Изобретение относится к гироскопии и может быть использовано в гироскопах систем инерциального управления объектами.
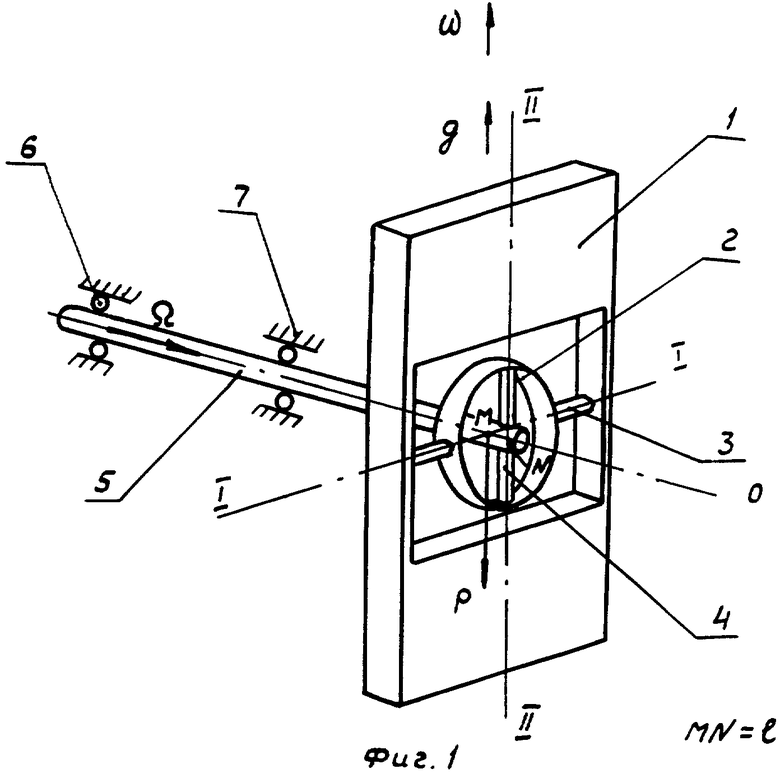
В настоящее время известен вибрационный гироскоп (см., например, Л.И.Брозгуль, Е.Л.Смирнов, Вибрационные гироскопы. Машиностроение, 1970, с.15, рис. 2.1.7), представленный на фиг.1.
Здесь чувствительный элемент (ЧЭ), состоящий из ротора 1, кольца 2 и двух пар взаимноортогональных наружных 3 и внутренних 4 растяжек, укреплен на валу 5, установленном на подшипниках 6 в основании 7.
Вал вместе с установленным на нем ЧЭ приведен во вращение с угловой скоростью Ω от двигателя, не показанного на фиг.1.
При вращении основания со скоростью ω в инерциальном пространстве вокруг оси, перпендикулярной оси вращения вала возникают колебания ротора вокруг осей симметрии растяжек I-I и II-II на частоте 2 Ω относительно основания. По амплитуде этих колебаний и судят о величине входной угловой скорости ω.
Существенным недостатком рассмотренного вибрационного гироскопа (ВГ) является непересечение осей симметрии растяжек "l" (фиг.1). Вследствие этого недостатка при движении основания ВГ с ускорением в выходном канале гироскопа (колебания ротора) появляется помеха, синхронная с полезным сигналом. В самом деле, как непосредственно следует из рассмотрения фиг.1, при движении основания с ускорением  на ротор, центр масс М которого расположен, например на оси наружных растяжек, воздействует инерционная сила Р=mg, где m - масса ротора. Вследствие этого возникают колебания ротора вокруг оси внутренних растяжек на частоте 2 Ω относительно основания.
на ротор, центр масс М которого расположен, например на оси наружных растяжек, воздействует инерционная сила Р=mg, где m - масса ротора. Вследствие этого возникают колебания ротора вокруг оси внутренних растяжек на частоте 2 Ω относительно основания.
Эта помеха существенно снижает точность ВГ и в настоящее время не позволяет его использовать на объектах, двигающихся с ускорениями.
Другим недостатком рассмотренного ВГ является сложность изготовления ЧЭ, поскольку необходимо обработать 8 раздельных боковых и 4 торцевых поверхности растяжек с применением доводочных операций, что повышает стоимость изготовления ЧЭ.
Целью настоящего изобретения является устранение указанных недостатков и, тем самым, удешевление изготовления ЧЭ и повышение точности ВГ.
Эта цель достигается таким конструктивным исполнением ЧЭ, которое позволяет совместно и одновременно обрабатывать поверхности нескольких растяжек минимальным числом операций.
Изложенная сущность изобретения поясняется чертежами, где изображены:
на фиг.1 - известный ВГ;
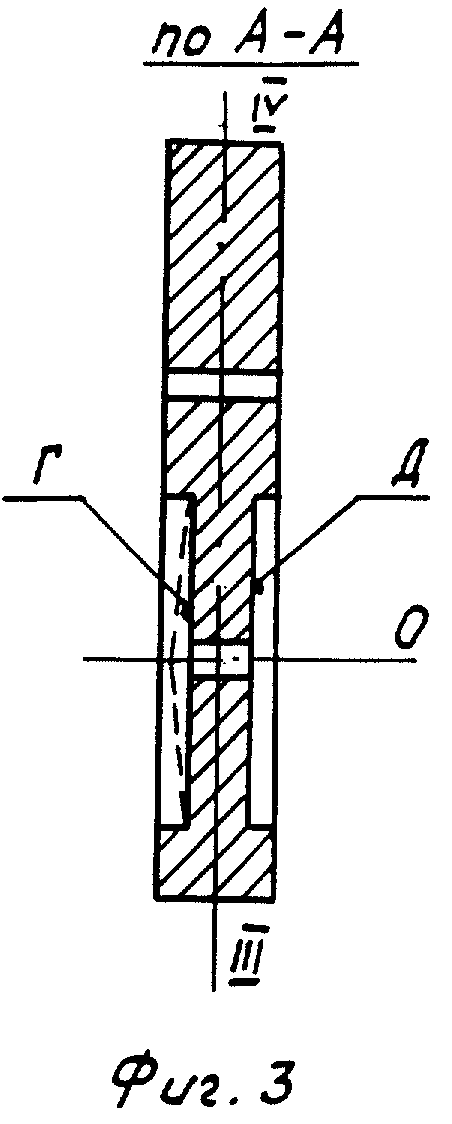
на фиг.2 - предлагаемый ЧЭ;
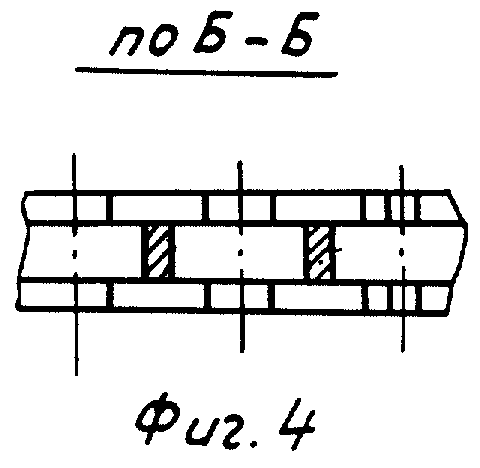
на фиг.3 - разрез ЧЭ по А-А на фиг.2;
на фиг.4 - разрез ЧЭ по Б-Б на фиг.2.
Ротор 1 (фиг.2) укреплен с помощью двух пар взаимноортогональных растяжек 9 и 10 и кольца 11 на валу 5 (на фиг.2 вал полностью не показан). Боковые поверхности В всех растяжек и прилегающие поверхности ротора и кольца образованы четырьмя поверхностями вращения, например цилиндрическими, как показано на фиг.2 и 4. Оси поверхностей вращения параллельны продольной оси ротора 0 и равноудалены от нее. Расстояния между каждыми двумя осями соседних поверхностей вращения одинаковы, поэтому наименьшие сечения растяжек 9 и 10, определяющие расположение осей симметрии растяжек, равноудалены от продольной оси ротора. Торцевые поверхности Г и Д (фиг.3) всех растяжек и кольца образованы двумя плоскостями.
Измерение угловой скорости ω предлагаемым ЧЭ ВГ осуществляется также, как и его прототипом: при вращении вала вокруг продольной оси ротора со скоростью Ω и повороте основания в инерциальном пространстве с угловой скоростью ω возникают колебания ротора вокруг осей симметрии растяжек III-III и IV-IV (фиг.2) на частоте 2 Ω относительно основания, амплитуда которых и содержит информацию о величине ω.
Как непосредственно следует из рассмотрения фиг.2, 3, 4, торцевые и боковые поверхности всех растяжек образованы поверхностями вращения, поэтому все они, в отличие от прототипа ЧЭ, могут быть изготовлены вращением заготовки предлагаемого ЧЭ вокруг соответствующей оси. При этом несовершенство изготовления поверхностей вращения (например, нецилиндричность) не приводит к появлению непересечения осей симметрии растяжек III-III и IV-IV, так как это несовершенство в одинаковой степени смещает обе оси симметрии.
В самом деле, при параллельных плоскостях Г и Д (фиг.3) непересечение осей III-III и IV-IV отсутствует. Если одна из поверхностей, например Г, выполнена конусной (как показано пунктиром на фиг.3), то это несовершенство приводит к одновременному смещению центров минимальных сечений всех растяжек на одну и ту же величину (вследствие равноудаленности этих сечений от продольной оси ротора) и поэтому не может вызвать появления непересечения осей III-III и IV-IV. Нетрудно видеть, что непараллельность плоскостей Г и Д также не приводит к появлению непересечения осей растяжек. Несовершенство (например, конусность) поверхности вращения, формирующей боковую поверхность двух соседних растяжек, приводит к смещению двух центров минимальных сечений соседних растяжек на одну и ту величину и поэтому также не может вызвать появления непересечения осей растяжек.
Таким образом, в предлагаемом ЧЭ не может возникнуть непересечение осей симметрии растяжек даже при наличии несовершенства изготовления растяжек. Все изготовление растяжек состоит из вдвое меньшего (по сравнению с прототипом) числа операций (растачивание 4 отверстий и 2 торцев) при облегченных требованиях к их точности, что упрощает и удешевляет изготовление ЧЭ.
Теоретический расчет предлагаемого устройства, произведенный автором изобретения, показывает, что вследствие снижения непересечения осей симметрии растяжек точность ВГ с применением предлагаемого ЧЭ повышается не менее, чем на порядок, что дает значительный технический эффект.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1980 |
|
RU2101678C1 |
| ДВУХКООРДИНАТНЫЙ ДАТЧИК УГЛА | 1998 |
|
RU2154257C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ В СОСТАВЕ ГИРОСТАБИЛИЗАТОРА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1989 |
|
RU2065574C1 |
| СПОСОБ ИНДИКАЦИИ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 1983 |
|
RU2075730C1 |
| Инерциальный измерительный модуль | 2021 |
|
RU2761592C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2003 |
|
RU2243569C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| СПОСОБ ИНДИКАЦИИ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ ОСНОВАНИЯ | 1975 |
|
RU2056623C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
Изобретение относится к гироскопии и может быть использовано в гироскопах систем инерциального управления объектами. Сущность: устройство содержит ротор, кольцо и две пары взаимоортогональных растяжек. При этом боковые поверхности растяжек образованы четырьмя цилиндрическими поверхностями, оси которых параллельны оси вращения ротора и равноудалены от нее. Причем расстояние между каждыми двумя осями соседних поверхностей одинаковы. Технический результат: упрощение чувствительного элемента и обеспечение пересечения продольных осей симметрии растяжек. 4 ил.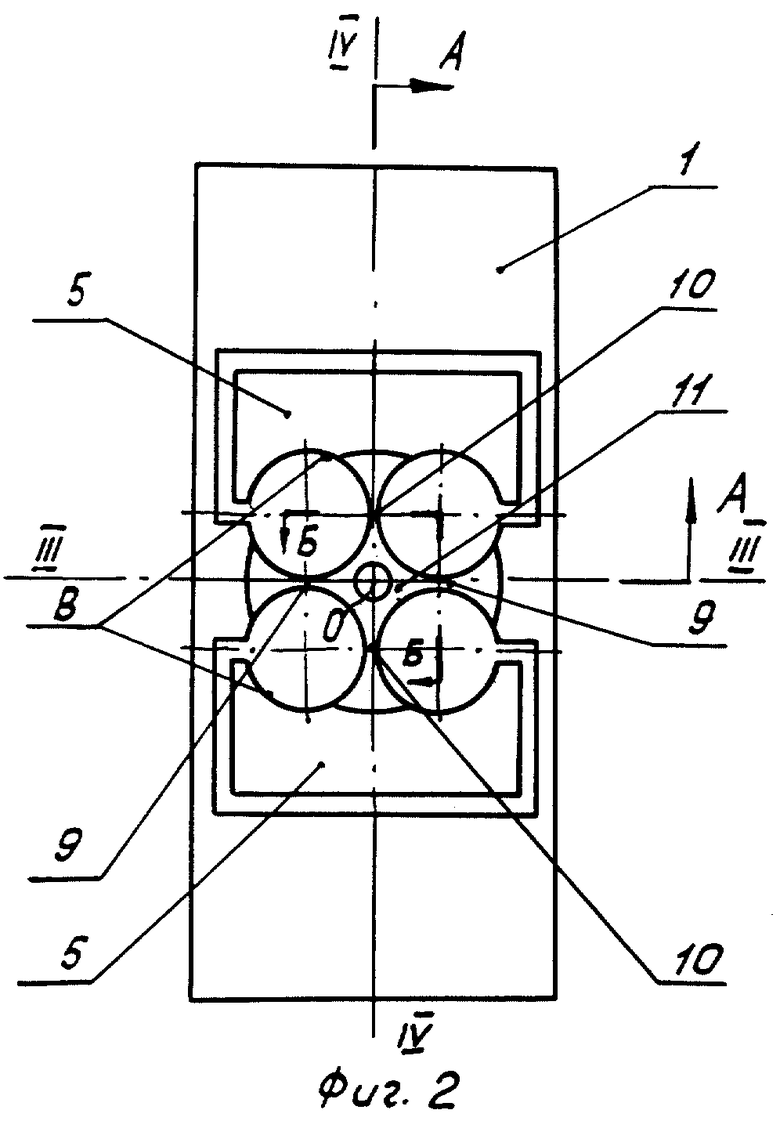
Чувствительный элемент роторного вибрационного гироскопа, содержащий ротор, кольцо и две пары взаимоортогональных растяжек, отличающийся тем, что, с целью упрощения чувствительного элемента и обеспечения пересечения продольных осей симметрии растяжек, боковые поверхности растяжек образованы четырьмя цилиндрическими поверхностями, оси которых параллельны оси вращения ротора и равноудалены от нее, а расстояние между каждыми двумя осями соседних поверхностей одинаковы.

