Изобретение относится к области точного приборостроения и может быть использовано при контроле параметров прецизионных компенсационных акселерометров.
Известен способ определения мультипликативной составляющей погрешности компенсационного акселерометра путем измерения выходных сигналов при неизменном воздействии ускорения и смещении подвижной части (авт.св. №1839934, 2006).
Недостатком известного способа является то, что он не учитывает отличие нулевого положения подвижной части при контроле мультипликативной погрешности от нулевого положения в условиях реального полета, и приводит к возникновению дополнительной погрешности в эксплуатации.
Наиболее близким по технической сущности к предлагаемому изобретению является способ определения мультипликативной составляющей погрешности компенсационного акселерометра, заключающийся в измерении его выходных сигналов в трех положениях подвижной части при действии постоянного ускорения.
По этому способу измеряют выходные сигналы при действии постоянного ускорения в трех положениях подвижной части, одно из которых соответствует нулю датчика угла, два других получают смещением подвижной части в двух противоположных направлениях от нулевого положения, при этом мультипликативную составляющую погрешности определяют по результатам всех измерений с учетом нестабильности нуля датчика угла.
Недостатком известного способа является то, что из-за наличия крутизны изменения аддитивной составляющей погрешности по положению подвижной части акселерометра мультипликативная составляющая погрешности, измеренная при одном направлении действия ускорения, отличается от мультипликативной составляющей погрешности, определенной при противоположном, относительно оси чувствительности, направлении действия ускорения. Это приводит к занижению истинной величины мультипликативной погрешности для знакопеременных компенсационных акселерометров.
Целью настоящего изобретения является повышение точности определения мультипликативной составляющей погрешности компенсационных акселерометров.
Указанная цель достигается тем, что в известном способе определения мультипликативной составляющей погрешности компенсационного акселерометра, заключающемся в измерении его выходных сигналов в трех положениях подвижной части при действии постоянного ускорения, устанавливают акселерометр осью чувствительности в направлении, противоположном действию ускорения, и дополнительно измеряют выходные сигналы.
Предлагаемый способ включает в себя следующие операции:
1. Устанавливают прибор осью чувствительности в направлении действия земного тяготения.
2. Устанавливают подвижную часть в положении, соответствующем нулю датчика угла (ϕ=0).
3. Измеряют выходной сигнал I0 +.
4. Отклоняют подвижную часть на угол Δϕ1.
5. Измеряют выходной сигнал I1 +.
6. Вычисляют разность выходных сигналов

7. Перемещают подвижную часть в противоположную сторону, в положение, соответствующее отклонению на угол - Δϕ1 от нулевого положения (ϕ=-Δϕ1).
8. Измеряют выходной сигнал I2 +.
9. Вычисляют разность выходных сигналов
10. Определяют нестабильность нуля датчика угла Δϕ2.
11. Определяют мультипликативную составляющую погрешности для положительного направления действия ускорения

12. Устанавливают прибор осью чувствительности в направлении, противоположном действию земного тяготения.
13. Устанавливают подвижную часть в положение ϕ=0.
14. Измеряют выходной сигнал I0 -.
15. Отклоняют подвижную часть на угол Δϕ1.
16. Измеряют выходной сигнал I1 -.
17. Вычисляют разность выходных сигналов
18. Перемещают подвижную часть в положение ϕ=-Δϕ1.
19. Измеряют выходной сигнал I2 -.
20. Вычисляют разность выходных сигналов
21. Определяют мультипликативную составляющую погрешности для отрицательного направления действия ускорения
22. Определяют мультипликативную погрешность компенсационного акселерометра, выбирая максимальное по абсолютной величине значение из значений, подсчитанных по формулам 3, 6.
При наличии крутизны К изменения аддитивной составляющей погрешности А компенсационного акселерометра по положению ϕ подвижной части имеем:
где A0, A1, A2 - аддитивная погрешность акселерометра соответственно при ϕ=0, Δϕ1, -Δϕ1;
I0, I1, I2 - выходные сигналы акселерометра при положительном направлении действия ускорения, при K=0 и A0=0 и соответственно при ϕ=0, Δϕ1, -Δϕ1.
С учетом крутизны K формулы 1, 2, 4, 5 перепишутся в следующем виде:
где 
Учитывая формулы 11, 12 для выражений 3, 6, можно записать
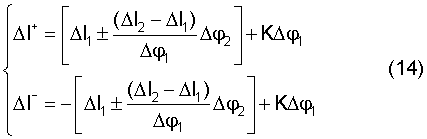
Перепишем формулу 14 в другом виде
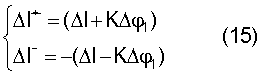
где 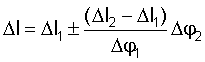 - мультипликативная погрешность для положительного направления действия ускорения при K=0.
- мультипликативная погрешность для положительного направления действия ускорения при K=0.
Анализ формулы 15 показывает, что при ненулевой крутизне аддитивной погрешности (K≠0) мультипликативные составляющие погрешности для положительного и отрицательного направления действия ускорения отличаются друг от друга на величину 2KΔϕ1.
Наличие этой погрешности приводит к занижению величины мультипликативной составляющей погрешности при ее контроле. Применение предлагаемого способа, включающего в себя операции установки прибора осью чувствительности в направлении, противоположном действию постоянного ускорения, и измерения выходных сигналов в этом положении, позволяет определить истинную величину мультипликативной погрешности компенсационного акселерометра.
Таким образом, предложенный способ обеспечивает повышение точности определения мультипликативной составляющей погрешности компенсационного акселерометра в 1,5-2 раза по сравнению с базовым объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МУЛЬТИПЛИКАТИВНОЙ СОСТАВЛЯЮЩЕЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1981 |
|
SU1839836A1 |
| СПОСОБ РЕГУЛИРОВКИ СМЕЩЕНИЯ НУЛЯ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1979 |
|
SU1839894A1 |
| Способ определения мультипликативной составляющей погрешности компенсационного акселерометра | 1976 |
|
SU1839934A1 |
| СПОСОБ РЕГУЛИРОВКИ МАЯТНИКОВОГО КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1980 |
|
SU1840724A1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КОМПЕНСАЦИОННОГО АКСЕЛЕРОМЕТРА | 1990 |
|
SU1785345A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ | 1996 |
|
RU2115884C1 |
| СПОСОБ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ ПОГРЕШНОСТИ КРУТИЗНЫ ХАРАКТЕРИСТИКИ АКСЕЛЕРОМЕТРА | 1993 |
|
RU2028001C1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕХАНИЧЕСКИХ ВЕЛИЧИН | 2001 |
|
RU2210744C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ НЕЛИНЕЙНОСТИ ХАРАКТЕРИСТИКИ КОМПЕНСАЦИОННЫХ АКСЕЛЕРОМЕТРОВ С МАГНИТОЭЛЕКТРИЧЕСКИМ ОБРАТНЫМ ПРЕОБРАЗОВАТЕЛЕМ | 1985 |
|
SU1344052A1 |
| ПРОСТРАНСТВЕННЫЙ АКСЕЛЕРОМЕТР С ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ | 1997 |
|
RU2138823C1 |
Изобретение относится к области точного приборостроения и может быть использовано при контроле параметров прецизионных компенсационных акселерометров. Сущность: способ определения мультипликативной составляющей погрешности компенсационного акселерометра включает в себя измерение его выходных в трех положениях подвижной части при действии постоянного ускорения. При этом акселерометр устанавливают осью чувствительности в направлении, противоположном действию ускорения. Дополнительно измеряют выходные сигналы. Технический результат: повышение точности.
Способ определения мультипликативной составляющей погрешности компенсационного акселерометра, заключающийся в измерении его выходных сигналов в трех положениях подвижной части при действии постоянного ускорения, отличающийся тем, что, с целью повышения точности, устанавливают акселерометр осью чувствительности в направлении, противоположном действию ускорения, и дополнительно измеряют выходные сигналы.

