Изобретение относится к авиационной технике, а именно к способам подавления боковых колебаний самолетов на больших углах атаки, в летной практике получивших название " падение листом" или Wing Rock (WR), и может быть использовано в системах управления маневренных самолетов с дифференциальным стабилизатором.
Предлагаемый способ позволяет улучшить характеристики устойчивости и управляемости маневренного самолета, расширить маневренные возможности самолета с выходом на большие углы атаки, в том числе и при использовании на самолете двигателей с отклоняемым вектором тяги (ОВТ).
Известен адаптивный автопилот угла крена для управления и стабилизации самолета, включающий датчик угла крена, датчик угловой скорости крена, последовательно соединенный с корректирующей обратной связью, выход которой подключен к входу блока разности, сервопривод, имеющий выход для формирования сигнала отклонения элеронов, эталонную модель, дифференциатор, блоки суммирования, интегратор, из которых сформирован комбинированный контур настройки в широком диапазоне изменения параметров самолета. (Пат. РФ №2272747, 2004.06.10., кл. В64С 13/18).
Однако эффективность элеронов с ростом угла атаки значительно уменьшается, что снижает эффективность работы демпфера крена на больших углах атаки.
Известно устройство - демпфер рыскания самолета, содержащий датчики угловых скоростей крена и рыскания, дифференцирующий фильтр, суммирующий усилитель, привод руля направления (Пат.РФ№2194650, 13.10.99 г., авт. Кондратова А.Л., Курдюмова Ю.Н., кл. МПК В64С 13/00).
Недостатками устройства являются использование дифференциального фильтра в цепи сигнала угловой скорости рыскания, что сужает область устойчивости системы при наличии путевой неустойчивости самолета, характерной для режимов полета на больших углах атаки. Кроме того, эффективность рулей направления с ростом угла атаки значительно уменьшается, что делает малоэффективным подавление боковых колебаний на больших углах атаки с помощью демпфера рыскания.
Известны исследования, выполненные в ЦАГИ с применением математической модели динамики самолета для больших углов атаки, см. Сыроватский В.А, Хмелевский В.Л. «Исследование на пилотажном стенде устойчивости и управляемости маневренного самолета на закритических углах атаки», Труды конференции по проблемам полета на больших углах атаки. ЦАГИ, 26-27.11.87 г., и исследования, выполненные в ЛИИ на летающих динамически подобных моделях, см. Золотухин Р.Б. и др. «Летные исследования динамически подобных моделей ДМ 9-13 по определению характеристик устойчивости и управляемости самолета МиГ-29 на закритических углах атаки», Научно-технический отчет №88-44-II ЛИИ и ММЗ «Зенит» 1988 г., которые показали возможность существенного уменьшения амплитуды боковых колебаний самолета на больших углах атаки при использовании дифференциального стабилизатора и обратной связи по углу скольжения. Однако задача полного подавления колебаний тогда не была решена. Следует отметить, что эти исследования проводились в рамках реальной структуры системы управления полетом с ограниченными возможностями автоматики.
Известны расчетные исследования методов подавления режима WR с использованием линейной системы с обратными связями, которые приведены в работе Liebst B.S. and DeWitt B.R.. "Wing Rock Suppression in the F-15Aircraft",AIAA Paper 97-3719 (August, 1997). Для оценки эффективности системы подавления WR на самолете F-15 использовали расчетные критерии начала режима WR и алгоритм управления с использованием обратных связей по углу скольжения в каналах управления элеронами и рулями направления. Однако результаты математического моделирования показали возможность лишь небольшого увеличения угла атаки начала боковых колебаний - всего на 3,8° при использовании линейной системы подавления колебаний.
Известен способ обеспечения полной устойчивости бокового движения самолета на больших углах атаки при использовании в алгоритме управления дифференциальным стабилизатором изменяемого в зависимости от амплитуды боковых колебаний передаточного коэффициента обратной связи по углу скольжения, включающий измерение угла скольжения β, угла атаки α, угловой скорости рыскания ωу, угловой скорости по крену ωх самолета и управление дифференциальным отклонением стабилизатора в пределах |Δφстmax|=5°, см. Goman M.G. and Khramtsovsky A.V. "Application of continuation and bifurcation methods to the design of control systems" the Royal Society Philosophical Transactions: Mathematical, Physical and Engineering Sciences, London 356: 2277-2295 (August, 1998). Этот способ, наиболее близкий к предлагаемому, обеспечивает подавление боковых колебаний примерно за шесть периодов колебаний. В алгоритме управления дифференциальным отклонением стабилизатора не учитывается зависимость его эффективности по крену и рысканию от среднего угла отклонения стабилизатора, что существенно снижает эффективность данного способа подавления боковых колебаний самолета.
Технический результат, на достижение которого направлено изобретение, заключается в повышении устойчивости и управляемости маневренного самолета на больших углах атаки при любом угле отклонения стабилизатора.
В способе подавления боковых колебаний маневренного самолета на больших углах атаки, включающем измерение среднего угла отклонения дифференциального стабилизатора φст, угла скольжения β, угла атаки α, угловой скорости рыскания ωу, угловой скорости крена ωx самолета, формирование сигналов управления отклонениями рулей направления δрн, элеронами δэ и дифференциальным отклонением стабилизатора в пределах |Δφстmax|=5° для обеспечения боковой устойчивости самолета, подавление боковых колебаний маневренного самолета осуществляют практически за один период на углах атаки α>30° в полном диапазоне отклонений стабилизатора φст=-30°…+10°, для чего
настраивают управление дифференциальным отклонением стабилизатора на его преобладающую эффективность по крену или по рысканию путем выбора значений передаточных коэффициентов по углу скольжения, угловой скорости крена и рыскания в зависимости от среднего угла отклонения стабилизатора в соответствии с результатами испытаний модели самолета в аэродинамических трубах и формируют алгоритм управления дифференциальным отклонением стабилизатора с использованием построенных зависимостей передаточных коэффициентов обратных связей Кωх(φст), Кωy(φст) и Кβ(φст) от среднего угла отклонения стабилизатора в следующем виде:
Δφст=Kωx(φст)ωx+Kωy(φст)ωy+Kβ(φст)β,
где Δφст - дифференциального отклонения стабилизатора;
Кωх(φст), Кωy(φст) и Кβ(φст)- передаточные коэффициенты с аргументом, изменяющимся в полном диапазоне φст;
ωх -угловая скорость крена;
ωу - угловая скорость рыскания;
β - угол скольжения.
Кроме того, значения передаточных коэффициентов Кωx(φст), Кωх(φст), Кβ(φст), соответствующие заданным средним углам отклонения, выбирают по зависимостям, изменяющимся в полном диапазоне среднего угла отклонения дифференциального стабилизатора φст=-30°…+10°
Таким образом, использование алгоритма с переменной структурой (демпфер крена/демпфер рыскания) в зависимости от среднего угла отклонения стабилизатора и обратной связи по углу скольжения для управления дифференциальным отклонением стабилизатора позволяет подавить боковые колебания самолета на больших углах атаки, что обеспечивает расширение области возможных режимов полета и выполняемых маневров самолета, повышает надежность и безопасность полета на больших углах атаки.
На фиг.1 представлена структурная схема системы управления дифференциальным стабилизатором, реализующей предложенный способ подавления боковых колебаний самолета.
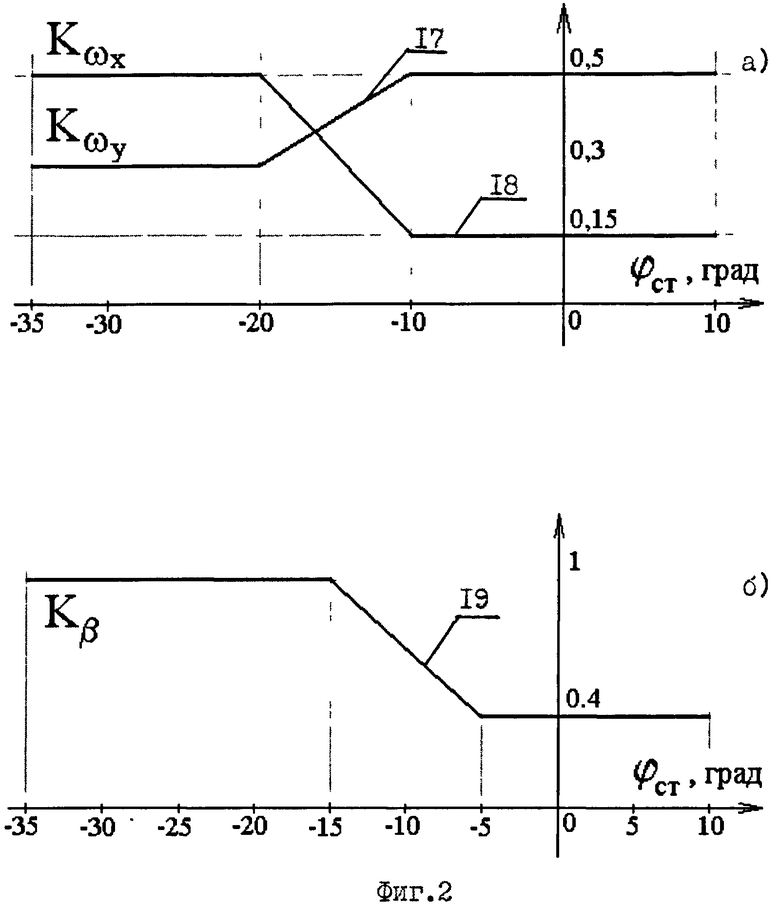
На фиг.2а, б показаны зависимости коэффициентов обратных связей Кωx(φст), Kωy(φст) и Кβ(φст) от среднего угла отклонения дифференциального стабилизатора.
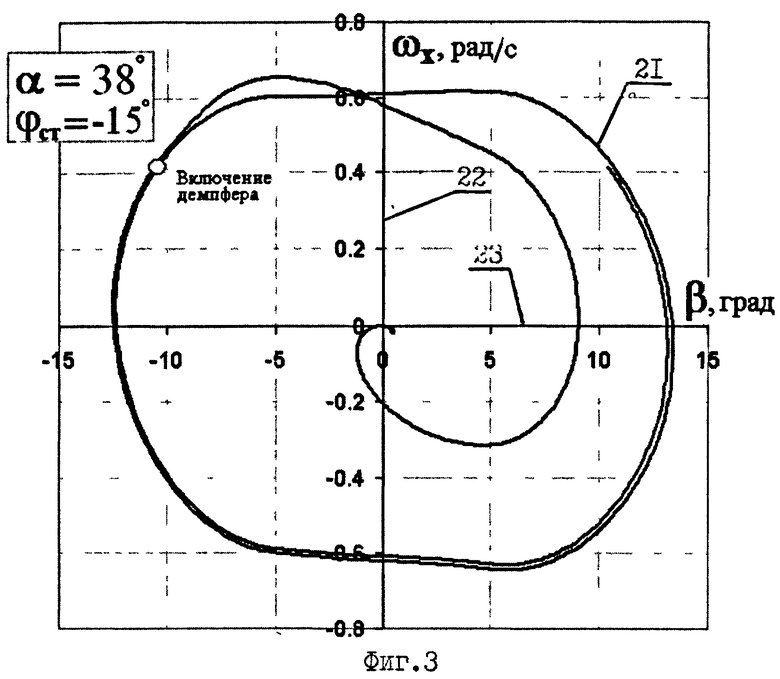
На фиг.3 показана эффективность применения алгоритма управления в виде фазового портрета затухания боковых колебаний самолета на угле атаки α=38° после включения системы подавления колебаний с настройкой алгоритма управления дифференциальным отклонением стабилизатора по среднему углу отклонения стабилизатора φст=-15°.
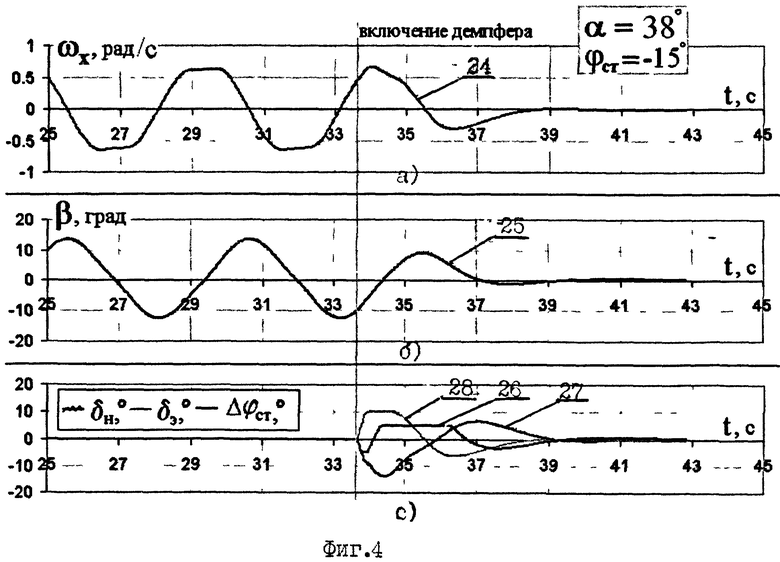
На фиг.4а, б, с показаны процессы затухания колебаний и отклонения органов управления по времени при включении системы подавления колебаний.
Структурная схема системы управления дифференциальным стабилизатором для подавления боковых колебаний содержит датчик угла атаки 1; задатчик допустимого угла атаки без использования системы подавления боковых колебаний 2; блок разности 3; блок вычисления среднего угла отклонения дифференциального стабилизатора 4; датчики угловых скоростей крена 5 и рыскании 6; датчик угла скольжения 7 самолета 8; три цепи с блоками обратной связи: по угловой скорости крена 9, по угловой скорости рыскания 10 и по углу скольжения 11, имеющие передаточные коэффициенты обратных связей Кωх(φст), Кωy(φст), Кβ(φст) с аргументом, изменяющимся в полном диапазоне отклонений стабилизатора φст=-30°…+10°; контур управления дифференциальным отклонением стабилизатора 12, включающий три цепи с блоками обратной связи 9, 10, 11, блок суммирования 13 и ограничитель угла дифференциального отклонения стабилизатора 14; управляемый ключ 15 и приводы 16 с блоками управления стабилизатором, состоящим из двух раздельных половин с возможностью синфазного и дифференциального поворота половин стабилизатора (не показаны).
Выходы датчиков угловой скорости крена 5, рыскания 6 и угла скольжения 7 соединены с первыми входами блоков обратных связей 9, 10, 11, а управляющий выход блока вычисления среднего угла отклонения дифференциального стабилизатора 4 соединен со вторыми входами блоков 9, 10, 11 и входами приводов 16 дифференциального стабилизатора. Выходы блоков 9, 10, 11 подключены к входам блока суммирования 13 контура управления 12 дифференциальным отклонением стабилизатора. Выход блока 13 подается через ограничитель 14 и ключ 15 на вход блока управления приводами дифференциального стабилизатора. Выходы датчика угла атаки 1 и задатчика 2 допустимого угла атаки соединены с входом блока разности 3, управляющий выход которого соединен с ключом 15, который при включении соединяет контур управления 12 дифференциальным отклонением стабилизатора с блоком управления приводами стабилизатора 16 (фиг.1).
Предложенный способ осуществляют следующим образом.
Сигналы текущих угловых скоростей крена, рыскания и угла скольжения с выходов датчиков 5, 6, 7 самолета 8 поступают на первые входы цепей обратных связей 9, 10, 11 соответственно, сигналы текущего среднего угла отклонения стабилизатора с управляющего выхода блока вычисления среднего угла отклонения дифференциального стабилизатора 4 самолета 8 поступают на вторые входы блоков обратных связей 9, 10, 11. На выходах цепей обратных связей формируются сигналы Кωx(φст)ωх, Кωy(φст)ωу, Кβ(φст)β с использованием построенных зависимостей передаточных коэффициентов от среднего угла отклонения стабилизатора в соответствии с результатами испытаний моделей самолета в аэродинамических трубах. Сигналы обратных связей поступают в блок суммирования 13, где вычисляется сигнал дифференциального отклонения стабилизатора Δφст с ограничением в блоке 14 угла поворота половин стабилизатора в пределах |Δφстmax|=5°:
Δφст=Kωx(φст)ωx+Kωy(φст)ωy+Kβ(φст)β.
Ключ 15 соединен с управляющим выходом блока разности 3, в котором определяют разность между допустимым углом атаки без использования системы подавления боковых колебаний и текущим углом атаки. Если измеренный угол атаки больше допустимого значения, то ключ 15 подключает контур управления 12 дифференциальным отклонением стабилизатора к цепи управления 16 стабилизатора. Сигнал дифференциального отклонения стабилизатора Δφст через ключ 15 поступает в цепь управления стабилизатором на привод 16.
При углах атаки α>30° система подавления боковых колебаний включается в управление дифференциальным стабилизатором (фиг.1) и обеспечивает подавление боковых колебаний за счет управления дифференциальным отклонением стабилизатора в пределах |Δφстmax|=5°.
Коэффициенты обратных связей Кωx(φст), Kωy(φст) и Кβ(φст) предварительно вычисляют с использованием методов численного анализа нелинейных систем с учетом изменения эффективности дифференциального отклонения стабилизатора по крену и рысканию в зависимости от среднего угла отклонения стабилизатора.
Для подавления боковых колебаний используют дифференциальный стабилизатор, сохраняющий достаточно высокую эффективность на больших углах атаки, в то время как эффективность элеронов и рулей направления с ростом угла атаки значительно уменьшается. Однако существенной особенностью дифференциального стабилизатора является зависимость его эффективности по крену и рысканию от среднего угла отклонения стабилизатора. На больших углах атаки при околонулевых и положительных значениях среднего угла отклонения стабилизатора преобладает эффективность дифференциального стабилизатора по рысканию и оптимальным является закон управления с применением сигналов обратной связи по ωу и β. При больших отрицательных значениях φст преобладающей становится эффективность дифференциального стабилизатора по крену и оптимальным является закон управления с применением сигналов обратной связи по ωх 22 и β 23 (фиг.3). Эта особенность динамических характеристик дифференциального стабилизатора подтверждается результатами летных испытаний.
Зависимость эффективности дифференциального стабилизатора от его среднего угла отклонения имеет существенное значение и для системы управления самолета с ОВТ, поскольку при использовании ОВТ балансировочные углы отклонения стабилизатора на больших углах атаки могут изменяться в широких пределах - от больших отрицательных до положительных значений.
Подавление боковых колебаний самолета на больших углах атаки осуществляют путем перенастройки алгоритма управления дифференциальным отклонением стабилизатора в зависимости от среднего угла отклонения стабилизатора. При близких к нулевым и положительных значениях φст дифференциальный стабилизатор работает как орган путевого управления - для демпфирования движения рыскания и повышения путевой устойчивости самолета, а при средних и больших отрицательных значениях φст - как орган поперечного управления - для демпфирования движения крена и повышения поперечной устойчивости. Законы управления дифференциальным стабилизатором, оптимальные при максимальной эффективности по крену и по рысканию, имеют одинаковую структуру, но разные значения передаточных чисел.
Параметрические исследования показали, что эффективность каждого закона управления сохраняется в достаточно широком диапазоне значений φст. Для перехода от одного закона управления к другому достаточно использовать линейное изменение передаточных коэффициентов Kωx(φст) 17, Кωy(φст) 18 и Кβ(φст) 19 в диапазоне средних значений угла отклонения стабилизатора φст=-20°…-5° (фиг.2,а и 2,б).
Алгоритм управления с настройкой на преобладающую эффективность дифференциального стабилизатора сохраняет свою эффективность во всем диапазоне отклонений стабилизатора. При значениях коэффициентов Кωx(φст), Кωy(φст) и Кβ(φст), соответствующих текущему углу отклонения стабилизатора, алгоритм управления обеспечивает эффективное подавление боковых колебаний самолета, практически за один период колебаний.
Эффективность заявляемого способа управления показана на фиг.3, где в качестве примера приведен фазовый портрет 21 затухания боковых колебаний самолета в координатах ωх 22, β 23 при угле атаки α=38° после включения системы подавления колебаний с настройкой алгоритма управления на средний угол отклонения стабилизатора φст=-15°. Наряду с дифференциальным стабилизатором система подавления колебаний использует элероны и рули направления. На фиг.4 показано изменение параметров движения самолета и отклонения органов управления - руля направления 27, элеронов 28 и стабилизатора 26 - по времени, после включения системы подавления колебаний. Видно, что боковые колебания по угловой скорости ωх 24 и углу скольжения β 25 подавляются практически полностью за один период колебаний.
Таким образом, достигается существенный положительный эффект при функционировании системы подавления боковых колебаний, который находит подтверждение при проведении летных испытаний и исследований на устойчивость и управляемость маневренных самолетов на больших углах атаки.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В БОКОВОМ ДВИЖЕНИИ | 2017 |
|
RU2671063C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА С АДАПТИВНОЙ ПЕРЕКРЕСТНОЙ СВЯЗЬЮ | 2019 |
|
RU2736400C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КРЕНА | 2020 |
|
RU2753776C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО МОДАЛЬНОГО УПРАВЛЕНИЯ БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2618652C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ДВУХКИЛЕВОГО ПИЛОТИРУЕМОГО ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2020 |
|
RU2765837C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДОВАНИЯ РЕСУРСА И СПЕКТРА НАГРУЗОК ОСНОВНЫХ ЭЛЕМЕНТОВ ПЛАНЕРА МАНЕВРЕННЫХ САМОЛЕТОВ | 2011 |
|
RU2473959C1 |
Изобретение относится к способам подавления боковых колебаний с большими амплитудами и может быть использовано в системах управления маневренных самолетов с дифференциальным стабилизатором. Способ подавления боковых колебаний маневренного самолета на больших углах атаки включает измерение среднего угла отклонения дифференциального стабилизатора, угла скольжения, угла атаки, угловой скорости рыскания и угловой скорости крена самолета, формирование сигналов управления отклонениями рулей направления, элеронов и дифференциальным отклонением стабилизатора. Алгоритм управления дифференциальным отклонением стабилизатора формируют путем выбора значений передаточных коэффициентов по зависимостям изменения Кωх(φст), Кωy(φст) и Кβ(φст) от среднего угла отклонения стабилизатора в диапазоне φст=-30°…+10°, настраивают на преобладающую эффективность стабилизатора по его среднему углу отклонения в следующем виде: Δφст=Kωx(φст)ωx+Kωy(φст)ωy+Kβ(φст)β, где Δφст - дифференциальное отклонение стабилизатора; Кωх(φст),Кωу(φст) и Кβ(φст) - передаточные коэффициенты с аргументом, изменяющимся в полном диапазоне φст; ωх -угловая скорость крена; ωу - угловая скорость рыскания; β - угол скольжения. Достигается повышение устойчивости и управляемости маневренного самолета на больших углах атаки α>30°, при любом среднем угле отклонения стабилизатора. 1 з.п. ф-лы, 7 ил.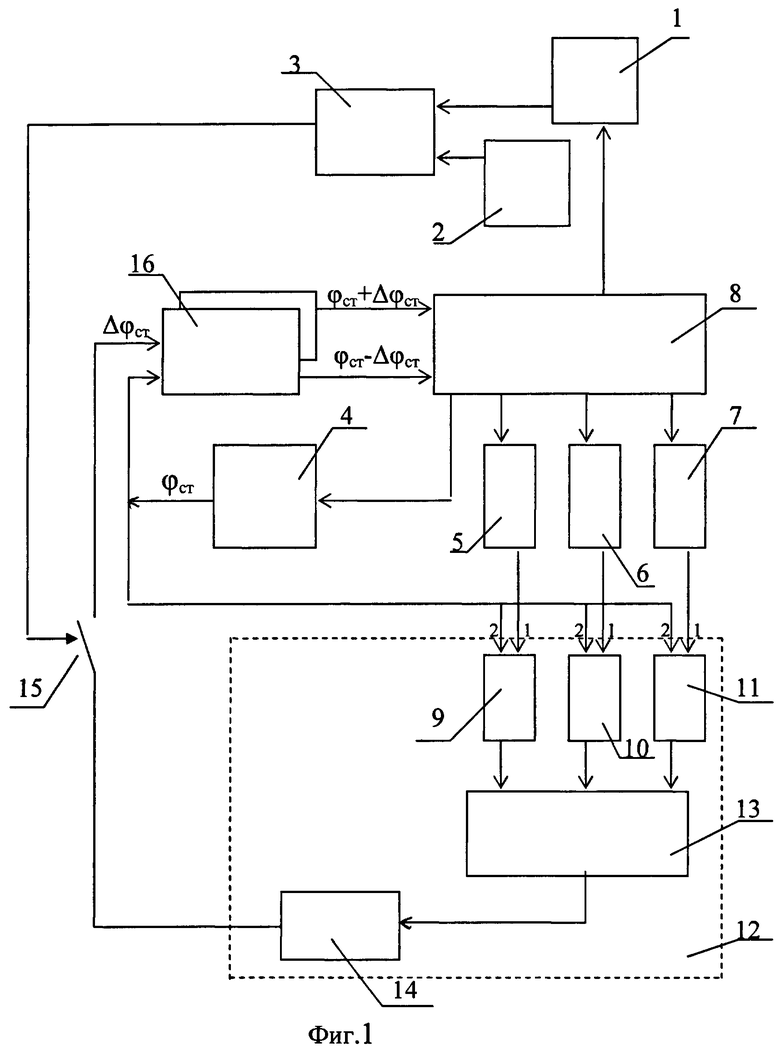
1. Способ подавления боковых колебаний маневренного самолета на больших углах атаки, включающий измерение среднего угла отклонения дифференциального стабилизатора, угла скольжения, угла атаки, угловой скорости рыскания и угловой скорости крена самолета, формирование сигналов управления рулями направления, элеронами и дифференциальным отклонением стабилизатора в пределах |Δφст max|=5° для обеспечения боковой устойчивости самолета, отличающийся тем, что боковые колебания маневренного самолета на больших углах атаки α>30° и в полном диапазоне отклонений стабилизатора φст подавляются практически за один период колебаний, для чего настраивают управление дифференциальным отклонением стабилизатора на его преобладающую эффективность по крену или по рысканию, путем выбора значений передаточных коэффициентов по углу скольжения, угловой скорости крена и рыскания в зависимости от среднего угла отклонения стабилизатора в соответствии с результатами испытаний модели самолета в аэродинамических трубах, строят зависимости передаточных коэффициентов в цепях обратных связей Кωх, Кωy и Кβ от среднего угла отклонения стабилизатора и формируют алгоритм управления дифференциальным отклонением стабилизатора с использованием построенных зависимостей передаточных коэффициентов обратных связей Кωх(φст), Кωy(φст) и Кβ(φст) в следующем виде:
Δφст=Kωx(φст)ωx+Kωy(φст)ωy+Kβ(φст)β,
где Δφст - дифференциальное отклонение стабилизатора;
Кωх(φст),Кωу(φст) и Кβ(φст) - передаточные коэффициенты с аргументом, изменяющимся в полном диапазоне φст;
ωх -угловая скорость крена;
ωу - угловая скорость рыскания;
β - угол скольжения.
2. Способ подавления боковых колебаний маневренного самолета на больших углах атаки по п.1, отличающийся тем, что выбирают значения передаточных коэффициентов обратных связей Кωх(φст), Кω(φст), Кβ(φст), соответствующих текущему среднему углу отклонения стабилизатора, по зависимостям, приведенным в таблице:
| ДЕМПФЕР РЫСКАНИЯ САМОЛЕТА | 1999 |
|
RU2194650C2 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО ВЫВЕДЕНИЯ САМОЛЕТА ИЗ РЕЖИМОВ СВАЛИВАНИЯ И ШТОПОРА В ШТАТНЫЙ РЕЖИМ ПОЛЕТА | 2005 |
|
RU2280591C1 |
| СПОСОБ И УСТРОЙСТВО ОГРАНИЧЕНИЯ УГЛА АТАКИ И ПЕРЕГРУЗКИ САМОЛЕТА | 2002 |
|
RU2248304C2 |
| DE 10236815 А1, 26.02.2004 | |||
| WO 2009013322 А1, 29.01.2009 | |||
| US 2004098176 А1, 20.05.2004. | |||

