует следующие цепи: первый сигнальный вход соединяется с четвертым сигнальным выходом, второй сигнальный вход соединяется с третьим сигнальным выходом и пятый сигнальный вход соединяется с первым сигнальным выходом. Остальные цепи внутри коммутатора разомкнуты.
Под действием напряжения  первый датчик момента 9 создаст момент относительно оси гироскопа
первый датчик момента 9 создаст момент относительно оси гироскопа  который в соответствии с правилом прецессии создаст угловую скорость гироскопа по оси
который в соответствии с правилом прецессии создаст угловую скорость гироскопа по оси 

Отклонение, вызванное этой угловой скоростью, зафиксирует первый датчик угла 7. Пройдя сформированную аналоговым коммутатором цепь (первый сигнальный вход – четвертый сигнальный выход) сигнал датчика угла 7 в виде напряжения  через четвертый усилитель 18 подается на второй двигатель стабилизации 14. Под действием напряжения
через четвертый усилитель 18 подается на второй двигатель стабилизации 14. Под действием напряжения  второй двигатель стабилизации 14 начинает вращать платформу 2 относительно оси
второй двигатель стабилизации 14 начинает вращать платформу 2 относительно оси  в сторону уменьшения напряжения
в сторону уменьшения напряжения  с угловой скоростью
с угловой скоростью 
В установившемся режиме вращение будет происходить со скоростью, которая задается напряжением задатчиком команд 19 и будет равна угловой скорости прецессии  В данном режиме можно измерять угол и угловую скорость поворота платформы, которая определяет важный параметр гироскопа.
В данном режиме можно измерять угол и угловую скорость поворота платформы, которая определяет важный параметр гироскопа.
Для реализации указанных режимов работы ДНГ в составе двухосного индикаторного гиростабилизатора аналоговый коммутатор можно реализовать на элементной базе коммутаторов 590КН1–590КН6 или ПЛИС – программируемые логические интегральные схемы. Возможно применение микроконтроллера.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2528105C2 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ, УСКОРЕННОГО ВОССТАНОВЛЕНИЯ И КОНТРОЛЯ СИЛОВОЙ ГИРОСКОПИЧЕСКОЙ ВЕРТИКАЛИ | 2000 |
|
RU2172934C1 |
| КУРСОВАЯ СИСТЕМА | 2008 |
|
RU2381452C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| КУРСОВАЯ СИСТЕМА | 2004 |
|
RU2279636C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| Устройство для измерения углов отклонения подвижного объекта | 1991 |
|
SU1810756A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
Изобретение относится к техническим средствам изучения и анализа режимов работы динамически настраиваемых гироскопов в составе двухосных индикаторных гироскопических стабилизаторов, а также для анализа технических характеристик гироскопа в лабораторных условиях. Установка для изучения режимов работы динамически настраиваемого гироскопа содержит платформу, помещенную своими полуосями с помощью опор подвеса в наружную раму, полуоси которой с помощью опор подвеса установлены в корпусе установки. Платформа выполнена с возможностью крепления гироскопа, включающего приводной двигатель, кинематически соединенный с двухосным упругим подвесом, который вмонтирован в ротор гироскопа. Оборудование установки содержит аналоговый коммутатор, два двигателя стабилизации, четыре датчика углов, два датчика моментов, четыре усилителя, шесть задатчиков режимов, соединенные определенным образом. Обеспечивается расширение функциональных возможностей установки. 1 ил.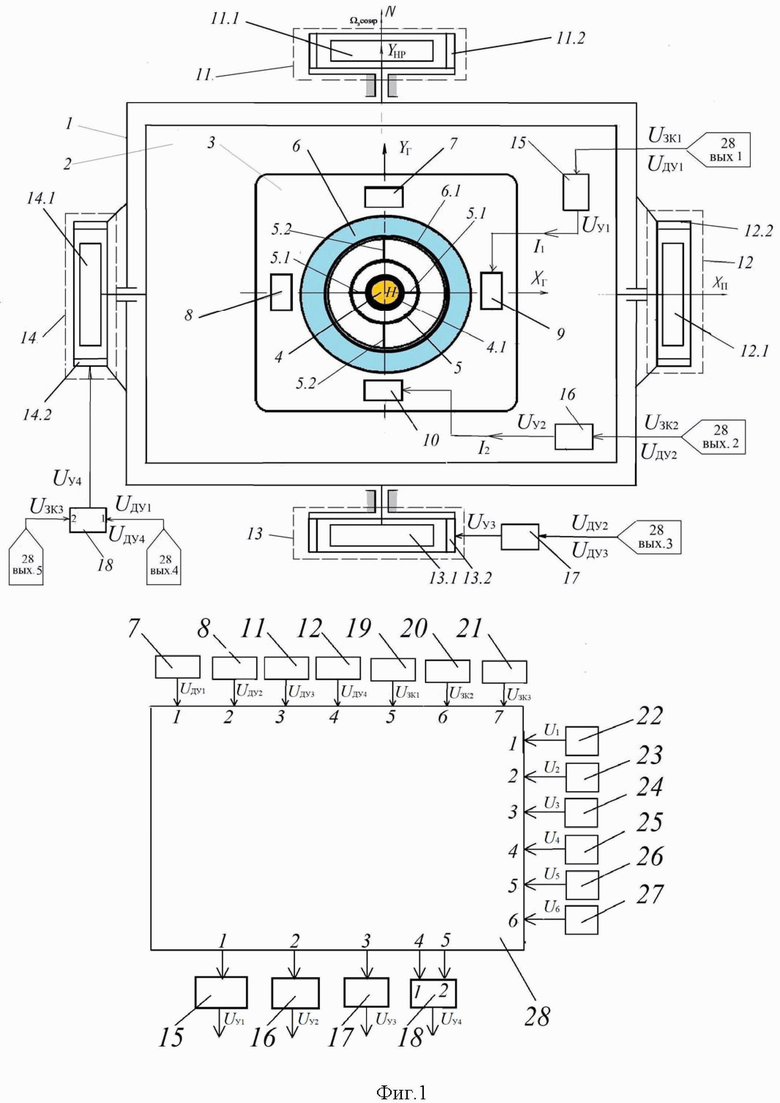
Установка для изучения режимов работы динамически настраиваемого гироскопа, содержащая гироскоп, состоящий из приводного двигателя, который через вал кинематически соединен с двухосным упругим подвесом, вмонтированным в ротор гироскопа, при этом измерительные оси, на которых установлены первый, второй датчики углов и первый, второй датчики моментов, соединенные с выходами первого и второго усилителей, ориентированы по корпусу гироскопа, который закреплен на платформе, помещенной своими полуосями с помощью опор подвеса в наружную раму, полуоси которой с помощью опор подвеса установлены в корпусе установки, при этом с полуосями наружной рамы и платформы соответственно кинематически связаны третий, четвертый датчики углов и первый, второй двигатели стабилизации, входы которых подключены к выходам третьего и четвертого усилителей, отличающаяся тем, что установка дополнена аналоговым коммутатором, на первый – шестой управляющие входы которого подключены первый – шестой задатчики режимов, на первый – седьмой сигнальные входы соответственно подключены выходы первого – четвертого датчика углов и первого – третьего задатчика команд, а на первый – третий сигнальные выходы соответственно подключены входы первого – третьего усилителей, на четвертый и пятый сигнальные выходы соответственно подключены первый и второй входы четвертого усилителя.
| СПОСОБ НЕПРЕРЫВНОЙ ДВКОБАЛЬТИЗАЦИИ КАТАЛИЗАТА | 0 |
|
SU175053A1 |
| УПРАВЛЯЕМЫЙ ВЫПРЯМИТЕЛЬ | 0 |
|
SU205130A1 |
| ДЕМОНСТРАЦИОННЫЙ ГИРОСТАБИЛИЗАТОР | 2009 |
|
RU2399960C1 |
| CN 206370184 U, 01.08.2017 | |||
| CN 206194222 U, 24.05.2017 | |||
| CN 209328355 U, 30.08.2019. | |||

