Изобретение относится к бортовым системам автоматического управления аэродинамическими беспилотными летательными аппаратами в условиях широкого диапазона их применения по скорости и высоте полета.
Известна система автоматического управления летательным аппаратом по крену, в которой содержится блок задающего воздействия, блок сравнения, суммирующий усилитель, датчики состояния и исполнительное устройство [1].
Недостатком известной реализации является ограниченность функциональных возможностей в условиях нестационарности параметров летательного аппарата, вызванных изменениями скорости, высоты полета и массы летательного аппарата.
Наиболее близким к предлагаемому изобретению является система управления летательным аппаратом, содержащая в канале крена датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла крена и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные первый сумматор и исполнительное устройство [2].
Недостатком этой системы являются ограниченные функциональные возможности по устойчивости и точности, обусловленные отсутствием средств решения проблемы нестационарности летательного аппарата.
Решаемой в предложенной системе управления технической задачей является расширение функциональных возможностей системы и повышение устойчивости и точности процессов управления. Предложенным построением системы управления достигается функциональная возможность адаптации параметров регулирующей части и повышение показателей устойчивости и качества в условиях широкого диапазона параметров летательного аппарата.
Указанный технический результат достигается тем, что в известную систему управления движением летательного аппарата по крену, содержащую датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла крена и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные первый сумматор и исполнительное устройство, дополнительно введены первый и второй задатчики опорного сигнала, последовательно соединенные датчик текущей массы, первый блок деления, второй вход которого подключен к выходу первого задатчика опорного сигнала, второй сумматор, блок формирования обратной величины сигнала, первый блок масштабирования, цифровой блок умножения, второй вход которого соединен с выходом блока сравнения, и цифроаналоговый преобразователь, выход которого соединен с первым входом первого сумматора, последовательно соединенные датчик высоты полета и второй блок деления, второй вход которого соединен с выходом второго задатчика опорного сигнала, а выход - со вторым входом первого сумматора, последовательно соединенные датчик скорости полета и второй блок масштабирования, выход которого соединен с третьим входом второго сумматора, последовательно соединенные третий блок масштабирования, вход которого соединен с выходом блока формирования обратной величины сигнала, и цифроаналоговый блок умножения, второй вход которого соединен с выходом датчика угловой скорости, а выход - со вторым входом первого сумматора.
Действительно, при этом обеспечивается отработка сигналов управления с максимальным качеством в широком диапазоне изменения высоты, скорости полета и массы летательного аппарата посредством введения средств адаптации и реализации части системы управления на основе бортовой цифровой вычислительной машины (БЦВМ).
Построение системы управления осуществляется следующим образом.
Уравнения углового движения летательного аппарата непосредственно по крену (без учета перекрестных связей из канала курса), например, по [3] описываются в виде:
где: C1, С3 - динамические коэффициенты летательного аппарата;
γ - угол крена;
ωх - угловая скорость по крену;
δэ - угол отклонения рулевых поверхностей (элеронов) исполнительным устройством.
Закон управления, формирующий сигнал управления для исполнительного устройства, формируется в виде:

где Δγ - сигнал рассогласования:

здесь γзад- сигнал задающего воздействия по крену;
K1, K2 - передаточные числа.
Приняв безынерционную отработку исполнительным устройством сигнала управления, т.е. положив δэ≡σэ из уравнений (1)÷(3) получаем описание процессов регулирования в замкнутом контуре (закон управления - летательный аппарат) в виде:

или

Характеристическое уравнение замкнутой системы управления по системе уравнений (5) имеет вид:

Уравнение (6) позволяет оценить параметры закона управления по уравнению (2) с динамическими коэффициентами летательного аппарата C1 и С3 по уравнению (1). Для обеспечения требуемых характеристик устойчивости и качества необходимо обеспечить в процессе полета выполнение условий постоянства коэффициентов характеристического уравнения, т.е.

В (7) коэффициент C1, характеризующий собственное демпфирование летательного аппарата, достаточно мал, слабо изменяется и не является характерным, доминирующим в сравнении с параметром С3К2, определяющим демпфирование замкнутой системы управления в целом, и может быть учтен константой. Поэтому условия сохранения требуемых показателей устойчивости и качества, исходя из (7), могут быть определены как:

где С3 - коэффициент эффективности органов управления, равный, например, по [3]:

где  - производная коэффициента эффективности по отклонению элеронов δэ;
- производная коэффициента эффективности по отклонению элеронов δэ;
q - скоростной напор:

ρ - плотность воздуха на текущей высоте полета, ρ=ρ(Н);
V - скорость полета;
s, l - характерные геометрические параметры летательного аппарата;
Jx - момент инерции летательного аппарата в канале крена.
Параметр  по текущему состоянию является в основном функцией числа Маха:
по текущему состоянию является в основном функцией числа Маха:

где а - скорость звука на текущей высоте полета, для аэродинамического летательного аппарата меняется в небольших пределах и может быть принята постоянной - осредняемой или максимальной для данной области высот (максимальной потому, что наиболее критичной для области устойчивости является наибольшее значение коэффициента эффективности С3). Этот коэффициент можно считать стабильным в окрестности балансировочных значений текущих углов летательного аппарата.
Момент инерции Jx тесно связан с текущей массой m по прямо пропорциональной зависимости.
Таким образом, исходя из уравнений (8) и на основе уравнений (9)÷(11) с учетом изложенного для обеспечения процессов строгой адаптации необходимо идентифицировать параметр С3 и по нему сформировать функцию адаптации - обозначим ее как λ, т.е. пусть λ=С3.
Тогда из уравнений (8) получаем алгоритмы адаптации:
здесь 
Также на основании изложенного можно говорить, что λ является функцией Н, V, m, т.е.

Для формирования λ приняты следующие положения:
1) С3 и λ пропорциональны V;
2) С3 и λ обратно пропорциональны Н;
3) С3 и λ обратно пропорциональны m.
Таким образом, в качестве основного закона формирования сигнала идентификации - адаптации может быть принято, например:

где а1, а2, а3=const.
Наиболее точно достаточно сложные законы идентификации и адаптации (14) и (12) могут быть реализованы благодаря применению средств БЦВМ.
Здесь параметры V и Н принимаются непосредственно от соответствующих датчиков, а текущая масса m рассчитывается датчиком на основе знания начальной массы m0 летательного аппарата и текущего расхода топлива  :
:

где t - текущее время.
На основе изложенного рассматривается предлагаемая система управления, имеющая цифровую и аналоговую части и для их сочетания цифроаналоговые элементы.
На чертеже представлена блок-схема бортовой цифроаналоговой адаптивной системы управления летательным аппаратом по крену.
Система управления содержит датчик угла 1 (ДУ), датчик угловой скорости 2 (ДУС), последовательно соединенные задатчик угла крена 3 (ЗУК) и блок сравнения 4 (БС), второй вход которого соединен с выходом датчика угла 1, последовательно соединенные первый сумматор 5 (1 С) и исполнительное устройство 6 (ИУ), первый 7 (1 ЗОС) и второй 8 (2 ЗОС) задатчики опорного сигнала, последовательно соединенные датчик текущей массы 9 (ДТМ), первый блок деления 10 (1 БД), второй вход которого подключен к выходу первого задатчика опорного сигнала 7, второй сумматор 11 (2 С), блок формирования обратной величины сигнала 12 (БФОВС), первый блок масштабирования 13 (1 БМ), цифровой блок умножения 14 (ЦБМ), второй вход которого соединен с выходом блока сравнения 4, и цифроаналоговый преобразователь 15 (ЦАП), выход которого соединен с первым входом первого сумматора 5, последовательно соединенные датчик высоты полета 16 (ДВП) и второй блок деления 17 (2 БД), второй вход которого соединен с выходом второго задатчика опорного сигнала 8, а выход - со вторым входом второго сумматора 11, последовательно соединенные датчик скорости полета 18 (ДСП) и второй блок масштабирования 19 (2 БМ), выход которого соединен с третьим входом второго сумматора 11, последовательно соединенные третий блок масштабирования 20 (3 БМ), вход которого соединен с выходом блока формирования обратной величины сигнала 12, и цифроаналоговый блок умножения 21 (ЦАБУ), второй вход которого соединен с выходом датчика угловой скорости 2, а выход - со вторым входом первого сумматора 5.
Летательный аппарат условно показан на чертеже пунктирной линией.
Аналоговая часть системы управления включает в себя датчик угловой скорости 2, исполнительное устройство 6 и первый сумматор 5. Цифровые каналы основного контура - это датчики 1, 9, 16, 18 и блоки 7, 8, 10, 11, 12, 13, 14, 19, 20. Блоки 15 и 21 являются цифроаналоговыми.
Система управления работает следующим образом.
Сигнал управления (координатный) σэ для подачи на исполнительное устройство 6 формируется датчиками и блоками 1, 2, 3, 4, 5, 14, 15, 21 по уравнениям (2) и (3), при этом сигнал угла крена γ снимается с датчика угла 1, сигнал угловой скорости по крену ωx снимается с датчика угловой скорости 2, сигнал задающего воздействия по крену γзад формируется задатчиком угла крена 3, а сигнал рассогласования Δγ (Δγ=γ-γзад) формируется блоком сравнения 4. Адаптивные коэффициенты K1 и К2 формируются на выходе первого 13 и третьего 20 блоков масштабирования соответственно по сигналу  в соответствии с (12). При этом сигнал
в соответствии с (12). При этом сигнал  формируется блоком формирования обратной величины сигнала 12, а сигнал λ, являющийся сигналом идентификации, формируется 2-м сумматором 11 в соответствии с (14). Также в соответствии с (14) сигналы Н, V, m выдаются датчиками высоты полета 16, скорости полета 18 и текущей массы 9 соответственно, а коэффициенты a1, а2 и а3 - для уравнения (14) - выставлены соответственно во втором блоке масштабирования 19, во втором 8 и первом 7 задатчиках опорного сигнала. В цифровом блоке умножения 14 и в цифроаналоговом блоке умножения 21 формируются компоненты сигнала управления K1Δγ и К2ωх всоответствии с уравнением (2). Цифроаналоговый преобразователь 15 преобразует цифровой сигнал К1Δγ в аналоговую форму. Цифроаналоговый блок умножения 21 производит перемножение аналогового сигнала ωx на коэффициент К2, преобразованный в этом блоке в аналоговую форму, выходной сигнал К2ωx с выхода блока 21 является аналоговым.
формируется блоком формирования обратной величины сигнала 12, а сигнал λ, являющийся сигналом идентификации, формируется 2-м сумматором 11 в соответствии с (14). Также в соответствии с (14) сигналы Н, V, m выдаются датчиками высоты полета 16, скорости полета 18 и текущей массы 9 соответственно, а коэффициенты a1, а2 и а3 - для уравнения (14) - выставлены соответственно во втором блоке масштабирования 19, во втором 8 и первом 7 задатчиках опорного сигнала. В цифровом блоке умножения 14 и в цифроаналоговом блоке умножения 21 формируются компоненты сигнала управления K1Δγ и К2ωх всоответствии с уравнением (2). Цифроаналоговый преобразователь 15 преобразует цифровой сигнал К1Δγ в аналоговую форму. Цифроаналоговый блок умножения 21 производит перемножение аналогового сигнала ωx на коэффициент К2, преобразованный в этом блоке в аналоговую форму, выходной сигнал К2ωx с выхода блока 21 является аналоговым.
Исполнительное устройство 6 отрабатывает суммарный аналоговый управляющий сигнал σэ, отклоняя элероны на величину δэ.
Значительная часть системы управления, в том числе сигналы функций идентификации и адаптации, несложно реализуются алгоритмически, а также все звенья и блоки могут быть реализованы на элементах автоматики и вычислительной техники, например по [4, 5].
Предложенная бортовая цифроаналоговая адаптивная система управления движением летательного аппарата по крену позволяет расширить функциональные возможности системы и повысить точность управления.
Источники информации
1. И.А. Михалев и др. Системы автоматического управления самолетом. М.: Машиностроение, 1987, с.174.
2. Патент РФ №2251136, кл. G05D 1/08, 24.12.02 г.
3. А.А. Лебедев, Л.С. Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Машиностроение, 1973, с.486.
4. В.Б. Смолов. Функциональные преобразователи информации. Л.: Энергоиздат, Ленинградское отделение, 1981, с.22, 41.
5. А.У. Ялышев, О.И. Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.107, 126.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВАЯ ЦИФРОАНАЛОГОВАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2009 |
|
RU2391694C1 |
| БОРТОВАЯ СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ДЛЯ УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2338236C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491600C1 |
| СПОСОБ ФОРМИРОВАНИЯ ЦИФРОАНАЛОГОВОГО СИГНАЛА СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ПО КУРСУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2491602C1 |
| СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ПОЛЕТА МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2413274C1 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
Изобретение относится к области приборостроения и может найти применение в бортовых системах автоматического управления аэродинамическими беспилотными летательными аппаратами в условиях широкого диапазона их применения по скорости и высоте полета. Технической результат - расширение функциональных возможностей системы за счет повышения устойчивости и точности процессов управления. Для достижения данного результата система управления содержит датчики высоты полета, скорости полета, угла, угловой скорости и текущей массы, задатчик угла крена и два задатчика опорного сигнала, блок сравнения, исполнительное устройство, два сумматора, два блока деления, блок формирования обратной величины сигнала, три блока масштабирования, цифровой блок умножения, цифроаналоговый преобразователь и цифроаналоговый блок умножения. 1 ил.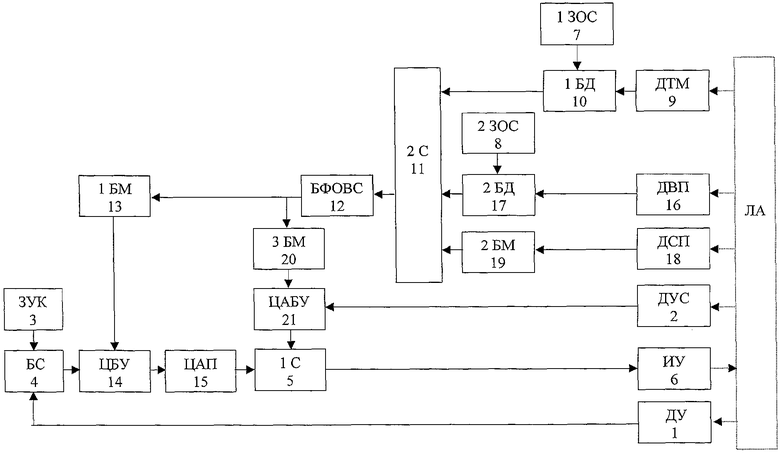
Бортовая цифроаналоговая адаптивная система управления движением летательного аппарата по крену, содержащая датчик угла, датчик угловой скорости, последовательно соединенные задатчик угла крена и блок сравнения, второй вход которого соединен с выходом датчика угла, и последовательно соединенные первый сумматор и исполнительное устройство, отличающаяся тем, что она содержит первый и второй задатчики опорного сигнала, последовательно соединенные датчик текущей массы, первый блок деления, второй вход которого подключен к выходу первого задатчика опорного сигнала, второй сумматор, блок формирования обратной величины сигнала, первый блок масштабирования, цифровой блок умножения, второй вход которого соединен с выходом блока сравнения, и цифроаналоговый преобразователь, выход которого соединен с первым входом первого сумматора, последовательно соединенные датчик высоты полета и второй блок деления, второй вход которого соединен с выходом второго задатчика опорного сигнала, а выход - со вторым входом первого сумматора, последовательно соединенные датчик скорости полета и второй блок масштабирования, выход которого соединен с третьим входом второго сумматора, последовательно соединенные третий блок масштабирования, вход которого соединен с выходом блока формирования обратной величины сигнала, и цифроаналоговый блок умножения, второй вход которого соединен с выходом датчика угловой скорости, а выход - со вторым входом первого сумматора.
| Михалев И.А | |||
| и др | |||
| Системы автоматического управления самолетом | |||
| - М.: Машиностроение, 1987, с.174 | |||
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПО КРЕНУ И ТАНГАЖУ | 2003 |
|
RU2251136C1 |
| Лебедев А.А., Чернобровкин Л.С | |||
| Динамика полета беспилотных летательных аппаратов | |||
| - М.: Машиностроение, 1973, с.486 | |||
| Боднер В.А | |||
| Системы управления летательными аппаратами | |||
| - М.: Машиностроение, 1973, с.118-122. | |||

