Изобретение относится к области точного приборостроения и может быть использовано в процессе производства маятниковых компенсационных акселерометров.
Известен способ компенсации смещения нуля путем наложения момента с использованием магнитной системы датчика момента, в управляющую обмотку которого подается постоянный ток (Блюмин Г.Д. ″Теория и конструкция гироскопических приборов и систем″, стр.228).
Недостатком известного способа является сложность процесса регулировки из-за необходимости проведения нескольких подрегулировок для получения нулевой величины смещения нуля.
Наиболее близким по технической сущности к предлагаемому изобретению является способ регулировки смещения нуля маятникового компенсационного акселерометра путем измерения выходных сигналов при двух взаимно-противоположных положениях оси чувствительности вдоль вектора земного тяготения и создания дополнительного момента (авт. св. №1840184.).
По этому способу после определения смещения нуля акселерометра, обусловленного наличием вредных тяжений, создают дополнительный момент с помощью дополнительной магнитной системы, состоящей из двух стержневых магнитов с обмотками и ферромагнитного стержня, путем подачи в обмотки импульсов тока.
Известный способ имеет тот недостаток, что получение значения смещения нуля в пределах требуемых норм из-за разброса магнитных свойств отдельных магнитов, наличия допусков на изготовление деталей акселерометра и нестабильности параметров источника импульсов тока, возможно при выполнении нескольких циклов операций по наложению дополнительного момента и контролю смещения нуля акселерометра. Это значительно увеличивает время и усложняет процесс регулировки.
На практике регулировка смещения нуля современных акселерометров известными способами состоит из 3-5 подрегулировок и количество их возрастает с уменьшением величины допусков на регулировку.
Целью настоящего изобретения является сокращение трудоемкости процесса регулировки смещения нуля маятникового компенсационного акселерометра.
Указанная цель достигается тем, что в известном способе регулировки смещения нуля маятникового компенсационного акселерометра путем измерения выходных сигналов при двух взаимно противоположных положениях оси чувствительности вдоль вектора земного тяготения и создания дополнительного момента, операцию наложения дополнительного момента осуществляют в одном из двух положений до получения выходного сигнала, равного среднему значению измеренных выходных сигналов.
Предлагаемый способ включает в себя следующие операции:
1. Устанавливают акселерометр в положение оси чувствительности вдоль вектора земного тяготения,
2. Измеряют выходной сигнал I1;
5. Устанавливают акселерометр путей переворота в противоположное положение оси чувствительности вдоль вектора земного тяготения;
4. Измеряют выходной сигнал I2;
5. Вычисляют среднее значение измеренных выходных сигналов:

6. Создают дополнительный момент до получения выходного сигнала I, в одном из двух положений акселерометра (например, указанного в п.3), равного среднему значению I0.
На фиг.1 изображена схема маятникового компенсационного акселерометра. При действии ускорения маятник 2 поворачивает подвижную систему 1, установленную в опорах 3, при этом с датчика угла 4 через усилитель 5 подается сигнал в обмотку датчика момента 6. В результате в датчике 6 возникает момент, стремящийся возвратить подвижную систему 1 в исходное положение. Выходной сигнал I с усилителя 5 пропорционален действующему ускорению.
Компенсацию смещения нуля акселерометра, обусловленного наличием вредных тяжений, осуществляют силовым воздействием на ферромагнитный стержень 10 магнитного поля стержневых магнитов 7, которое создают и изменяют путем подачи импульсов тока от источника 9 в обмотки 8, намотанные на магниты 7.
Величина и знак дополнительного момента зависит от соотношения напряженностей магнитного поля магнитов 7.
По предлагаемому способу после измерения выходных сигналов I1 и I2 при двух взаимно-противоположных положениях оси чувствительности вдоль вектора земного тяготения определяют среднее значение выходных сигналов  и создают дополнительный момент при одном из двух положений оси чувствительности вдоль вектора земного тяготения, например, путем подачи от источника 9 возрастающих по амплитуде импульсов тока в обмотки 8, одновременно контролируя выходной сигнал I, до получения величины выходного сигнала I равного среднему значению I0.
и создают дополнительный момент при одном из двух положений оси чувствительности вдоль вектора земного тяготения, например, путем подачи от источника 9 возрастающих по амплитуде импульсов тока в обмотки 8, одновременно контролируя выходной сигнал I, до получения величины выходного сигнала I равного среднему значению I0.
До создания дополнительного момента величины измеренных выходных сигналов составляют:
I1=I0+ΔI;
I2=I0-ΔI;
где ΔIсм - смещение нуля акселерометра.
После наложения дополнительного момента величина контролируемого выходного сигнала изменилась на ΔI, например, уменьшилась на ΔI:
I1'=I0=I1-ΔI
Это соответствует тому, что величина выходного сигнала, измеренного в другом положении оси чувствительности вдоль вектора земного тяготения, увеличилась на ΔI:
I2'=I2+ΔI
При этом смещение нуля ΔI'см будет равно:

Таким образом, получение выходного сигнала, равного среднему значению I0, соответствует получению нулевого значения смещения нуля акселерометра.
Применение предлагаемого способа позволяет при выполнении операций создания дополнительного момента одновременно контролировать степень компенсации величины смещения нуля, что обеспечивает надежное получение нулевой величины смещения нуля за один цикл регулировки.
Предлагаемый способ может быть использован не только в рассматриваемой конструкции акселерометра, но и в любой другой, содержащей средство компенсации вредных тяжений.
Таким образом, использование предлагаемого способа регулировки смещения нуля акселерометра по сравнению с известными способами упрощает процесс регулировки и снижает трудоемкость ее в 3-5 раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1980 |
|
SU1840724A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1982 |
|
SU1839891A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839836A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАСШТАБНОГО КОЭФФИЦИЕНТА МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 2011 |
|
RU2465608C1 |
| Способ обеспечения линейности масштабного коэффициента в маятниковых компенсационных акселерометрах с магнитоэлектрическим датчиком момента | 2023 |
|
RU2808710C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1976 |
|
SU1839855A1 |
| МАЯТНИКОВЫЙ КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1975 |
|
SU1840663A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ В СИСТЕМАХ УПРАВЛЕНИЯ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362173C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 2008 |
|
RU2366961C1 |
Изобретение относится к области точного приборостроения и может быть использовано в процессе производства маятниковых компенсационных акселерометров. Сущность: способ регулировки осуществляется путем измерения выходных сигналов при двух взаимнопротивоположных положениях оси чувствительности в поле тяготения и наложения дополнительного момента. При этом наложение момента производят в одном из двух положений. Технический результат: упрощение регулировки. 1 ил.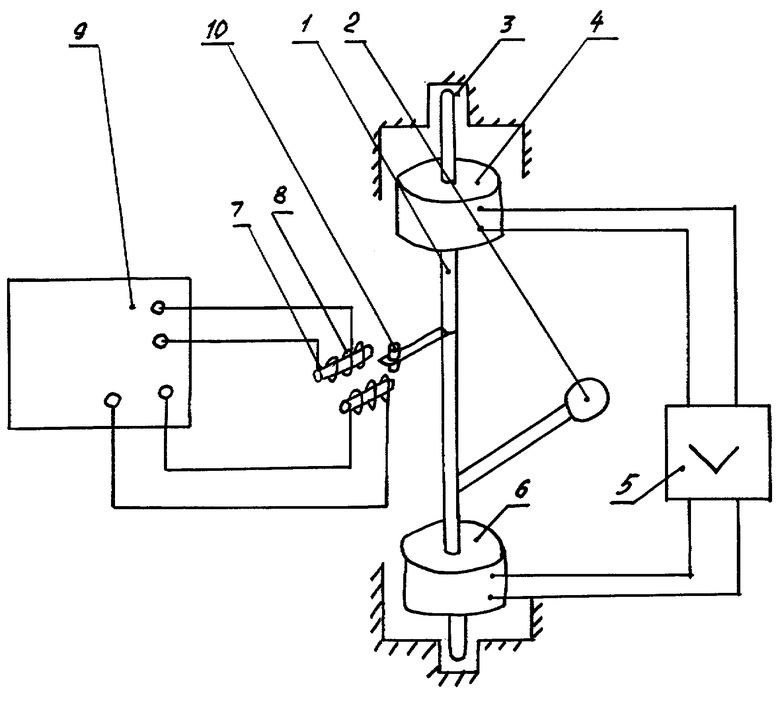
Способ регулировки смещения нуля маятникового компенсационного акселерометра путем измерения выходных сигналов при двух взаимно противоположных положениях оси чувствительности в поле тяготения и наложения дополнительного момента, отличающийся тем, что, с целью упрощения, наложение момента производят в одном из двух положений.
| Авт | |||
| свид | |||
| АВТОНОМНАЯ РУЛЕВАЯ МАШИНА | 1973 |
|
SU1840184A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

