Изобретение относится к измерительной технике, в частности к техническому диагностированию гироскопов с газодинамической опорой (ГДО) подвеса ротора, и может быть использовано для контроля жесткости ГДО при изготовлении и эксплуатации прецизионных приборов на газовой опоре.
Знание величины жесткости газодинамической опоры имеет существенное значение при подтверждении методик расчета основных точностных параметров ГДО, при обеспечении гарантий работоспособности опоры при воздействии эксплуатационных нагрузок, а также при оценке момента неравножесткости опоры, который, в основном, вызывает уход гироскопа, зависящий от ГДО подвеса ротора.
Известен способ контроля жесткости опоры подвеса ротора гироскопа [1], заключающийся в измерении индикатором перемещения (h) ротора гироскопа под действием тарированной нагрузки (Р), действующей на ось гироскопа. Жесткость (K) опоры определяется по соотношению  .
.
Заданная жесткость в этом способе достигается путем установки и контроля предварительной нагрузки на ш/п опору.
Основной недостаток рассмотренного способа, как отмечено в [1], в том, что он позволяет определить предварительную осевую нагрузку, а следовательно, и жесткость опоры лишь в статическом режиме. Кроме того, указанный способ не может быть использован при контроле четкости газодинамической опоры, т.к. в ГДО не создается натяг, а газовая опора работает постоянно с зазором и жесткость опоры создается лишь при образовании газового клина в зазоре.
Наиболее близким по технической сущности и достигаемому положительному эффекту к заявленному изобретению является способ измерения радиальной и осевой податливости гироскопа на газовых подшипниках [2], заключающийся в измерении перемещения вращающегося ротора под действием определенной нагрузки при помощи устройства для измерения емкости. Причем измеряется весьма малая емкость между концом емкостного щупа и доступным участком поверхности ротора.
Недостатком указанного способа контроля жесткости газодинамической опоры, принятого за прототип, являются сложность осуществления способа контроля и малая достоверность результатов измерения перемещения ротора под действием нагрузки. При измерении расстояний порядка нескольких десятых долей микрона недостаточная жесткость емкостного щупа или вала гироскопа может приводить к большим ошибкам в измерении перемещения, что, в конечном счете, скажется на точности оценки жесткости опоры.
При осуществлении указанного способа нагружение ротора гироскопа происходит при помощи оборудования со сложной кинематической схемой, которая также вносит свои погрешности в контроль жесткости.
Недостатком прототипа является еще и то, что контроль жесткости производится на специально подготовленном гироскопе с специально изготовленной газодинамической опорой подвеса ротора с встроенным в нее емкостными датчиками и этот способ не может быть использован при массовом изготовлении гироскопов. В реальных условиях изготовления гироскопа сборка ГДО происходит с технологическими допусками на рабочий зазор опоры, и поэтому жесткость ГДО у различных гироскопов одного типоразмера будет различной и ее необходимо объективно оценивать.
Целью настоящего изобретения является разработка достоверного контроля жесткости ГДО гироскопа в рабочих условиях методом неразрушающего контроля.
Кроме того, предлагаемый способ позволяет определить неравножесткость опоры, что крайне важно при оценке уходов гироскопа от неравножесткости конструкции, т.е. позволяет разделить из общей неравножесткости конструкции неравножесткость опоры и неравножесткость конструкционных элементов гироскопа.
Поставленная цель достигается тем, что в известном способе контроля жесткости ГДО, включающем вращение ротора гироскопа, на рабочих оборотах дополнительно измеряют угловую скорость ротора гироскопа на выбеге, при которой происходит контакт подвижных и неподвижных элементов опоры, и по измеренной величине судят о жесткости по формуле

где K - жесткость ГДО;
ωк - скорость контакта;
А - коэффициент, характеризующий рабочие условия работы гироскопа.
Сущность предложенного способа заключается в следующем.
Известно [3], что угловую скорость ротора гироскопа, например, с полусферической газовой опорой, при которой происходит "посадка" его, т.е. контакт подвижных и неподвижных частей опоры, можно определить

где G - вес ротора;
С - рабочий зазор в опоре;
μ - динамическая вязкость газовой среды;
R - радиус газового подшипника;
а - коэффициент, характеризующий микропрофиль опоры.
Известно [4] также, что жесткость полусферической ГДО и рабочий зазор связывает соотношение

где С - рабочий зазор в опоре;
K - жесткость ГДО;
ω - скорость вращения ротора.
Представляя 2 в 1 и делая некоторые математические преобразования, получим

Для определенного типоразмера гироскопа величины G, ω, a, μ, R известные и всегда постоянные, т.е. можно записать

Тогда

Т.о., по скорости "посадки" ротора можно определить жесткость ГДО.
Угловую скорость ротора гироскопа на выбеге, при которой происходит контакт подвижных и неподвижных элементов газодинамической опоры, можно определить с помощью сигнала с вибродатчика, закрепленного на корпусе гироскопа, синхронно замеряя при этом характеристику выбега ротора гироскопа. Сигнал с вибродатчика через усилитель подают на один из каналов 2-канального самописца, на другой канал синхронно подается сигнал с обмоток статора гиродвигателя. В обмотках гиродвигателя на выбеге генерируется ЭДС, пропорциональная скорости вращения ротора. Момент контакта характеризуется повышенной вибрацией гироскопа, которую отмечает вибродатчик и самописец. По полученным записям определяют скорость "посадки" ротора.
Предложенным способом можно также определить неравножесткость ГДО следующим образом
1. Определяют угловую скорость контакта ротора при горизонтальном положении оси ротора гироскопа, т.е. определяют радиальную жесткость ГДО
2. Определяют угловую скорость контакта ротора при вертикальном положении оси ротора гироскопа, т.е. определяют аксиальную (осевую) жесткость ГДО
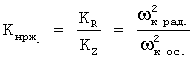
3. Неравножесткость ГДО определяют
Предложенный способ был реализован при контроле жесткости и неравножесткости газодинамической опоры гироскопа, состоящей из 2 симметрично расположенных полусферических подшипников со спиральными канавками.
Точность предложенного способа контроля жесткости ГДО оценивалась не только по расчетным величинам четкости опоры, найденным из численного решения уравнения Рейнольдса с учетом допусков на рабочий зазор, но и косвенным методом по величине скорости ухода (ωϕ) гироскопа, вызванной уводящим моментом Мϕ, зависящим от угла положения (ϕ). При этом уводящий момент зависит не только от угла положения опоры, но и от величины радиальной жесткости (KR).

где
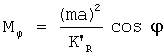
Н - кинетический момент,
ma - инерциальная масса.
Откуда
Представленные результаты испытаний хорошо показывают достаточную точность предложенного способа контроля жесткости ГДО.
Предложенный способ контроля жесткости ГДО по сравнению с прототипом позволяет получить следующие преимущества:
1) дает возможность проконтролировать жесткость ГДО в рабочих условиях работы гироскопа, что обеспечивает техническую диагностику прибора, методом неразрушающего контроля;
2) позволяет упростить способ контроля за счет применения стандартного оборудования;
3) позволяет выделить величину ухода гироскопа от неравножесткости ГДО из общей величины ухода, зависящего от неравножесткости всей конструкции гироприбора, что дает широкие возможности в части доработок конструкции гироскопа с целью улучшения его точностных характеристик.
Источники информации
1. Б.А.Делекторский и др. "Проектирование гироскопических электродвигателей". М., Машиностроение, 1968 г., стр.49.
2. "Подшипники с газовой смазкой", под редакцией Грэссема и Пауэлла, Мир., 1966 г., стр.315-320.
3. Проблемы развития газовой смазки. М., Наука, 1972 г., часть 2.
4. "Подшипники с газовой смазкой для оси ротора гироскопа. Источник: Technical Report of Mechanical Technology Incorporated по MTI-68 ТK29.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИАГНОСТИКИ РОТОРА ГИРОСКОПА НА ГАЗОДИНАМИЧЕСКОЙ ОПОРЕ | 1984 |
|
SU1840738A1 |
| СПОСОБ КОНТРОЛЯ ГАЗОВОЙ ОПОРЫ | 1986 |
|
SU1840744A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ СФЕРИЧЕСКОЙ ГАЗОДИНАМИЧЕСКОЙ ОПОРЫ ГИРОСКОПА | 1985 |
|
SU1840742A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОПОРЫ НА ГАЗОВОЙ СМАЗКЕ | 1986 |
|
SU1839830A2 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП С ШАРОВЫМ ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ | 2004 |
|
RU2264596C1 |
| СПОСОБ ВЫСТАВКИ РАБОЧЕГО ЗАЗОРА В ПОЛУСФЕРИЧЕСКОЙ ГАЗОДИНАМИЧЕСКОЙ ОПОРЕ | 1985 |
|
SU1840673A1 |
| СПОСОБ ДИАГНОСТИКИ СОСТОЯНИЯ ОПОР РОТОРА ГИРОСКОПА | 1988 |
|
SU1840748A1 |
| Способ диагностики состояния газодинамической опоры ротора поплавкового гироскопа | 2018 |
|
RU2690231C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| СПОСОБ КОНТРОЛЯ ОПОР СКОЛЬЖЕНИЯ С ГАЗОВОЙ СМАЗКОЙ ПОДВЕСА РОТОРА ГИРОСКОПА | 1984 |
|
SU1840736A1 |
Изобретение относится к измерительной технике и может быть использовано для контроля жесткости газодинамической опоры при изготовлении и эксплуатации прецизионных приборов на газовой опоре. Способ включает вращение ротора гироскопа с рабочей скоростью и измерение скорости вращения ротора, при которой происходит контакт ротора с невращающимися частями опоры в режиме выбега, и определение жесткости по формуле. Для определения неравножесткости измеряют скорости вращения ротора, при которых происходит контакт ротора с невращающимися частями опоры при горизонтальном и вертикальном положениях оси ротора. Техническим результатом является повышение достоверности контроля и упрощение способа. 1 з.п. ф-лы.
 ,
,
где G - вес ротора;
μ - динамическая вязкость газовой среды,
R - радиус опоры;
a - коэффициент, характеризующий микропрофиль опоры.
где
ωк.рад - скорость вращения ротора, при которой происходит его контакт с не вращающимися частями опоры при горизонтальном положении его оси;
ωк.ос - скорость вращения ротора, при которой происходит его контакт с невращающимися частями опоры при вертикальном положении его оси.
| Б.А.Делекторский и др | |||
| Проектирование гироскопических электродвигателей, М.: Машиностроение, 1958, с.49 | |||
| Подшипники с газовой смазкой / под ред | |||
| Дж.Грэссема и У.Пауэлла М.: Мир, 1966, с.315-320. |

