Изобретение относится к области проектирования гидроакустических лагов и направлено на повышение точности их работы в реальных условиях эксплуатации.
К настоящему времени известно несколько типов гидроакустических лагов, использующих эффект Допплера: разработанные в США лаги JN-400 [1] и лаги серии MRQ [2], а также отечественные лаги ЛА-1.
Основным тактико-техническим параметром таких лагов является точность измерения скорости корабля (подводной лодки) относительно грунта. Поэтому усилия разработчиков гидроакустических лагов направлены на поиски схемных и функциональных решений, обеспечивающих максимальную точность измерения скорости в реальных условиях плавания корабля, т.е. в широком диапазоне скоростей, глубин под килем, углов качки и т.д.
В частности, в лаге, являющемся прототипом для предлагаемого изобретения, с целью уменьшения флуктуационной составляющей ошибки измерения скорости автоматически поддерживается постоянной скважность излучаемых импульсов.
Однако проведенные в последнее время теоретические и экспериментальные исследования структуры ошибок при измерении скорости гидроакустическим лагом показали, что помимо флуктуационных ошибок существенный вклад в суммарную погрешность измерения скорости вносят систематические погрешности. К ошибкам такого рода и относится ошибка за счет смещения допплеровского спектра эхо-сигнала. Учет этой ошибки во всех известных авторам гидроакустических лагах не производится.
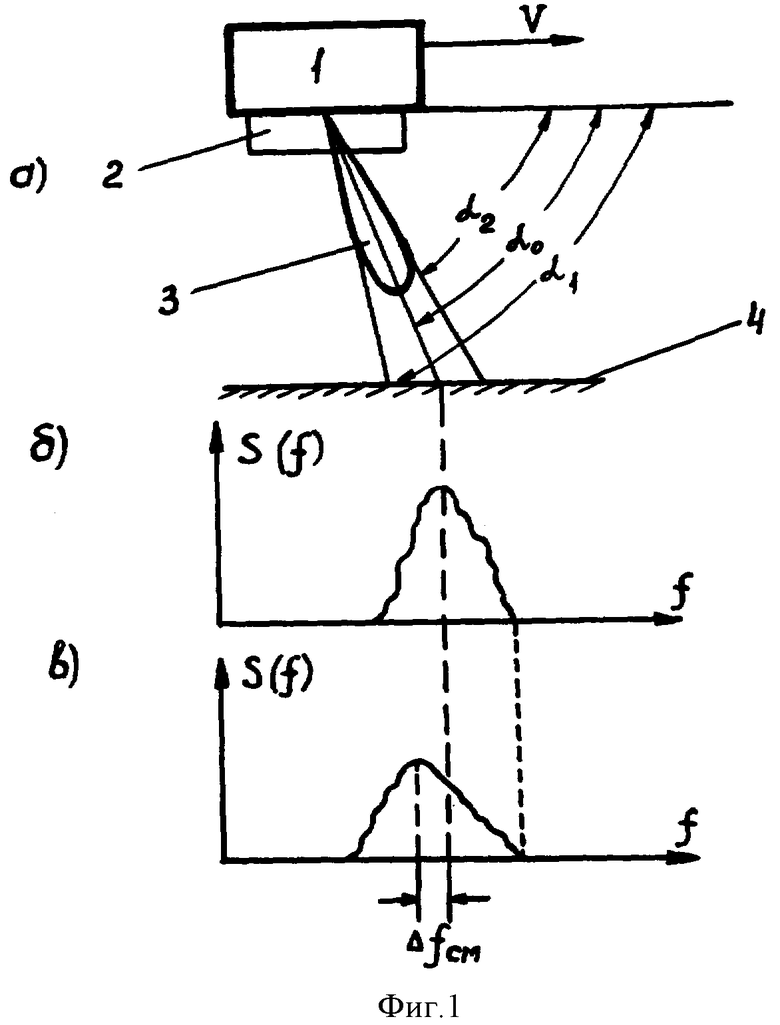
Целью настоящего изобретения является повышение точности измерения скорости гидроакустическими лагами путем компенсации указанной систематической погрешности, обусловленной смещением допплеровского спектра эхо-сигнала. Согласно изобретению поставленная задача достигается дополнительным введением в состав аппаратуры лага блока выработки поправки и сумматора, обеспечивающих автоматическое введение поправки в измеренное значение скорости. Физическая природа ошибки измерения скорости за счет смещения допплеровского спектра эхо-сигнала поясняется фиг.1а чертежа.
Здесь 1 - движущийся корабль.
2 - приемо-излучающая антенна лага.
3 - диаграмма направленности антенны.
4 - морское дно.
α0, α1, α2 - углы наклона акустических лучей, соответствующих оси и краям диаграммы направленности.
Из фиг.1a с учетом известной формулы для определения допплеровского сдвига частоты

где fпр - частота принятых ультразвуковых колебаний;
fизл - частота излученных ультразвуковых колебаний;
Δfд - допплеровский сдвиг частоты;
V - скорость корабля;
С - скорость звука в воде;
α0 - угол между направлениями движения и излучения.
Следует, что каждому из углов α0, α1, α2 (фиг.1а) соответствует свой определенный допплеровский сдвиг частоты, что приводит в результате к появлению допплеровского спектра частот эхо-сигнала. Форма допплеровского спектра определяется формой диаграммы направленности. При измерении скорости в приемном тракте лага выделяют допплеровскую частоту, соответствующую максимуму спектральной плотности принятого сигнала. При этом предполагают, что частота, соответствующая максимуму спектральной плотности, связана с величиной измеряемой скорости корабля соотношением (1). Спектр допплеровских частот, соответствующий такому предположению, показан на фиг.1б.
Однако уже из рассмотрения фиг.1а видно, что длина трасс сигнала для направлений α0,α1, α2 различна. В связи с наличием затухания ультразвука в воде указанное обстоятельство приведет к тому, что закон распределения спектральной плотности эхо-сигнала будет отличаться от закона, определяемого диаграммой направленности антенны лага, так как колебания, приходящие с направлений, близких к α2, затухают больше, то максимум спектральной плотности S(f) сместится в сторону меньших частот на величину Δfсм. Положение реального "смещенного" спектра допплеровских частот эхо-сигнала показано на фиг.1в. Измерение центральной частоты этого спектра и пересчет ее в значения скорости корабля по формуле (1) приведет к появлению систематической погрешности. Было показано, что с достаточным для практики приближением вносимая относительная погрешность измерения скорости составляет
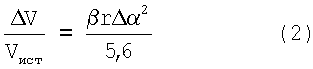
где β - затухание ультразвука на рабочей частоте лага, неп/м;
r - расстояние до дна вдоль луча, м;
Δα - раствор диаграммы направленности антенны лага, рад;
Vист - истинная скорость движения корабля;
ΔV - абсолютная величина вносимой ошибки.
При больших глубинах под килем величина  может достигать 80-90% от общей погрешности измерения скорости. Поскольку для конкретного типа лага величины β и Δα с большей степенью точности можно считать постоянными, то выражение (2) может быть приведено к виду
может достигать 80-90% от общей погрешности измерения скорости. Поскольку для конкретного типа лага величины β и Δα с большей степенью точности можно считать постоянными, то выражение (2) может быть приведено к виду

где К - константа.
Таким образом, для компенсации ошибки, обусловленной смещением допплеровского спектра эхо-сигнала, необходимо для каждого значения скорости движения корабля выработать поправку, пропорциональную наклонной дальности до грунта, и скорректировать измеренные значения скорости по формуле

где Vист - истинное значение скорости
Vизм - измеренное значение скорости
ΔV - значение поправки согласно (3).
В лаге-прототипе необходимая для выработки поправки информация о дальности до грунта вдоль луча имеется на выходе формирователя импульсов переменной длительности. Как длительность выходных импульсов, так и частота их следования пропорциональны текущему значению наклонной дальности до грунта. С учетом вышесказанного блок-схема предлагаемого гидроакустического лага с компенсацией ошибки на смещение допплеровского спектра эхо-сигнала имеет вид, как на фиг.2.
Передающий тракт 1, включающий в себя формирователь импульсов переменной длительности 2, и приемный тракт 3 обеспечивают излучение ультразвуковых колебаний, прием эхо-сигналов и выделение допплеровского смещения частоты. Фазовый детектор 4, генератор переменной частоты 5 и делитель частоты 6 совместно с формирователем 2 обеспечивают автоматическую регулировку длительности излучаемых импульсов в зависимости от глубины под килем корабля. Дополнительно введенные блок выработки поправки 7, состоящий из перемножителя 8 и элемента памяти 9, и сумматор 10 обеспечивают выработку поправки ΔV=KrVизм и корректировку измеренных значений скорости. При этом соответствующие входы перемножителя подключены:
а) к выходу элемента памяти 9, откуда поступает величина константы К;
б) к выходу формирователя импульсов переменной длительности 2, откуда поступает информация о текущем значении дальности r до грунта вдоль луча;
в) к выходу приемного тракта 3, откуда поступает информация о текущем значении допплеровской частоты, пропорциональной измеренной скорости корабля.
Выход перемножителя 8 подключен к одному из входов сумматора 10, на второй вход которого с выхода приемного тракта 3 поступает информация о текущем значении измеренной скорости. Выход сумматора подключен ко входу измерительной схемы 11.
Предлагаемая схема функционирует следующим образом. При работе лага по прямому назначению на соответствующие входы перемножителя 8 с выхода приемного тракта 3, выхода формирователя импульсов переменной длительности 2 и элемента памяти 9 непрерывно поступает информация о текущих значениях скорости корабля Vизм, наклонной дальности до грунта r и величине константы К, входящих в формулу (3). Значение константы вводится в элемент памяти 10 заранее, величина ее определяется конструктивными данными лага, районом плавания и т.д. Перемножитель 8 осуществляет необходимые электрические и масштабные преобразования и затем перемножение указанных величин. В результате на выходе перемножителя имеется величина необходимой поправки ΔV. Выработанная поправка поступает на сумматор 10, где складывается с измеренным значением скорости Vизм. Таким образом, на вход измерительной схемы 11 поступает величина Vист=Vизм+ΔV, что обеспечивает компенсацию ошибки за счет смещения допплеровского спектра эхо-сигнала в среде. Следует отметить, что так как величина самой поправки невелика ( ), то не требуется знания с большой точностью величин r и V, входящих в выражение (3). Поэтому точность данных о наклонной дальности до грунта (
), то не требуется знания с большой точностью величин r и V, входящих в выражение (3). Поэтому точность данных о наклонной дальности до грунта ( ), поступающих с выхода формирователя 2, является вполне достаточной. Точно также не исказит результата и использование при вычислении поправки величины Vизм вместо Vист.
), поступающих с выхода формирователя 2, является вполне достаточной. Точно также не исказит результата и использование при вычислении поправки величины Vизм вместо Vист.
Положительный эффект
Компенсация ошибки, обусловленной смещением допплеровского спектра эхо-сигнала, позволяет повысить точность работы гидроакустического лага типа ЛА-1 в 1,5-2,0 раза, что приведет к повышению точности счисления пути подводных лодок и эффективности использования ракетного оружия.
Литература
1. Проспект "General Applied Science Laboratories" Doppler Navigator Janus JN Series
2. Shipbilding & shipping record №4 v.112 26.07.1968
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1972 |
|
SU1840737A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ КОРАБЛЯ ОТНОСИТЕЛЬНО ДНА МОРЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1977 |
|
SU1840287A1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ КОРАБЛЯ ОТНОСИТЕЛЬНО ГРУНТА | 1969 |
|
SU1840754A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ СИГНАЛА | 2012 |
|
RU2498343C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1974 |
|
SU1840684A1 |
| ГЕНЕРАТОРНЫЙ ТРАКТ ПАРАМЕТРИЧЕСКОГО ГИДРОЛОКАТОРА | 2014 |
|
RU2582898C2 |
| ГИДРОАКУСТИЧЕСКИЙ ДОППЛЕРОВСКИЙ ЛАГ | 1974 |
|
SU1840682A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ТЕЧЕНИЯ | 1969 |
|
SU1840690A1 |
Гидроакустический лаг содержит передающий трак с формирователем импульсов переменной длительности, выходы которого подключены к управляющим входам фазового дискриминатора, к которому также подключен выход приемного тракта. Выход фазового дискриминатора соединен с генератором переменной частоты, а выход последнего соединен со входом формирователя импульсов через делитель частоты, сумматор, включенный между выходом приемного тракта и измерительной схемой лага. В схему лага включен блок выработки поправки, имеющей умножитель и элемент памяти. Управляющие входы умножителя соединены с выходами формирователя импульсов, приемного тракта и элемента памяти. Выход умножителя подключен к одному из входов сумматора. Технический результат - повышение точности измерения скорости путем компенсации систематической погрешности, обусловленной смещением допплеровского спектра эхо-сигнала. 2 ил.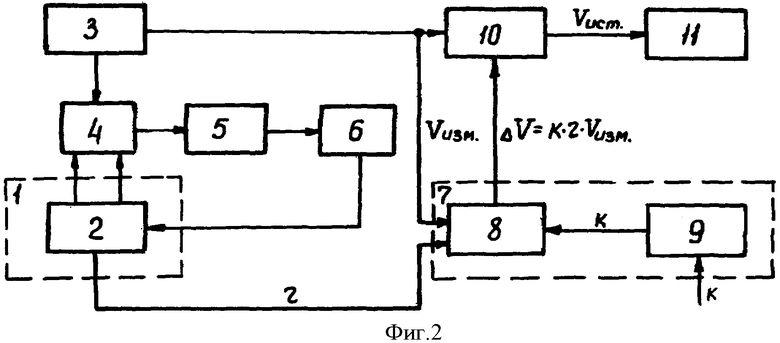
Гидроакустический лаг, содержащий передающий тракт с формирователем импульсов переменной длительности, выходы которого подключены к управляющим входам фазового дискриминатора, к которому также подключен выход приемного тракта, выход фазового дискриминатора соединен с генератором переменной частоты, а выход последнего соединен со входом формирователя импульсов через делитель частоты, сумматор, включенный между выходом приемного тракта и измерительной схемой лага, отличающийся тем, что, с целью повышения точности измерения скорости путем компенсации систематической погрешности, обусловленной смещением допплеровского спектра эхо-сигнала, в схему лага включен блок выработки поправки, имеющий умножитель и элемент памяти, при этом управляющие входы умножителя соединены с выходами формирователя импульсов, приемного тракта и элемента памяти, а выход этого умножителя подключен к одному из входов сумматора.

