Изобретение относится к области преобразователей механических величин в электрические и может быть применено в тех областях, где необходимо осуществлять измерения углов поворота ротора в двух ортогональных плоскостях в пределах ±180o и более, например, в гироскопии, в системах управления, в робототехнических устройствах и т.п.
Известны различные датчики угла поворота, сферического ротора, осуществляющие измерения по двум ортогональным координатам (см. например, А.А.Одинцов. Проектирование элементов гироскопических устройств. М.: Высшая школа, 1962, стр.72-73. П.И.Малеев. Новые типы гироскопов. Л.: Судостроение. 1971. стp.22-24. Г.Е.Шульман. Шаровые гироскопы. Л.: Судостроение. 1970. стр.39.)
Основным недостатком известных датчиков является ограниченный угол поворота ротора, в котором осуществляется измерение, а также сложный характер зависимости выходного напряжения от угла поворота.
Расширение диапазона углов измерения осуществляется у таких датчиков точным разворотом корпуса (статора) под нулевое значение выходного напряжения. Для обеспечения измерения положения ротора в инерциальном пространстве, т.е. в пределах изменения углов ±180o, применяется механическая развязка в виде кардановых колец со следящими системами, что существенно усложняет конструкцию. Совершенно неприемлемыми такие датчики становятся в бескарданных гироскопических устройствах и системах управления.
Наиболее близкими аналогами предлагаемого датчика угла являются датчики, содержащие обмотку возбуждения и две списывающие обмотки, амплитуда выходного напряжения каждой из которых зависит от угла рассогласования между осями статора и ротора в ортогональных плоскостях (см. указанные выше книги А.А. Одинцова и Г.Е.Шульмана).
В качестве прототипа, выбираем датчик угла, по патенту США класс 74-5.6. N 3.226.983 под названием "Induction Pickoff Device", описанный в книге Г.Е. Шульмана "Шаровые гироскопы", стр.39-40.
Датчик содержит статор с обмоткой возбуждения, охватывающей магнитопровод с четырьмя катушками двух выходных обмоток, расположенных ортогонально. Сплошной сферический ротор датчика находится в газовом подвесе и приводится во вращение статором, охватывающим экватор. Датчик угла со всеми обмотками охватывает лишь часть сферы ротора вблизи подвеса.
Недостатком прототипа является то, что датчик не позволяет измерять углы поворота оси вращения ротора в пределах ±180o. Кроме того, датчик-прототип не способен измерять углы поворота невращающегося ротора.
Целью изобретения является создание датчика угла поворота, свободного от указанных недостатков.
Поставленная цель в предлагаемом датчике достигнута в результате того, что обмотка возбуждения и две сигнальные обмотки расположены на статоре так, что их центральные оси - взаимноортогональны. ротор выполнен электропроводящим, имеющим единственную ось симметрии, которая пересекается с центральными осями всех обмоток статора в центре подвеса ротора.
Сущность изобретения поясняется чертежами. На фиг.1 изображено расположение обмоток датчика угла вокруг ротора; на фиг.2 изображены варианты исполнения ротора: а) тонкостеннная сфера с переменным сечением; б) пустотелый цилиндр; в) диск; д) два диска, разнесенные по главной оси. На фиг. 3 дана электрическая схема датчика угла. На фиг.4 - векторная диаграмма потоков по осям.
На фиг.1-4 приняты следующие обозначения:
X, Y, Z - пространственные оси, а также центральные оси обмоток Wx, Wy, Wz; P - ротор;
W'x, W''x, W'y, W''y, W'z W''z - катушки соответствующих обмоток;
Uв - напряжение возбуждения;
Ux, Uy - выходные напряжения по осям X и Y.
Как показано на фиг.1, центральные оси X, Y, Z обмоток Wx, Wy, Wz предлагаемого датчика угла расположены взаимноортогонально. Количество катушек в одной обмотке и распределение катушек по поверхности статора может быть различным, однако непременным должно быть выполнение предложенного нами признака: центральные оси обмоток должны быть взаимноортогональны и пересекаться в центре подвеса ротора. На фиг.1 в качестве примера показано, что каждая обмотка состоит из двух катушек, расположенных на одной оси. В зависимости от уровня выходного напряжения источника возбуждения или от требуемой крутизны датчика катушки могут соединяться последовательно или параллельно. Возможно выполнение обмотки в виде одной катушки, расположенной на одной оси и лежащей в диаметральной плоскости ротора. Однако это не всегда удобно по конструктивным соображениям.
На фиг. 2 показаны варианты выполнения ротора. В роторе на фиг.2а, выполненном из электропроводящего материала, толщина стенок в сечении) проходящем через ось симметрии сделана различной. В результате ротор имеет единственную ось электрической и механической симметрии, проходящую через его центр и центр подвеса. В этом центре пересекаются также центральные оси всех обмоток статора датчика угла.
Возможны другие конструктивные варианты выполнения ротора: он может быть выполнен в виде оплошного или пустотелого цилиндра (фиг. 26); в виде кольца или диска (фиг. 2в), расположенного в плоскости, проходящей через центр подвеса, в виде нескольких колец или дисков, разнесенных симметрично от центра вдоль оси симметрии, и т.п. Непременным остается только заявленный нами признак: ротор датчика угла имеет единственную ось симметрии, проходящую через центр подвеса и пересекающуюся с осями трех обмоток датчика в этом центре.
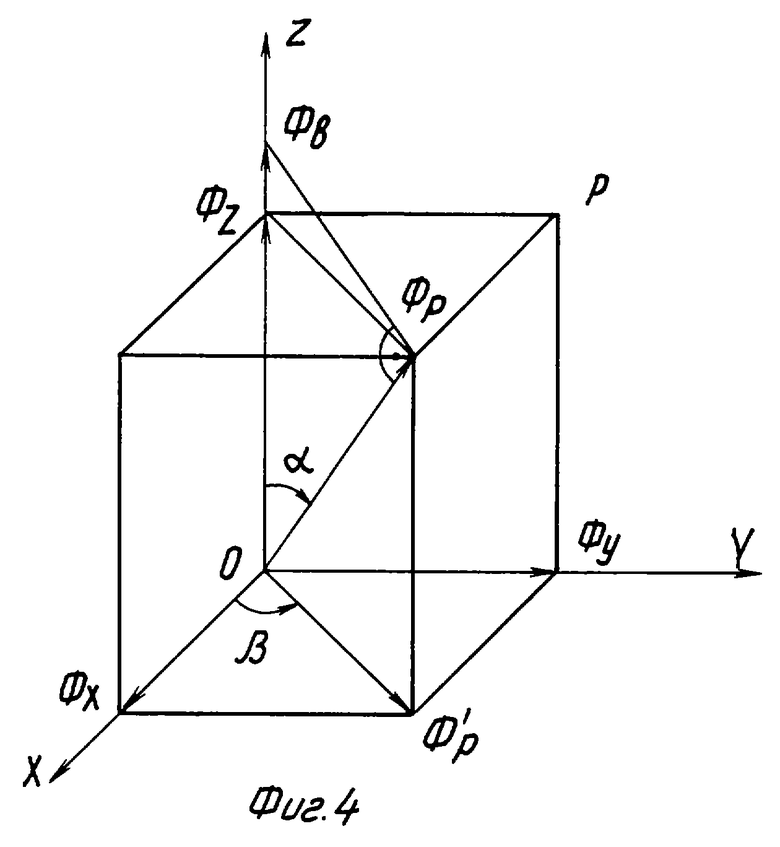
Работа предлагаемого датчика угла основана на том, что при подаче напряжения UB= Um• sin ω c, например, в обмотку Wz (фиг. 3), в датчике создается переменный магнитный поток возбуждения  (фиг.4), направленный по оси Z. (Здесь Um- амплитуда ω = 2πfн, fн- несущая частота).
(фиг.4), направленный по оси Z. (Здесь Um- амплитуда ω = 2πfн, fн- несущая частота).
Если ось симметрии ротора OP отклонена от оси Z на угол α, а ее проекция на плоскость XOZ отклонена от оси X на угол β (от оси Y - на угол 90o - β ), то поток  создает в роторе с сопротивлением Rp ЭДС
создает в роторе с сопротивлением Rp ЭДС  ток
ток  и магнитный поток
и магнитный поток  направленный по оси симметрии ротора OP, равные
направленный по оси симметрии ротора OP, равные
Здесь k1, k2, k3 - коэффициенты, определяемые параметрами ротора и статора датчика; wр = 1 число витков ротора; Rм магнитное сопротивление среды.
Магнитный поток  ротора, направленный по оси OP, создает в плоскости XOY магнитный поток
ротора, направленный по оси OP, создает в плоскости XOY магнитный поток  равный
равный
Магнитный поток Φp′ имеет составляющие по осям X и Y равные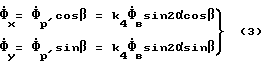
Эти потоки создают в сигнальных обмотках Wx и Wy ЭДС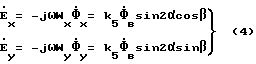
По этим зависимостям легко определить положение оси симметрии ротора в пространстве. В частности, если ось ротора перемещается в плоскости ZOX, т. е. угол β = 0, то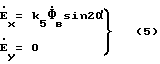
Соответственно, если ось симметрии находится в плоскости ZOY, т.е. угол β = 90o, то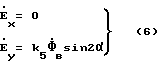
Из формул (1)-(6) следует, что предлагаемый датчик обеспечивает решение поставленной задачи: измерение углов рассогласования в двух ортогональных плоскостях в диапазоне ±180o.
Пропорциональность выходных напряжении синусу двойного угла не ограничивает возможности датчика в диапазоне ±180o. При необходимости измерений в диапазоне 0-360o всегда можно обеспечить однозначность измерений внешними традиционными средствами.
С привлечением дополнительных средств обработки информации можно осуществлять измерение углов поворота ротора в трех взаимно ортогональных плоскостях.
Важным достоинством предлагаемого датчика является то, что в нем при неизменном положении статора (корпуса) можно осуществить поворот системы координат на угол 90o в любом направлении переключением обмотки возбуждения и списывающих обмоток.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2167396C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| Способ измерения параметров угловой скорости и ускорения микромеханическими гироскопами и акселерометрами | 2021 |
|
RU2766833C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056642C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 2001 |
|
RU2205367C1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ НОСИТЕЛЕЙ | 1993 |
|
RU2056643C1 |
| ГРАВИТАЦИОННЫЙ ВАРИОМЕТР | 2000 |
|
RU2172967C1 |
| Индукционный датчик | 1989 |
|
SU1705974A1 |
| ГРАВИМЕТР ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ С ДВИЖУЩИХСЯ СУХОПУТНЫХ НОСИТЕЛЕЙ В РЕЖИМЕ КРАТКОВРЕМЕННЫХ ОСТАНОВОК | 1993 |
|
RU2056641C1 |


Датчик предназначен для преобразования механических величин в электрические, например, в гироскопии, где необходимо обеспечить измерение углов поворота ротора в двух взаимно ортогональных плоскостях. Датчик содержит статор с обмоткой возбуждения и двумя сигнальными обмотками, расположенными взаимно ортогонально, и электропроводящий ротор. Ротор имеет единственную ось симметри. Ось симметрии ротора пересекается с центральными осями всех обмоток статора в центре подвеса ротора. Обеспечивается возможность измерения углов поворота ротора в двух ортогональных плоскостях в пределах ±180°. 4 ил.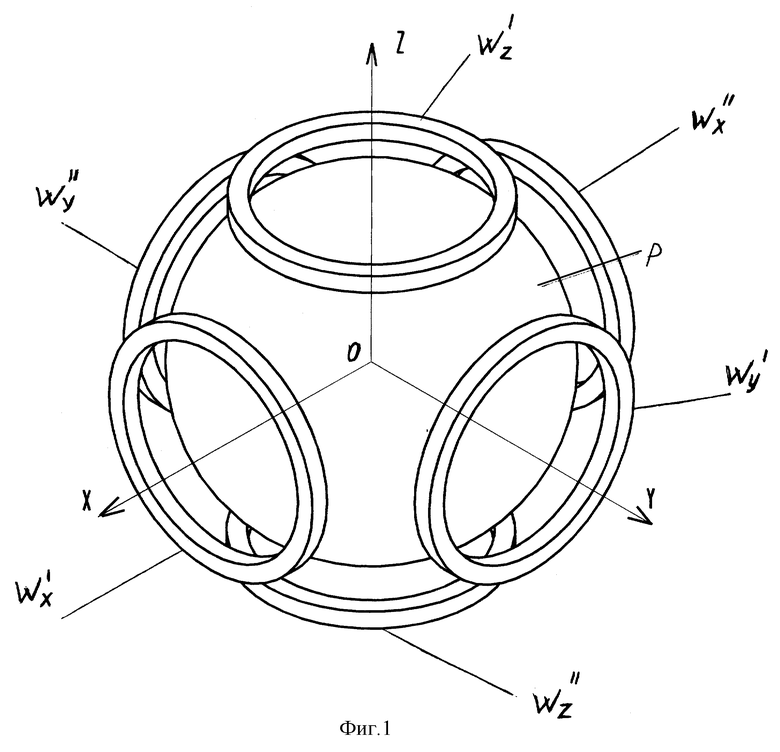
Двухкоординатный датчик угла, например, гироскопа, содержащий ротор в подвесе и статор с обмоткой возбуждения и двумя сигнальными обмотками, отличающийся тем, что в нем обмотки статора расположены так, что их центральные оси взаимно ортогональны, ротор выполнен электропроводящим, имеющим единственную ось симметрии, которая пересекается с центральными осями всех обмоток статора в центре подвеса ротора.
| Шульман Г.Е | |||
| Шаровые гироскопы | |||
| - Л.: Судостроение, 1970, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Цифровой фазометр | 1981 |
|
SU1273832A1 |
| US 4074580, 21.02.1978 | |||
| Двухкоординатный датчик углов наклона | 1990 |
|
SU1783291A1 |

