Изменение курсового угла на цель, измеряемого гидроакустическими станциями, вызывается как относительным перемещением подводной лодки и цели (изменение пеленга), так и угловыми перемещениями самой подводной лодки, связанными с ее циркуляцией, рысканием на курсе и качкой. Сравнительная медленность изменений пеленга, имеющая место в особенности при больших дальностях до цели, обуславливает, при отсутствии угловых перемещений подводной лодки, возможность применения в измерительных устройствах значительного времени осреднения, позволяющего уменьшить погрешность пеленгования за счет сглаживания флюктуационных помех.
Однако инерционность измерительного тракта не позволяет правильно отрабатывать относительно быстрые изменения курсового угла, происходящие, например, в силу рыскания подводной лодки на курсе. Динамические ошибки измерения, связанные с инерционностью тракта, могут быть сравнимы с амплитудой рыскания и даже превосходить ее.
Для устранения динамической ошибки, возникающей за счет рыскания, в состав современных гидроакустических станций вводится специальное устройство, так называемый "привод курсовой стабилизации", который при изменении курса подводной лодки независимо от основного измерительного тракта по данным от гирокомпаса синхронно поворачивает характеристику направленности станции на угол, равный изменению курса (в обратном направлении).
Благодаря этому устройству использование значительного времени осреднения не сопровождается возникновением существенных динамических ошибок при рыскании подводной лодки.
Существенным недостатком применяемой в настоящее время системы исключения динамических ошибок пеленгования при угловых перемещениях пеленгатора является отсутствие учета бортовой и килевой качки носителя.
Между тем, даже при относительно малых кренах и дифферентах, имеющих место на погруженной подводной лодке, оказывается невозможным в настоящее время пренебрегать различием между истинным курсовым углом (q), относящимся к горизонтальной плоскости и фактически измеряемым "палубным" курсовым углом (qн), относящимся к плоскости, перпендикулярной оси акустической антенны. Это различие особенно велико при наклонном к горизонту приходе звукового луча от цели. Расчет показывает, что, например, при приходе звукового луча под углом 20° к горизонту и наклоне палубы подводной лодки на 1° разность между q и qн может достигать 20′, что значительно превышает погрешность пеленгования современными гидроакустическими станциями в условиях горизонтальной палубы подводной лодки.
При статическом наклоне подводной лодки, характеризуемом углами крена θк и дифферента Ψо, тракт автоматического сопровождения цели отрабатывает величину палубного курсового угла qн, по которому (при наличии данных об углах θк, Ψо и угле наклона луча εн) на основе известных формул преобразования координат может быть в этом случае вычислен и горизонтальный угол q.
При качании подводной лодки около горизонтального положения тракт автоматического сопровождения цели, отрабатывая изменение qн с некоторой динамической ошибкой Δ, значительной в силу инерционности тракта, выдает на выход в качестве курсового угла на цель величину qн+Δ, отличающуюся как от q, так и от qн.
Динамическая ошибка Δ, возникающая при пеленговании в условиях качки подводной лодки аналогична динамической ошибке, возникающей при рыскании, для устранения которой в систему приводов компенсатора современных гидроакустических станций включается упомянутый выше привод курсовой стабилизации.
Существо описываемого предложения состоит в том, что в предлагаемой системе приводов динамическая ошибка, связанная с инерционностью измерительного тракта, устраняется также и в условиях качки подводной лодки с помощью некоторого дополнительного привода, поворачивающего характеристику направленности синхронно с изменением крена θк и дифферента Ψо подводной лодки на величину разности δ=q-qн. Эта разность может быть выработана по данным о θк и Ψо, синхронно поступающим от гировертикали, с использованием данных о qн и εн от гидроакустической станции.
Описание системы приводов компенсатора.
В настоящее время в трактах автоматического сопровождения цели шумопеленгаторных станций, подводных лодок используется система приводов компенсатора, блок-схема которой представлена на фиг.1а.
Обозначения на фиг.1a и 1б следующие:
1. компенсатор,
2. привод обратной связи (управляемый сигналом от компенсатора),
3. привод для обработки изменений курса своего К,
4. дифференциал.
Предлагается дополнить систему приводов компенсатора, согласно фиг.1б, блоком 5 синхронной выработки разности δ=q-qн между курсовым углом горизонтальным и палубным, соединенным с компенсатором через дифференциал 6. Блок 5 соединяется с навигационной аппаратурой подводной лодки линиями синхронной передачи углов крена θк и дифферента Ψo, с гидроакустической аппаратурой - линиями ввода курсового угла qн и угла наклона луча εн (линии передачи в систему приводов величин θк, Ψо, qн, εн и курса своего К на блок-схемах 1а и 1б не показаны). Устройство решающего блока 5 соответствует зависимости

что означает выработку разности δ в линейном относительно Ψо и θк приближении и вполне допустимо при практически возможных значениях Ψо, θк и εн.
Конструктивное оформление системы приводов, обеспечивающей компенсацию собственных угловых перемещений подводной лодки с учетом качки, может быть различным и зависит от конструкции приборов гидроакустической станции и навигационных приборов (гировертикали, вырабатывающей Ψо и θк, гироазимута, вырабатывающего курс К подводной лодки).
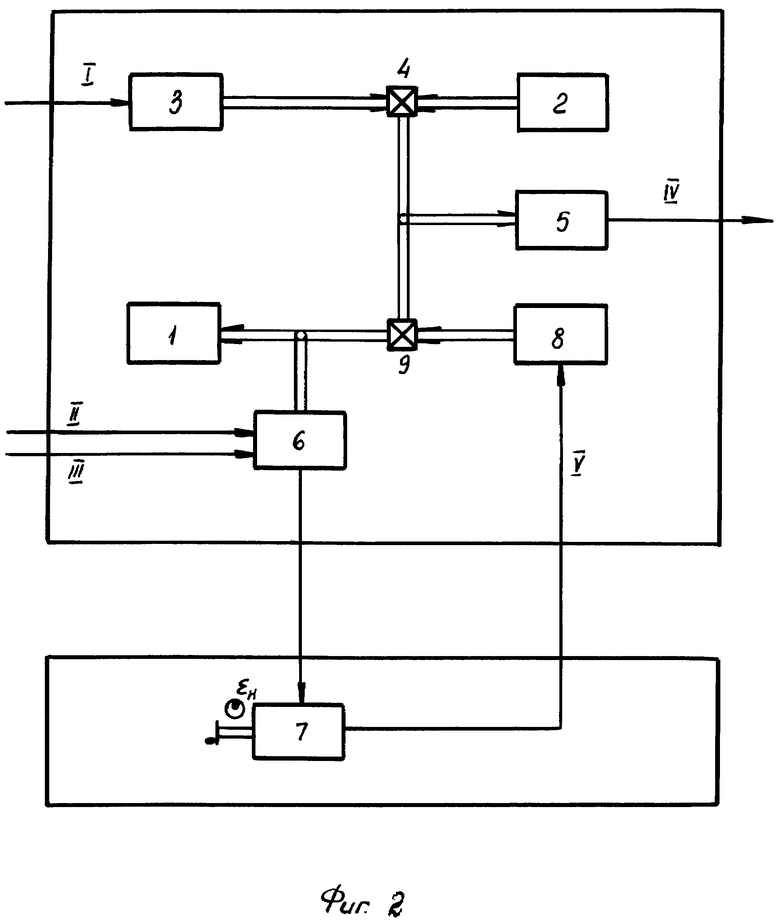
На фиг.2 дан пример выполнения системы приводов, относящийся к случаю размещения ее основных узлов в одном приборе с компенсатором тракта автоматического сопровождения цели.
Предполагается, что гировертикаль выдает данные по Ψо и θк с датчиков типа линейных вращающихся трансформаторов (ЛВТ), а прием курса от гироазимута осуществляется с помощью простейшей следящей системы.
На фиг.2 арабскими цифрами обозначены следующие обычные элементы и узлы тракта автоматического сопровождения цели:
1. компенсатор тракта,
2. привод обратной связи,
3. принимающий курса,
4. дифференциал для ввода изменений курса,
5. датчик курсового угла.
Новыми узлами и элементами являются:
6. вращающийся трансформатор (СКВТ),
7. вращающийся трансформатор (ЛВТ),
8. следящий привод,
9. дифференциал.
Римскими цифрами обозначены линии:
1 - ввода курса К от гироазимута,
2 - ввода крена θк от гировертикали,
3 - ввода дифферента Ψо от гировертикали,
4 - выдачи курсового угла q,
5 - отработки разности δ=q-qн.
Вращающиеся трансформаторы поз.6 и 7 вырабатывают разность δ (в виде электрического сигнала) с учетом курсового угла qн, углов Ψо и θк и угла εн наклона оси характеристики направленности.
Следящий привод (поз.8) передает величину δ на дифференциал 9, через который она поступает в кинематическую линию отработки курсового угла.
Шкала, по которой вводится угол наклона εн, размечена пропорционально tgεн (в пределах ±30°), благодаря чему при установке величины εн соответственно наклону характеристики направленности (В современных шумопеленгаторных станциях наклон характеристики направленности устанавливается вручную на пульте станции в пределах ±25°. При введении автоматического сопровождения цели по углу наклона предлагаемое устройство целесообразно дополнить блоком автоматического ввода εн. Поскольку при этом выработка тангенсной зависимости несколько усложняет приборную реализацию, можно, незначительно загрубляя выработку величины δ, разворачивать ЛВТ поз.7 по εн вместо tgεн, поскольку εн≅tgεн.) в ЛВТ поз.7 вырабатывается электрический сигнал, пропорциональный (θкcosqн-Ψоsinqн)·tgεн, соответственно формуле (1).
Предположим, что в некоторый момент времени ось характеристики направленности шумопеленгаторной станции горизонтальной подводной лодки установилась в направлении на цель, а затем подводная лодка под влиянием рыскания и качки получила приращение курса δ' и приняла крен θк и дифферент Ψо. Благодаря вводу через дифференциалы 4 и 6 (фиг.1б) (4 и 9 на фиг.2) величины δ' и разности δ=q-qн, компенсатор тракта автоматического сопровождения цели повернется таким образом, что ось характеристики направленности останется совмещенной с направлением на цель.
На привод обратной связи тракта автоматического сопровождения цели в этом случае воздействует только медленное изменение пеленга, которое отрабатывается приводом с минимальной ошибкой. С датчика 5 (фиг.2) при этом выдается значение курсового угла в горизонтальной системе координат (q).
Заключение.
Введение системы компенсации собственных угловых перемещений подводной лодки, учитывающей, помимо рыскания, также и качку, позволит реализовать достигнутую в настоящее время точность пеленгаторов, сняв практически трудно выполнимые в боевых условиях требования по точному горизонтированию подводной лодки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШУМОПЕЛЕНГАТОРНАЯ СТАНЦИЯ | 1988 |
|
SU1840459A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ СКРЫТНОГО СЛЕЖЕНИЯ ЗА ПОДВОДНОЙ ЛОДКОЙ | 2001 |
|
RU2192655C2 |
| САМОСТАБИЛИЗИРУЮЩЕЕСЯ УСТРОЙСТВО ДЛЯ АНТЕННЫХ ПОСТОВ И ПРИБОРОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2204873C1 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2008 |
|
RU2384456C2 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1974 |
|
SU1840684A1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| САМОСТАБИЛИЗИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ АНТЕННЫХ ПОСТОВ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ И ДРУГИХ ДАТЧИКОВ СУДОВОЙ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 2001 |
|
RU2205476C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
Устройство приводов компенсатора тракта автоматического сопровождения цели шумопеленгаторной станции для подводных лодок содержит компенсатор, привод обратной связи, привод для обработки изменений курса носителя и дифференциал. В устройство дополнительно введен блок выработки разности между горизонтальным и измеренным курсовыми углами, связанный с помощью дополнительного дифференциала с компенсатором. При этом блок соединен с навигационной гидроакустической аппаратурой, откуда поступают в него необходимые данные. Технический результат - повышение точности пеленгования в условиях качающейся подводной лодки. 2 ил.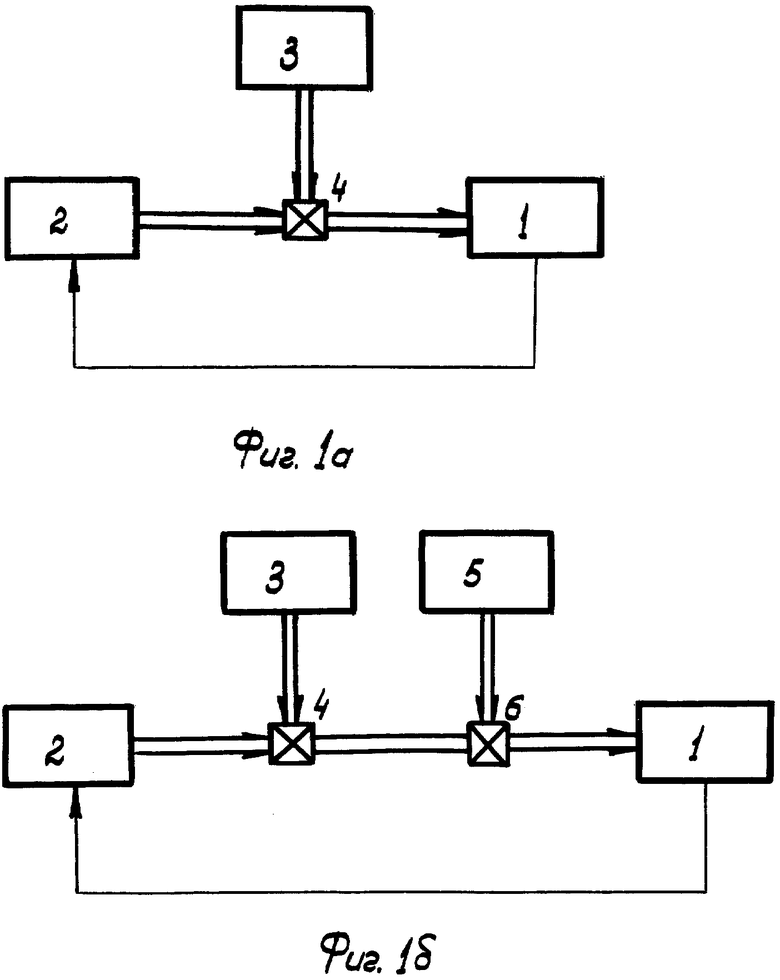
Устройство приводов компенсатора тракта автоматического сопровождения цели шумопеленгаторной станции для подводных лодок, содержащее компенсатор, привод обратной связи, привод для отработки изменений курса носителя и дифференциал, отличающееся тем, что, с целью повышения точности измерений за счет уменьшения ошибок, возникающих при качке носителя, в него дополнительно введен блок выработки разности между горизонтальным и измеренным курсовыми углами, связанный с помощью дополнительного дифференциала с компенсатором, при этом блок соединен с навигационной и гидроакустической аппаратурой, откуда поступают в него необходимые данные.

