Изобретение относится к механизмам, предназначенным для стабилизации какого-либо устройства, установленного на подвижном основании (объект, носитель) и подвергающегося качке, в частности антенны гидроакустических станций, устанавливаемые на морских судах.
Для стабилизации положения в пространстве какого-либо устройства, расположенного на объекте, подвергающемся воздействию качки, например, на корабле при волнении моря, применяется механизм, в котором, для случая пространственного разнесения элементов привода и основного карданного механизма, применен дополнительный карданный механизм, связанный с основным системой тяг, т.е. шатунов.
При этом, как и во всех ранее известных конструкциях механизмов стабилизации, элементы привода размещаются:
для первого кольца кардана на самом объекте,
для второго кольца кардана на первом кольце.
Такое размещение элементов привода, когда один из них должен располагаться на качающемся карданном кольце, влечет за собой введение гибких сочленений магистралей питания, что усложняет конструкцию и не позволяет даже в случае применения выносного дополнительного карданного механизма, получить требующуюся в ряде случаев предельную компактность всего механизма стабилизации в целом.
Цель, которая должна быть достигнута в результате применения изобретения, заключается в том, чтобы исключить гибкие сочленения в линиях питания привода и упростить весь механизм стабилизации в целом, сделав его более компактным, прочным и простым.
Указанная цель достигается, если оба привода, а не один, как это делается в настоящее время, размещаются вне стабилизируемого устройства на самом основании и связываются с карданными кольцами двухшарнирными параллелограммами.
При этом первое кольцо, ось качания которого связана с основанием (объектом), предназначается для отработки составляющей качки, имеющей меньшую малую амплитуду, т.е. килевую (угол β).
Второе кольцо соответственно отрабатывает составляющую бортовой качки (угол α).
Изложенная сущность изобретения поясняется чертежом, на котором изображен общий схематический вид механизма.
Стабилизируемый цилиндр 1 (антенна гидроакустической станции), неподвижно прикрепленный к наружному кольцу кардана 2, отрабатывающего составляющие бортовой качки α, качается на оси 3. Вращающий момент отработки бортовой качки поступает на него от двигателя 10 через двухшарнирный параллелограмм, состоящий из кривошипа 5 и шатуна 6, со сферическими шарнирами 7 на концах. Роль второго кривошипа выполняет карданное кольцо 2. Длина кривошипа 5 и расстояние от нижнего шарнира 7 до оси 3 одинаковы, причем местоположение шарнира 7 находится на продолжении оси 8, при нулевых значениях углов наклона карданных колец.
Качание цилиндра 1, при отработке составляющих килевой качки β, происходит совместно с кольцом 4 вокруг оси 8, закрепленной к стойке 9, жестко связанной с качающимся основанием (объектом).
Вращающий момент отработки килевой качки поступает на кольцо 4 от второго двигателя 10 через аналогичную систему, состоящую из кривошипа 11 и шатуна 12, на концах которого установлены обычные цилиндрические шарниры 13. Нижний шарнир 13 расположен на кольце 4, на расстоянии от оси стойки 9, равном длине кривошипа 11.
Элементы контроля системы дистанционного управления, связанные с осями двигателей 10, на чертеже не показаны.
Оба двигателя расположены на платформе, жестко связанной с основанием (объектом). Стойка 9 также жестко связана с платформой. Эти конструктивные связи и сама платформа на чертеже не показаны.
При отработке килевой качки возникает силовое воздействие на привод бортовой качки через систему шарнирного параллелограмма, что нагружает оба привода дополнительным моментом сопротивления. Это происходит потому, что вводимое значение бортовой качки, при наличии составляющей килевой качки, отрабатывается на кольце кардана с искажением, определяющимся следующим выражением

Значение α1 всегда больше α.
Коэффициент К определяет кратность длин кривошипа и шатуна, размеры которых выбираются по конструктивным соображениям.
Указанное взаимодействие может быть исключено, если в систему управления привода бортовой качки вводить дополнительный управляющий сигнал, учитывающий текущее значение искажения. В большинстве случаев этого делать не требуется, так как абсолютное значение искажения невелико, находится в пределах допустимых ошибок системы стабилизации и близко к значениям мертвых ходов механизма.
Так, например, для значений качек: килевая 5° и бортовая 15° угол α1 в его наибольшем значении больше вводимого угла α на 3,5 дуговые минуты.
Изобретение относится к механизмам, предназначенным для стабилизации устройств, установленных на подвижном основании и подвергающихся качке, например антенн гидроакустических станций, установленных на морских судах. Механизм стабилизации содержит два двигателя с карданными кольцами, кинематически связанными со стабилизируемым устройством. Оба двигателя жестко связаны с качающимся основанием и соединены с соответствующими карданными кольцами посредством двух шарнирных параллелограммов. Каждый шарнирный параллелограмм через шатунно-кривошипный механизм связан с осью двигателя. Исключаются гибкие сочленения в линиях питания привода. Механизм стабилизации в целом становится более компактным, прочным и простым. 1 ил.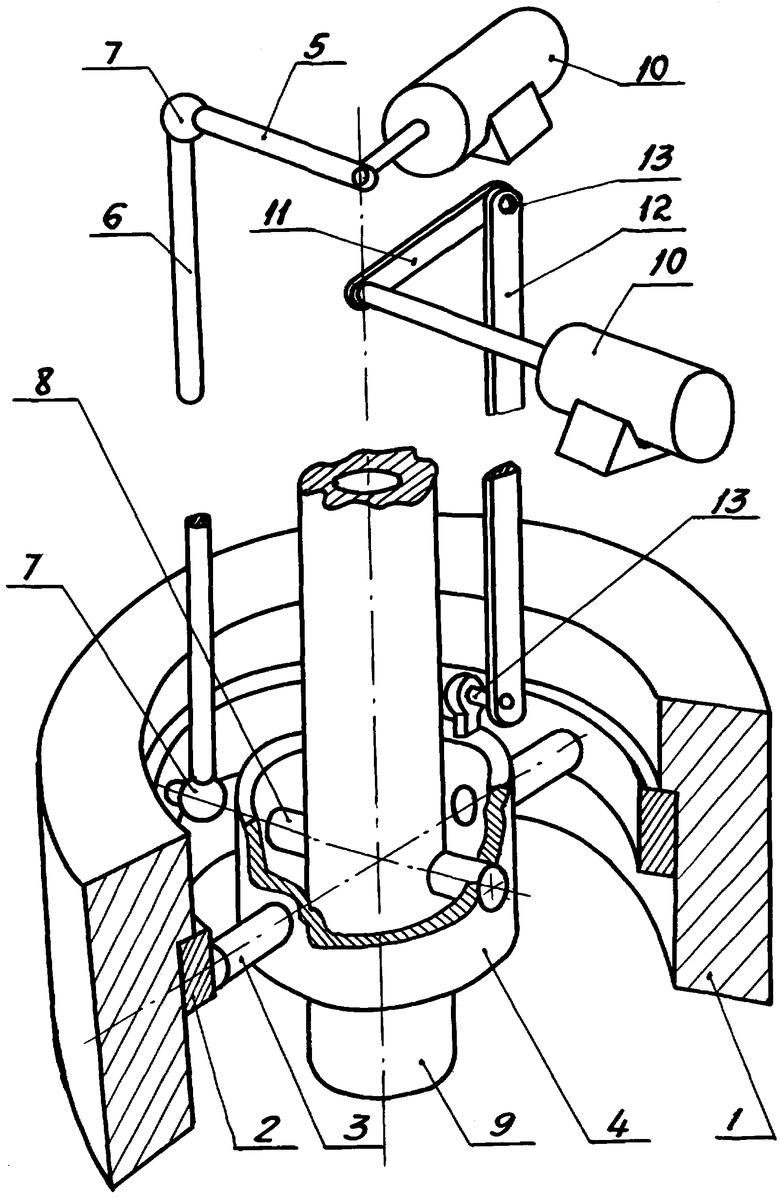
Механизм стабилизации устройств, расположенных на качающемся основании, например антенны гидроакустических станций, содержащий два двигателя с карданными кольцами, кинематически связанными со стабилизируемым устройством, отличающийся тем, что, с целью упрощения конструкции, оба двигателя жестко связаны с качающимся основанием и соединены с соответствующими карданными кольцами посредством двух шарнирных параллелограммов, каждый из которых через шатунно-кривошипный механизм связан с осью двигателя.

