Изобретение относится к области авиационной и авиационно-космической техники и может быть использовано для управления воздушно-комическим самолетом (ВКС) при полете в атмосфере.
Одним из аналогов предлагаемого устройства является устройство управления боковым движением (демпфер боковых колебаний) ЛА статически неустойчивого по рысканию  , но динамически устойчивого
, но динамически устойчивого  .
.
В этом устройстве, управляемом с помощью функционала δэзад=тωx+кωy, устойчивость достигается за счет выбора ориентации датчика угловой скорости (ДУС) крена ωx. Одновременное использование двух сигналов ωx и ωx эквивалентно повороту оси чувствительности ДУСа демпфера крена. Недостатком этого устройства является узкая область устойчивости движения, определяемая выражением
 Здесь
Здесь 
В качестве прототипа взято наиболее близкое к предлагаемому изобретению по технической сущности и достигаемому результату устройство управления боковым движением ВКС "Спейс Шаттл".
Прототип содержит:
блок формирования программного значения угла крена γпрогр. датчик угла крена, датчик угловой скорости рыскания ωx, бортовой вычислитель угла скольжения, датчик угловой скорости крена, суммирующий усилитель, в котором формируется сигнал рассогласования по крену Δγ=γ-γпрогр., ограничитель сигнала Δγ, вычислитель сигнала sin·Δγогр.,
фильтр угловой скорости рыскания 
фильтр угла скольжения 
фильтр угла скольжения 
релейный усилитель, в котором формируются сигнал, управляющий СГД рыскания.
В суммирующем усилителе формируется сигнал, управляющий элеронами δэу, который поступает в ограничитель сигнала δэу и далее на привод элеронов. Угол атаки α и угол скольжения β вычисляется на борту ЛА. Управление креном в этой схеме осуществляется с помощью СГД рыскания. Алгоритм управления СГД рыскания имеет вид
∑y=sinα·Δγогр-Wωy·ωy+WβСГД·β
Недостатком устройства-прототипа являются:
использование СГД рыскания и элеронов. При управлении креном только элеронами боковое движение ВКС будет неустойчиво.
Такое устройство является сложным, т.к. необходима СГД рыскания и аппаратура для вычисления на борту угла скольжения и его производных.
Целью данного изобретения является улучшение динамических характеристик путем расширения области устойчивости бокового движения ЛА и упрощение устройства.
Поставленная цель изобретения достигается тем, что устройство управления боковым движением ЛА, имеющего обратную суммарную эффективность элеронов, при полете в атмосфере включает блок формирования программного значения угла крена γпрогр. датчик угла крена, выходы которых поступают на вход первого суммирующего сигнала рассогласования (по крену Δγ), датчик угловой скорости крена ωx, выход которого соединен с первым входом суммирующего усилителя, а также второй ограничитель сигнала выходом, подключенным ко входу привода элеронов, введен фильтр угловой скорости крена, через который датчик угловой скорости крена соединен со вторым входом второго суммирующего усилителя, выход первого ограничителя сигнала рассогласования (по крену Δγ) соединен с третьим входом второго суммирующего усилителя, выход которого поступает на вход второго ограничителя сигнала.
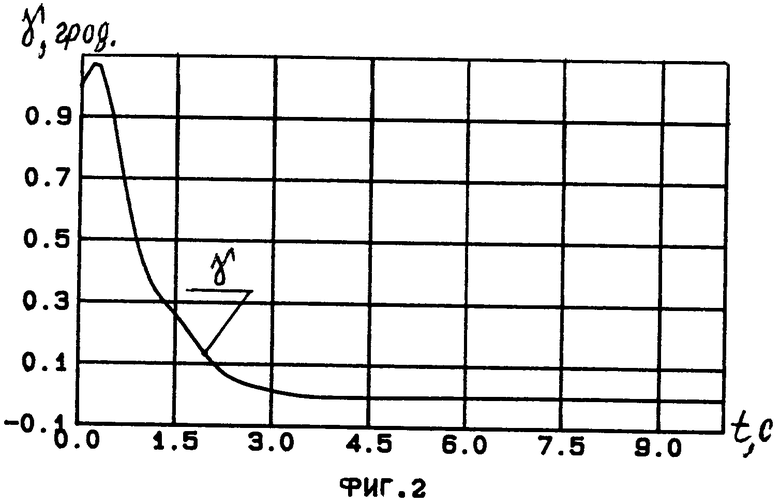
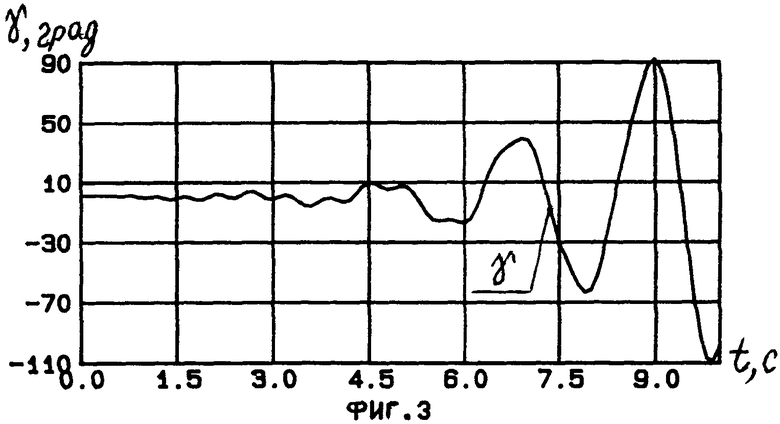
Данное изобретение иллюстрируется чертежами, где на фиг.1 представлена схема предлагаемого устройства; на фиг.2 и 3 представлены осциллограммы переходных процессов по углу крена, полученные при математическом моделировании бокового движения ЛА.
Устройство (см. фиг.1) содержит блок 1 формирования программного значения угла крена γпрогр., датчик 2 угла крена γ, первый суммирующий усилитель 3, в котором формируется сигнал рассогласования по крену Δγ, первый ограничитель 4 сигнала рассогласования по крену, датчик 5 угловой скорости рыскания ωy, датчик 6 угловой скорости крена ωx, блок фильтра сигнала угловой скорости крена 7, второй суммирующий усилитель 8 сигнала управления элеронами δэу, второй ограничитель 9 сигнала δэу. Выход второго ограничителя соединен со входом привода элеронов 10.
Устройство работает следующим образом.
Сигналы с блока формирования программного значения угла крена и датчика угла крена сравниваются на суммирующем усилителе 3, выход которого поступает на вход первого ограничителя сигнала рассогласования по крену. Сигнал с датчика 6 угловой скорости крена поступает на вход блока 7 фильтра угловой скорости крена и суммируется на втором суммирующем усилителе 8 с сигналом угловой скорости рыскания с датчика 5 и сигналом рассогласования угла крена с выхода первого ограничителя 4. Во втором суммирующем усилителе 8 формируется сигнал:
δэу=D·Δγ+Fx·ωx+к·ωy,
где Δγ=γпрогр.,
D>0, к>0 - коэффициенты усиления соответственно сигналов рассогласования по углу крена и угловой скорости рыскания;
 - передаточная функция фильтра сигнала угловой скорости крена.
- передаточная функция фильтра сигнала угловой скорости крена.
Tx>T1; Tx>0; Tωx>0.
Сигнал с выхода второго суммирующего усилителя 8 поступает на вход второго ограничителя 9 и далее на вход привода эелронов 10.
На фиг.2 и 3 представлены осциллограммы переходных процессов, полученные при математическом моделировании бокового движения ЛА при отработке начальных отклонений угла крена с СУ соответственно с заявленным устройством, включающим блок фильтра и без блока фильтра угловой скорости крена. При моделировании величины постоянного запаздывания приводов элеронов приняты равными=0,018 с.
Математическое моделирование и аналитические расчеты показали, что использование предлагаемого устройства обеспечивает расширение области устойчивости бокового движения, дает возможность получить устойчивую систему даже для неустойчивого ЛА, повышает точность выдерживания угла крена при существенном упрощении аппаратурной реализации, что достигается за счет возможности использования более простых информационных датчиков и отказа от применения СГД.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335005C1 |
| АВТОМАТ УСТОЙЧИВОСТИ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1988 |
|
SU1826781A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335009C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА С ИНТЕГРИРУЮЩИМ ПРИВОДОМ | 2007 |
|
RU2335008C1 |
| СИСТЕМА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА СО СТАТИЧЕСКИМ ПРИВОДОМ | 2007 |
|
RU2335006C1 |
| СПОСОБ ПОДАВЛЕНИЯ БОКОВЫХ КОЛЕБАНИЙ МАНЕВРЕННОГО САМОЛЕТА НА БОЛЬШИХ УГЛАХ АТАКИ | 2009 |
|
RU2401220C1 |
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КРЕНУ | 2005 |
|
RU2305308C1 |
Изобретение относится к области авиационной и авиационно-космической техники и может быть использовано для управления воздушно-космическим самолетом при полете в атмосфере. Техническим результатом является улучшение динамических характеристик устройства путем расширения области устойчивости бокового движения и упрощение устройства. Устройство управления боковым движением летательного аппарата содержит блок формирования программного значения угла крена и датчик угла крена, два суммирующих усилителя, два ограничителя сигнала, датчики угловых скоростей крена и рыскания и привод элеронов. В устройство введены фильтр угловой скорости крена, выходом соединенного со вторым входом второго суммирующего усилителя. Выход первого ограничителя сигнала соединен с третьим входом второго суммирующего усилителя, выходом подключенного к входу второго ограничителя сигналов. 3 ил.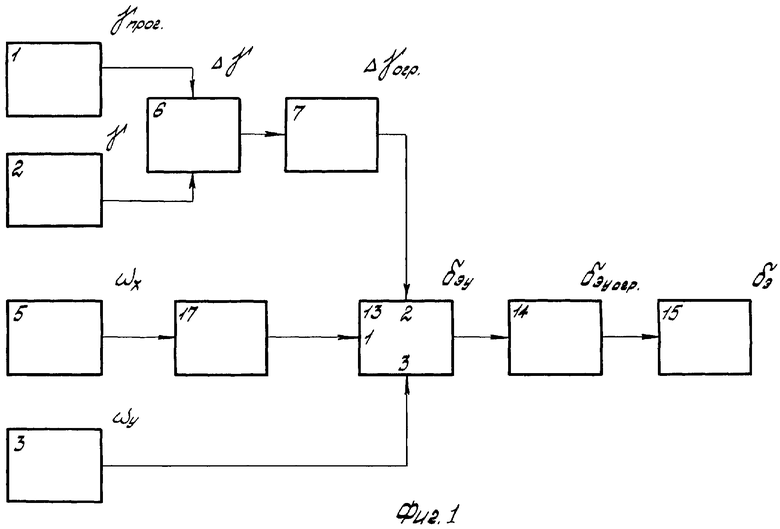
Устройство управления боковым движением летательного аппарата, имеющего обратную суммарную эффективность элеронов при полете в атмосфере, содержащее блок формирования программного значения угла крена и датчик угла крена, выходы которых соединены со входом первого суммирующего усилителя, выходом соединенного со входом первого ограничителя сигнала, датчик угловой скорости крена, датчик угловой скорости рыскания, выход которого соединен с первым входом второго суммирующего усилителя, второй ограничитель сигнала, выходом подключенный ко входу привода элеронов, отличающееся тем, что, с целью улучшения динамических характеристик устройства путем расширения области устойчивости бокового движения летательного аппарата и упрощения устройства, в него введен фильтр угловой скорости крена, выход которого соединен со вторым входом второго суммирующего усилителя, выход первого ограничителя сигнала соединен с третьим входом второго суммирующего усилителя, выходом подключенного к входу второго ограничителя сигнала.
| Техническая информация изд | |||
| ЦАГИ, №17-18, 19. |

