Изобретение относится к области проектирования гидроакустических допплеровских лагов, предназначенных для измерения скорости корабля относительно морского дна, и направлено на повышение точности измерения скорости.
К настоящему времени известно много разновидностей гидроакустических лагов как в нашей стране, так и за рубежом, например [1-2].
Основной тактико-технической характеристикой гидроакустических лагов является точность измерения скорости корабля относительно морского дна. Результирующая погрешность измерения скорости гидроакустическим лагом нормируется большим числом независимых факторов. Все погрешности измерения скорости могут быть условно разбиты на следующие группы:
- методические погрешности;
- погрешности, обусловленные физической средой, в которой распространяется сигнал;
- погрешности, вызванные условиями работы лага на корабле-носителе.
Заметим, что наибольшие трудности возникают при компенсации погрешностей, обусловленных физической средой распространения сигнала (вода, грунт), так как характеристики этой среды на данный момент времени и в конкретном районе Мирового океана известны лишь с большой степенью неопределенности.
С другой стороны, ошибки измерения скорости в гидроакустических лагах могут быть разделены на флюктуационные и систематические. Систематические погрешности вносят существенный вклад в результирующую погрешность измерения скорости, что и определяет повышенный интерес к ним со стороны разработчиков гидроакустических лагов.
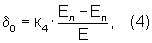
Общепринятым и эффективным способом выявления систематических погрешностей является калибровка системы по отношению к эталону, для отечественных гидроакустических лагов такая калибровка проводится на специальной мерной линии. Среди систематических погрешностей одной из наиболее существенных является погрешность, обусловленная деформацией (смещением) допплеровского спектра эхо-сигнала при его распространении до дна и обратно по сравнению с расчетным положением спектра. Физическая сущность этой ошибки может быть пояснена с помощью фиг.1.
Здесь: V - скорость движения корабля-носителя лага,
XH - характеристика направленности антенны лага,
θ0 - угол падения акустических лучей на дно.
В механизме формирования ошибки существенны следующие моменты:
- характеристика направленности антенны лага имеет конечный раствор, в результате чего энергия эхо-сигнала оказывается распределенной в пределах некоторого (допплеровского) спектра, несмотря на то, что излученный сигнал был тональным. Закон изменения интенсивности эхо-сигналов, принятых с какого-либо углового направления, определяется формой характеристики направленности антенны. При этом информация об измеряемой скорости содержится в положении максимума спектра на оси частот;
- длины траекторий для различных, например крайних, лучей в пределах характеристики направленности различны. Наличие пространственного затухания ультразвуковых колебаний в морской воде приводит к дополнительным различиям в уровнях сигналов, принятых с различных направлений. При этом сигналы, падающие на дно под большими углами падения θ, испытывают большее затухание;
- чем больше угол падения θ, тем больший допплеровский сдвиг частоты приобретает сигнал. В то же время известно, что коэффициент пространственного затухания ультразвуковой энергии с повышением частоты сигнала растет, например по закону
β∂Б/км=0,036f3/2 кГц
Таким образом, сигналы, падающие на дно под большими углами θ, будут еще более ослаблены.
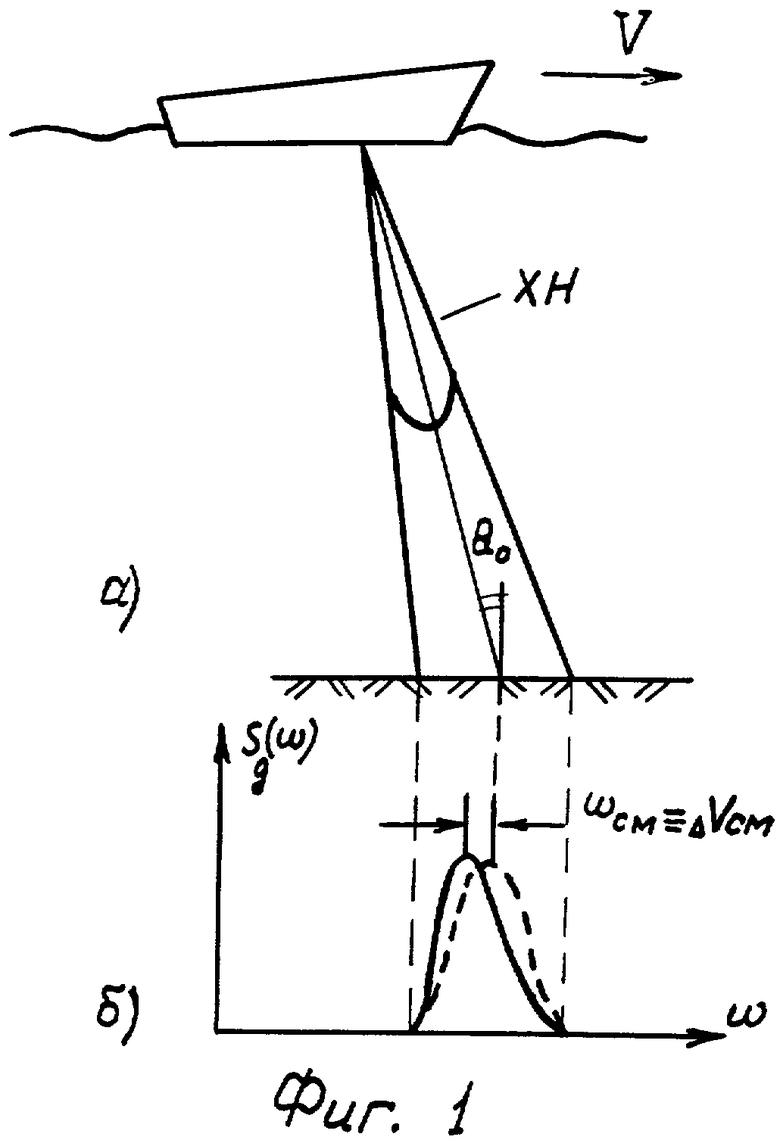
Различия в уровнях сигналов высокочастотной и низкочастотной частей спектра будет усугубляться также наличием угловой зависимости коэффициента обратного рассеяния от дна М(θ).
Примерный вид этой зависимости приведен на фиг.2
Нетрудно заметить, что все перечисленные факторы воздействуют на допплеровский спектр в одном направлении, в результате чего высокочастотные составляющие в спектре реально принятого эхо-сигнала подавляются, а максимум спектра смещается в сторону низких частот. Так как аппаратура лага зафиксирует положение максимума реального смещенного спектра (сплошная кривая на фиг.1б), а при расчете масштабного коэффициента лага принималось во внимание положение максимума расчетного спектра (пунктирная кривая на фиг.1б), то возникает погрешность измерения скорости ΔVсм, обусловленная смещением спектра
где Δωсм - различие частот, соответствующих максимумам расчетного и фактического спектров (фиг.1б).
Строгое выражение для погрешности измерения скорости за счет смещения спектра имеет вид:

V - скорость корабля
где к1, к2, к3 - константы;
β - коэффициент пространственного затухания ультразвуковых колебаний, неп/км;
R - наклонная дальность от антенны лага до дна, км;
Δα - раствор характеристики направленности антенны лага на уровне половинной мощности, рад;
b - параметр, характеризующий зависимость коэффициента обратного донного рассеяния от угла падения θ.
Заметим, что три члена выражения (2) характеризуют составляющие погрешности ΔVсм, определяемые соответственно пространственным затуханием ультразвука, угловой зависимостью коэффициента обратного рассеяния и законом сферического расхождения звуковой волны.
Заметим, что погрешность ΔVсм проявляется отчетливо лишь при больших значениях R, т.е. при глубинах под килем корабля Н=5-6 км. В то же время глубины в полигонах, где производится калибровка лагов, не превышают Н=0,5 км. В результате проходится ограничиваться лишь расчетом поправки без экспериментальной проверки.
Выработка и учет поправки на смещение доплеровского спектра эхосигнала производится в отечественном гидроакустическом лаге "Самшит", принятом в данном случая за прототип. В указанном лаге имеются блок выработки поправки, сумматор и элемент памяти. Блок выработки поправки осуществляет выработку поправки по закону, определяемому первым членом выражения (2). В целях упрощения устройства влиянием второго и третьего членов в выражении (2) пренебрегали. Основанием этого являлась их относительная малость по сравнению с первым членом. При помощи сумматора в лаге "Самшит" осуществляется коррекция измеренных значений скорости по правилу
Это способствует повышению точности измерения скорости. Однако указанный способ не лишен недостатков.
Основным недостатком лага-прототипа является то обстоятельство, что входящая в (2) величина коэффициента пространственного затухания сигнала β определяется априорно и хранится в элементе памяти. Так как величина β является функцией многих параметров (географические координаты места измерения скорости, частота излучаемого сигнала, глубина моря, время года и др.), то ее априорное определение связано со значительными погрешностями, а также неудобствами при эксплуатации.
Вторым недостатком лага-прототипа является то обстоятельство, что для вычисления погрешности ΔVсм необходима информация с глубине под килем.
Третьим недостатком лага-прототипа является игнорирование при реализации лага второго и третьего членов в формуле (2).
Целью настоящего изобретения является повышение точности измерения скорости гидроакустическим лагом путем выработки поправки на смещение допплеровского спектра эхосигнала с повышенной точностью н исключительно на основе информации, содержащейся в параметрах принятого эхо-сигнала и, следовательно, справедливой для любых конкретных условий работы лага.
В основе предлагаемых способа и устройства для измерения скорости лежит установленная взаимосвязь между величиной углового смещения максимума допплеровского спектра эхо-сигнала δ0 и распределением энергии сигнала между левой и правой частями доплеровского спектра принятого сигнала (относительно его максимума). Эта взаимосвязь характеризуется следующей зависимостью
где δ0 - величина углового смещения максимума допплеровского спектра эхо-сигнала относительно его расчетного положения;
Ел, Еп - энергия, содержащаяся соответственно в левой и правой частях спектра относительно его максимума;
Е - полная энергия эхо-сигнала;
к4 - константа, определяемая параметрами аппаратуры.
Величина абсолютной погрешности измерения скорости ΔVсм, обусловленная смещением спектра, может быть вычислена как
ΔVсм=к5δ0V, (5)
где к5 - константа, зависящая также лишь от параметров аппаратуры;
V - скорость корабля.
После осреднения величины ΔVсм по ряду эхо-сигналов с целью сглаживания ее случайных колебаний истинное значение скорости Vист может быть найдено по формуле
Vист=Vизм+Δ см, (6)
см, (6)
где Vизм - измеренное значение скорости,
Δсм - значение погрешности ΔVсм, осредненное по ряду эхо-сигналов.
Если учесть, что во многих известных способах измерения скорости, основанных на эффекте допплера, определение частоты допплеровского спектра, соответствующей его максимуму, уже производится, то отличительными признаками предлагаемого способа являются следующие последовательно выполняемые операции:
- определение долей энергии эхо-сигнала, содержащихся в левой и правой частях допплеровского спектра относительно известной (найденной) средней частоты;
- определение разности этих энергий;
- нормировка полученного значения разности энергий по отношению к полной энергии сигнала;
- осреднение нормированного значения разности энергий по множеству эхо-сигналов;
- вычисление обусловленной смещением спектра погрешности измерения скорости, пропорциональной нормированному осредненному значению разностей энергий левой и правой половин доплеровского спектра эхо-сигнала;
- корректировка измеренных значений скорости на величину вычисленной погрешности измерения скорости.
Аналогично в состав предлагаемого устройства для измерения скорости гидроакустического лага должны быть введены дополнительно следующие функциональные узлы:
- блоки вычисления энергии сигнала, содержащейся в левой и правой частях его спектра (относительно максимума спектра);
- блок вычисления разности энергий левой и правой частей спектра;
- блок вычисления суммарной энергии эхо-сигнала;
- блок нормировки разности энергий левой и правой частей допплеровского спектра по отношению к суммарной энергии;
- интегратор;
- перемножитель;
- сумматор.
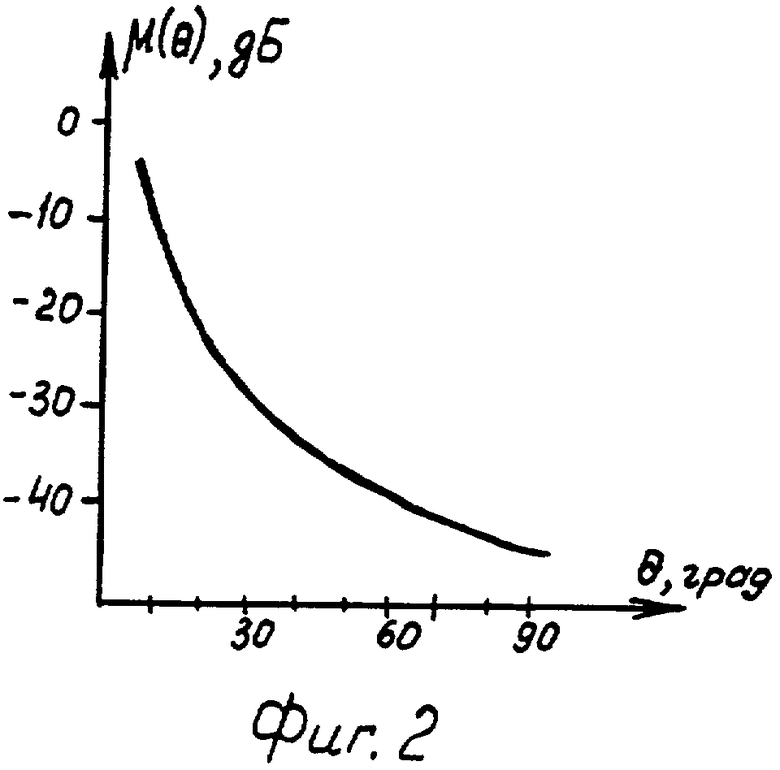
Сущность изобретения поясняется фиг.3, на которой изображена блок-схема предлагаемого лага.
Предлагаемый лаг содержит излучающий тракт 1, приемный тракт 2, блок автоматического слежения за средней частотой доплеровского спектра сигнала 3, блок пересчета значений допплеровской частоты в значения скорости корабля 4, индикатор скорости 5, блок вычисления разности энергий левой и правой частей доплеровского спектра эхосигнала 6, блок вычисления суммарной энергии эхо-сигнала 7, блок нормировки энергии 8, интегратор 9, перемножитель 10 и сумматор 11.
Элементы схемы 6-11, обведенные пунктирной линией, включены в лаг заново.
Рассмотрим работу лага. Излучающий тракт 1 и приемный тракт 2 обеспечивают излучение зондирующего сигнала и прием эхосигнала от дна.
Блок 3, реализуемый, например, как схема частотной или фазовой автоподстройки, обеспечивает непрерывное определение частоты, соответствующей максимуму доплеровского спектра эхо-сигнала. Здесь же могут решаться задачи обеспечения помехоустойчивости схемы лага - в этом случае блок 4 выполняется в виде известного из литературы "Следящего узкополосного фильтра". Блок 4 производит с учетом известного масштабного коэффициента (скоростной чувствительности лага) пересчет измеренных значений доплеровской частоты в значения измеряемой скорости. Однако выходные сигналы блока 4 предварительно необходимо скорректировать на величину погрешности, обусловленной смещением спектра. Эта погрешность вычисляется блоками 6-10. Блок 6, на входы которого поступает сигнал с выхода приемного тракта 2 и значение средней частоты спектра ωср со схемы слежения за частотой 3, производит вычисление разности энергий сигналов левой и правой частей спектра. В блоке 7 вычисляется полная энергия принятого эхосигнала. Выходное напряжение блока 7 используется в качестве опорного в блоке нормировки энергии 8. На сигнальный вход этот блока поступает сигнал с выхода блока 6. В блоке 8 осуществляются также необходимые операции по масштабированию величин. В результате на выходе блока 8 имеется сигнал, пропорциональный угловому смещению максимума доплеровского спектра сигнала, т.е. соответствующий выражению (4). Интегратор 9 обеспечивает усреднение величины δ0 по ряду посылок. Число этих посылок определяется необходимой точностью выработки поправки на смещение спектра. В перемножителе 10 осуществляются необходимые операции по пересчету угловой величины δ0 в значения поправки ΔVсм, в соответствии с формулой (5). Сумматор 11 реализует ввод поправки в измеренные значения скорости согласно формуле (6). Следует отметить, что все требующиеся операции по обработке сигнала в схеме предлагаемого лага могут быть легко реализованы с помощью средств вычислительной техники, которые в настоящее время начинают широко использоваться в гидроакустических лагах.
Положительный эффект.
В предлагаемом гидроакустическом лаге существенно повышается точность вычисления поправки к измеренным значениям скорости для компенсации погрешности за счет смещения доплеровского спектра эхо-сигнала. Вычисление поправки производится на основании информации, содержащейся в параметрах самого принятого сигнала, и данных об основных параметрах аппаратуры лага (раствор характеристики направленности антенны лага, угол наклона акустического луча, рабочая частота и др.), хорошо известных из результатов проектирования лагов и их предварительных испытаний. Каких-либо априорных предположений о характеристиках водной среды и морского дна, как это делалось ранее в лаге-прототипе "Самшит", не требуется. Также не требуется вводить информацию о глубине под килем. В связи с этим повышается (на 30-40%) как точность измерения скорости, так и удобство эксплуатации лага. Одновременно могут быть снижены требования к полигонам, где должна проводиться калибровки прецизионных гидроакустических лагов.
Источники информации.
1. Техническое описание лага MRQ-2015A, фирмы Marquardt, США.
2. Техническое описание лага TSM 5700 и TSM 5710 фирмы Thomson-CSF, Франция.
3. Акустика океана. Под редакцией акад. А.М.Бреховских, Москва: Наука, 1975.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1970 |
|
SU1840717A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛАГ | 1972 |
|
SU1840737A1 |
| Акустический доплеровский способ профилирования течений в водной среде | 2024 |
|
RU2840131C1 |
| ГИДРОАКУСТИЧЕСКИЙ ДОПЛЕРОВСКИЙ ЛАГ С АЛГОРИТМОМ МНОГОАЛЬТЕРНАТИВНОЙ ФИЛЬТРАЦИИ ЭХОСИГНАЛА, ОСНОВАННЫМ НА ИСПОЛЬЗОВАНИИ БАНКА ФИЛЬТРОВ КАЛМАНА | 2010 |
|
RU2439613C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2659710C1 |
| Многочастотный доплеровский способ измерений скорости течений в водной среде | 2022 |
|
RU2795579C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИИ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ | 2011 |
|
RU2466426C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| Способ измерения скорости судна доплеровским лагом | 2017 |
|
RU2665345C1 |
Изобретение относится к области проектирования гидроакустических допплеровских лагов и может быть использовано для измерения скорости корабля относительно дна моря. Технический результат заключается в повышении точности измерения скорости путем компенсации погрешности, обусловленной деформацией доплеровского спектра эхо-сигнала по отношению к его расчетному положению. В способе измерения скорости корабля относительно дна моря и устройстве для его осуществления введением блока вычисления суммарной мощности и разностной энергии левой и правой частей спектра относительно его максимума, блока нормировки разностной энергии, интегратора, перемножителя и сумматора производят спектральный анализ принятого эхо-сигнала раздельно в частотных полосах, расположенных по обе стороны от частоты максимального спектра эхо-сигнала, измеряют доли средней энергии сигнала на заданном временном интервале в указанных частотных полосах и определяют скорость νист корабля по формуле νист=νизм (1+К(Ел-Еп)/(Ел-Еп)), где νизм - измеренное значение скорости; ЕЛ, ЕП - энергия левой и правой частей спектра относительно его максимума; К - константа, определяемая параметрами аппаратуры лага. 2 н.п. ф-лы; 3 ил.

где Vизм. - измеренное значение скорости,
Ел, Еп - энергия; содержащаяся соответственно в левой и правой частях спектра относительно его максимума;
к - константа, определяемая параметрами аппаратуры лага.
| Г.И.Тузов | |||
| Выделение и обработка информации в допплеровских системах | |||
| М.: Сов | |||
| радио, 1967, стр.52 | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |

