Изобретение относится к области радиолокации и может быть использовано во всех радиолокационных станциях (РЛС) для распознавания объектов с колеблющимися оболочками.
К объектам с колеблющимися оболочками могут быть отнесены наземные и аэродинамические объекты, поверхность которых колеблется в результате движения и других причин, вызывая модуляцию отраженных сигналов.
Известно устройство для распознавания объекта (патент США №3772689, МКП G01S 9/02, 1973 г.), использующее в качестве признаков набор отношений максимальной амплитуды отраженного сигнала к минимальной.
Однако указанные признаки не обладают достаточной устойчивостью при изменении параметров движения распознаваемых объектов.
Наиболее близким техническим решением (патент Франции №2193983, МКП G01S 9/00, 1974 г.) является устройство, использующее блоки анализа частотного спектра и сравнения частотных спектров отраженных сигналов с эталонными спектрами.
Но данное устройство также не обеспечивает распознавание объектов с высокой вероятностью из-за многообразия фазы спектров.
Целью изобретения является увеличение классов распознаваемых объектов, повышение вероятности правильного распознавания объектов и уменьшение уровня ложных тревог.
Указанная цель достигается использованием таких признаков объектов, которые отображают структурные свойства отраженных сигналов.
В качестве таких признаков используются следующие параметры фазовых изображений:
- число пересечений фазовой траектории сигналов заданных граничных линий каждой из фазовых плоскостей,
- время пребывания фазовой траектории сигнала в каждой из областей, заключенных между граничными линиями в соответствующих фазовых полостях.
Описание структурных свойств отраженного радиолокационного (РЛ) сигнала с помощью их фазовых изображений позволяет достаточно простыми техническими средствами образовать сочетание признаков, инвариантных к изменениям большей части параметров движения распознаваемых объектов.
Указанная цель изобретения с использованием приведенных выше признаков достигается тем, что отраженные от объектов РЛ сигналы с выхода РЛС поступают на последовательно соединенные между собой узел временного стробирования сигналов, узел формирования фазовых изображений, узел формирования граничных линий, узел формирования признаков фазовых плоскостей, узел кодирования признаков, узел измерения временных интервалов, узел ввода признаков в классификатор, узел принятия решения.
Один из выходов узла принятия решения соединен с узлом индикации для изображения результатов распознавания в визуальной форме. Другой выход узла принятия решения подключен к узлу выбора программ обучения и классификации, соответствующих видам фазовых плоскостей и типам признаков.
При этом решение о распознавании принимается при отнесении объекта к данному классу в m из N фазовых плоскостей. На один из входов узла выбора программ обучения и классификации подается сигнал зарядки устройства от автомата захвата РЛС.
Выходы выбора программ соединены
- с узлом временного стробирования для обеспечения одного из заданных режимов стробирования отраженного сигнала и выбора фазовых координат,
- с узлом формирования фазовых изображений в одной из задаваемых узлом выбора программ фазовых плоскостей,
- с узлом формирования граничных линий для обеспечения формирования одной из заданных комбинаций граничных зон и областей на фазовых плоскостях,
- с узлом формирования признаков в фазовых плоскостях для обеспечения формирования типа признаков, задаваемого узлом выбора программ,
- с классификаторами для обеспечения классификации объектов в соответствии с заданной программой классификации,
- с узлом синхронизации отдельных узлов устройства.
Выходы узла синхронизации подключены к узлу кодирования признаков и к узлу измерения временных интервалов.
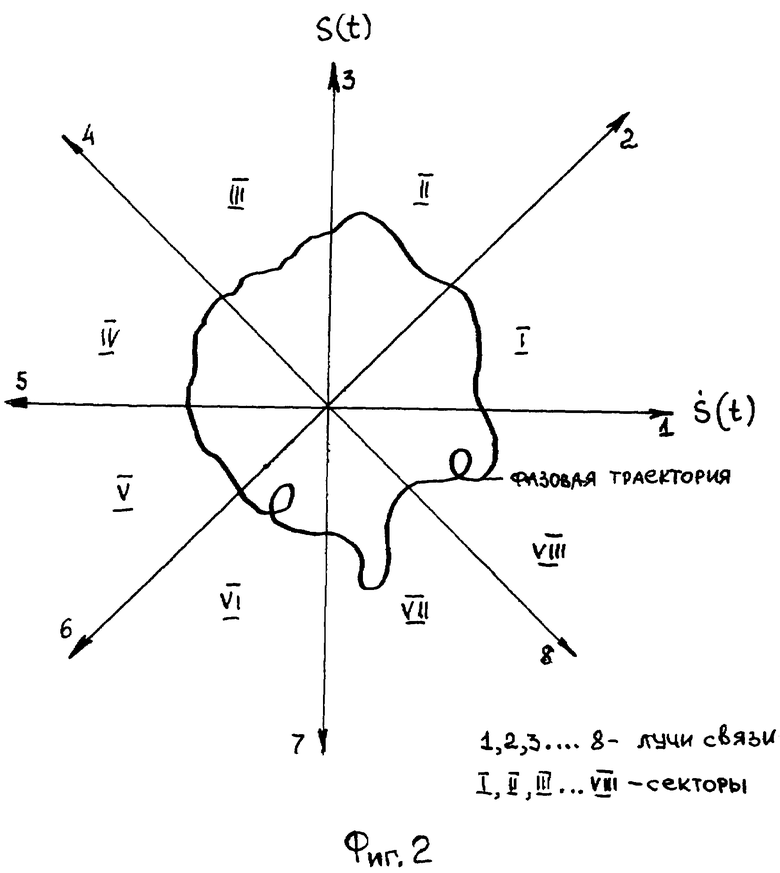
На фиг.1 представлена блок-схема устройства. На фиг.2 показаны сектора на фазовой плоскости.
На фиг.1 цифрами обозначены
1 - РЛС,
2 - узел временного стробирования,
3 - узел формирования фазовых изображений,
4 - узел формирования граничных линий,
5 - узел формирования признаков в фазовых плоскостях,
6 - узел кодирования признаков,
7 - узел измерения временных интервалов,
8 - узел синхронизации,
9 - узел ввода признаков в классификатор,
10 - классификатор,
11 - узел индикации,
12 - узел принятия решения,
13 - узел выбора программ обучения и классификации.
Устройство работает следующим образом.
Радиолокационные сигналы, отраженные от различных объектов, по команде от автомата захвата РЛС 1 поступают с выхода приемного устройства РЛС 1 на узел временного стробирования 2, с выхода которого стробированный сигнал поступает на узел формирования фазовых изображений 3. С выхода узла 3 сигнал поступает на узел формирования граничных линий 4, который обеспечивает формирование заданных граничных линий и областей на фазовых плоскостях. С выхода узла 4 сигналы поступают на узел формирования признаков в фазовых плоскостях 5, с выхода которого сигналы поступают на узел кодирования признаков 6.
Кодированные сигналы поступают на вход узла измерения временных интервалов 7, с помощью которого производится измерение числа кодовых импульсов для каждого из заданных признаков.
Результаты измерений поступают на вход узла ввода признаков в классификатор 9, с помощью которого осуществляется стыковка этих результатов с входами параметров классификатора 10. С помощью классификатора 10 определяется принадлежность данного объекта к тому или иному классу путем сравнения с эталонными образцами заданных классов объектов.
С выхода классификатора 10 результаты классификации подаются на узел принятия решения 12.
К выходу узла принятия решения 12 подключен узел индикации 11, с помощью которого результаты распознавания и принятия решения индуцируются на световое табло.
Если результаты распознавания оказываются неудовлетворительными, то с выхода узла принятия решения 12 подается команда на узел выбора программ обучения и классификации 13.
По этой команде с помощью узла 13 могут быть выполнены следующие процедуры:
- повторный цикл реализования объекта данного класса,
- изменение системы фазовых координат и фазовых плоскостей,
- изменение системы признаков,
- повторный цикл обучения устройства.
Так, при распознавании 10 классов аэродинамических объектов с помощью трех фазовых изображений были получены следующие результаты:
- вероятность правильного распознавания ≥0,95;
- вероятность ложной тревоги ≤0,03;
- время распознавания одного объекта <1,5 с;
- время обучения для одного класса - 30 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| Способ распознавания космических аппаратов по редуцированным радиолокационным изображениям | 2015 |
|
RU2620727C2 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ СЛУЧАЙНЫХ СИГНАЛОВ | 2003 |
|
RU2245561C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| СПОСОБ КЛАССИФИКАЦИИ ОБЪЕКТОВ ПО МЕЖЧАСТОТНОМУ КОРРЕЛЯЦИОННОМУ ПРИЗНАКУ В ОДНОКАНАЛЬНЫХ РЛС | 2023 |
|
RU2809532C1 |
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
Изобретение относится к области радиотехники и может быть использовано на радиолокационных станциях для распознования объектов с колеблющимися оболочками. Техническим результатом является повышение вероятности распознования динамических объектов. Устройство, содержащее радиолокационную станцию, устройство формирования признаков, классификатор, блок принятия решения и индикатор, снабжено устройством временной сегментации, формирователями фазовых изображений граничных линий и признаков в фазовых плоскостях и устройством измерения временных интервалов. Устройство формирования признаков выполнено в виде блока выбора программ обучения и классификации. 2 ил.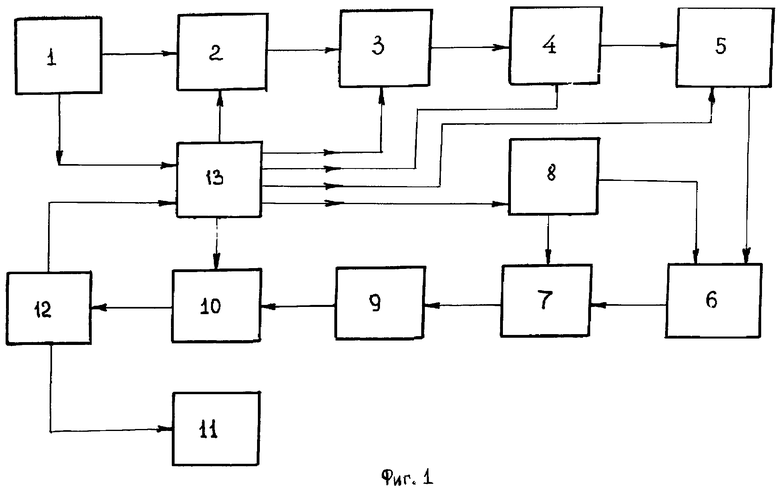
Устройство для распознавания объектов, содержащее соединенные последовательно радиолокационную станцию, устройство формирования признаков, классификатор, блок принятия решения и индикатор, отличающееся тем, что, с целью повышения вероятности распознавания динамических объектов, в нем устройство формирования признаков выполнено в виде блока выбора программ обучения и классификации, входы которого подключены к управляющим входам соединенных последовательно устройства временной сегментации, формирователей фазовых изображений, граничных линий и признаков в фазовых плоскостях и устройства измерения временных интервалов, при этом входы блока выбора программ обучения и классификации соединены с выходами радиолокационной станции и блока принятия решения, и один из выходов подключен к управляющему входу классификатора, информационный вход которого соединен с выходом устройства измерения временных интервалов, вход устройства временной сегментации подключен к выходу радиолокационной станции.
| Патент США №3772689, кл.343-17.1 | |||
| Приспособление для склейки фанер в стыках | 1924 |
|
SU1973A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

